Design and Experiment of Slave Computer Control System for Applying Variable-rate Liquid Fertilizer
2015-11-25ZhangYingziChenHaitaoHouShouyinJiWenyiOuyangBinlinDunGuoqiangandZhangJicheng
Zhang Ying-zi, Chen Hai-tao, Hou Shou-yin, Ji Wen-yi, Ouyang Bin-lin, Dun Guo-qiang, and Zhang Ji-cheng
College of Engineering, Northeast Agricultural University, Harbin 150030, China
Design and Experiment of Slave Computer Control System for Applying Variable-rate Liquid Fertilizer
ZhangYing-zi,ChenHai-tao*,HouShou-yin,JiWen-yi,OuyangBin-lin,DunGuo-qiang,andZhangJi-cheng
CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China
Inordertoincreasetheapplyingrateofliquidfertilizerandreduceenvironmentalpollution,aslavecomputercontrol systemforapplyingvariable-rateliquidfertilizerwasdesigned.ThesystemusedSMCascoreprocessorandelectricallycontrolled pressureregulatorasexecutioncomponent.Thecharacteristicequationofthesystemwasobtainedbyusingclassicalcontroltheory. Resultsindicatedthatthecharacteristicequationmettherequirementsofrouth-criterion,whichindicatedtheworkingprocessofthe systemwasstable.Performanceoftheslavecomputerwasverifiedviabenchtests.Resultsdemonstratedthattherewasnosignificant influenceontheresponsefrominterclasserror.Thefertilizationerrorwaslessthan0.9,andthefertilizationaccuracywaslargerthan 97%.Theliquidfertilizeremittedbythefertilizingdeviceshadnosignificantdifferenceinuniformity,whichmetthedemandsofthe slavecomputercontrolsystemforapplyingvariable-rateliquidfertilizer.
variable-ratefertilization,controlsystem,mathematicalmodel
Introduction
Inordertohavehigherrateoffoodproduction,many peasanthouseholdsusefertilizersandpesticides blindly,whichcanresultinaseriesofproblems,such asawasteofresourcesandagriculturalecological environmentpollution(Shiet al.,2014;Weiet al., 2013;Fanet al.,2014).ItmaymakesensetoagriculturaldevelopmentinChina,ifstudiesarecarried outonhowfertilizerscanbeusedinareasonable way.Variable-ratefertilizationisdesignedtodivide thewholeplotintosmalloperatingunitsandfertilize withdifferentproportionsofthefertilizers,basedon diversityofthesoilfertilityandcropgrowth(Liu et al.,2012;Liet al.,2010).
Atpresent,variable-ratefertilizationtechnology isstillinlabdevelopingstageinChina.Basedon practicalneedsandcurrenttechnicallevels,anindepthresearchonvariable-ratefertilizationcontrol systemisconducted.Theslavecomputerisaction executioncomponentofthecontrolsystemthat performsoperationsaccordingtotheoperation informationfrommastercomputerviacommunication module.Atheoreticalandexperimentalresearchwas conductedonthefertilizationcontrollerintheslave computercontrolsystem.
Materials and Methods
Equipment and instrument
FertilizationcontrollermanufacturedbyNortheastAgriculturalUniversitywasusedascontroldevice; electricallycontrolledpressureregulatorwithstyle BC44BRL-24-03Dwasusedasexecutiondevice; three-phaseasynchronousmotorwithstyleY100L2-4 wasusedasoutputdeviceofpower;highpressurepowerfertilizationpumpwithstyle3WZ-70 producedbyShanghaiSuNongPump,Inc.was usedasinputdeviceforliquidfertilizer;thepressure transmitterwithstyleTS-800-FproducedbyShanghai MeterFactoryandflowmeterwithstyle801produced byPuriSpraySystem,Inc.wereusedasfeedback device.
Test for uniformity of fertilization
Theimportantperformanceindexoftheslavecomputercontrolsystemwastheuniformityofthefertilization.Theuniformityoffertilizationwasverified bytest.Workingstatusoftheenginewassettoafixed condition.Internalsystempressurewasadjustedto 0.2MPa.Whenthecontrolsystemwasstable,four exitsofliquidfertilizerwereselectedastestingpoints fortheuniformitytestofthefertilization.Thefluxof eachexitwasrecordedforthesameperiodoftimeby usingmeasuringglass.Theexperimentwasrepeated forthreetimes.
Test for precision of fertilization
Theimportantperformanceindexoftheslave computercontrolsystemwastheprecisionofthe fertilization.Theprecisionofthefertilizationwas verifiedbytest.Workingfrequencyoftheconverter wassetto40Hz.Internalsystempressurewas adjustedto0.2MPa.Fertilizationcontrollerreceived 10setsoftargetfertilizingamountdatafrommaster PCandeachsetofrealfertilizingamountdatawas recorded.Contrastedthetargetfertilizingamountdata withrealfertilizingamountdataandthencalculated theprecisionofthefertilization.
Results
ResultsoftheuniformityofthefertilizationexperimentsareshowninTable1andresultsofANOVAfor uniformityofthefertilizationexperimentsareshown inTable2.Forthegivensignificantlevelof0.01,the valueofProb>Flessthan0.01indicatedthattherewas nosignificantdifferenceintheflowofthefourexitsof theliquidfertilizer.

Table 1 Test factors and data

Table 2 Analyses of variance
Resultsoftheprecisionofthefertilizationexperiments areshowninTable3andresultsofANOVAforprecision ofthefertilizationexperimentsareshowninTable4. AsshowninTable3,fertilizationaccuracycouldreachatleast97.00%.Thevalueoftheminimumerrorwas 0.1,andthevalueofmaximalerrorwas0.9.Asshown inTable4,forthegivensignificantlevelof0.01,the valueofProb>Flessthan0.0001indicatedthatinterclass errorhadnosignificantinfluenceontheresponseto fertilizationaccuracy.Theresultsindicatedthatthe hardwareandsoftwaredesignsoftheslavecontrol systemwerereasonable.
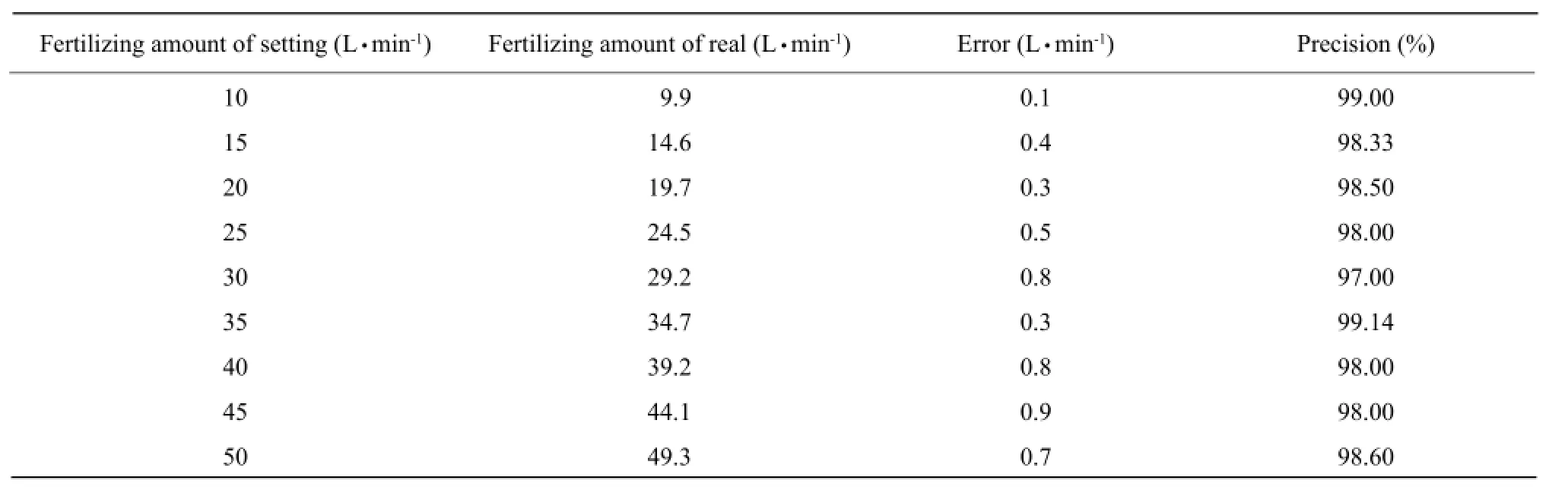
Table 3 Test factor and data

Table 4 Analysis of variance
Discussion
Operation theory of system
Theslavecomputercontrolsystemwasconsistedoffertilizationpump,fertilizationcontroller,electricregulating valve,pressuretransmitterandflowmeter(Fig.1).
Whileworking,powerproducerdrovethefertilizationpump.Thefertilizationpumptookouttheliquid fertilizerfromfertilizerbins.Signalofthetarget fertilizationvolumefrommastercomputerwassentto thefertilizationcontrollerviaserialcommunication. Thefertilizationcontrolleramplifiedthecontrolsignal, smoothedthefluctuation,calculatedandchangedthe sizeoftheoutputvoltageandchangedtheaperture ofthevalveport.Thefeedbacksignalofthevessel's liquidpressurefrompressuretransmitterwassentto thefertilizationcontrollerintheformoftheelectrical signal.Thefeedbacksignalofthevessel'sliquid flowfromflowmeterwassenttothefertilization controllerintheformoftheelectricalsignal.Itserved asthesystem'sfeedbackcorrectionsegmenttomake thecontrolsystemasaclosedloop.Therefore,the controlledfertilizervolumecouldbechangedaccording tothetargetfertilizervolumeandtheerrorcausedby thedisturbancecouldbecorrected.Thepurposeofthe intelligentautomaticfertilizervolumeadjustmentcould beachieved(Oliveret al.,2010;Wanget al.,2009; Yanget al.,2006).
Fertilizationcontrollerwasthecoreoftheslave computercontrolsystem.Inthisresearch,singlechip micyoco(SCM)withstyleSTC12C5412ADproducedbyAtmelCo.,Ltd.actedasthecoreoffertilization controlleranditsupperfrequencycouldreach35MHz. SCMwasequippedwithserialperipheralinterface(SPI), analogdigital(AD)andmanyotherperipheralmodules, whichgreatlysimplifieddesignofperipherycircuit. SCMcommunicatedwithA/DtransformerandD/A transformerviaSPIbus.Thefertilizationcontrollerwas usedforcomparingfeedbacksignalsofliquidpressure andflowanddrivingelectricregulatingvalve(Camp et al.,2000).Shiftregisterchip74HC595,digital-toanalogueconversionchipDAC0832,operational amplifierμA741wereusedforconstructingdriven circuit.OptoelectronicisolationchipTLP521andSchmitt trigger74HC14wereusedforconstructingdigitalsignal regulatorcircuit(Zhuet al.,2007;Yanget al.,2006). OperationalamplifierOP07andhigh-precisionvoltage chipTL431wereusedforconstructinganalogsignal regulatorcircuit,whichcollectedandprocessedsignal frompressuresensor(Yanget al.,2001;Lin,et al.,2006; Yanget al.,2004).

Fig. 1 Control system structure diagram
Fertilizationdatawastransferredfromparallelportof materPCtoslavePCSTC12C5412AD(SCM).Fertilizationcontrollertransformedfertilizationamount fromdigitaldatatoanalogvalueviausingD/Aconverter.Byamplifyingthedrivingfertilizationsignal, fertilizationcontrollercontrolledtheopeningdegree oftheelectro-hydraulicproportionalvalve.Theslave computercontrolsystemcontrolledtheflowofthe liquidfertilizerandachievedthegoalofthevariable controlofthefertilization.Feedbacksignalacquisition moduleincludedflowmeterandpressuretransmitter. Thismoduletransformedtheflowandpressurechange intovoltagechange.Throughtheprocessofthesignal amplificationandnoisereduction,A/Dconverter convertedtheanalogsignalintodigitalsignalandsent thesignalbacktoSCM.SCMadjustedtheopening degreeoftheelectricallycontrolledpressureregulating valveaccordingtothedeviationbetweenthecalculated targetfertilizationamountandtheactualamount(Li, 2006).
System stability analysis
Duringtheworkingprocess,flowmeterwasusedfor detectingtheflowoffertilizerpipeanddetermining whetherthefluxreachesthevaluesetbyPC.Ifnot, thisinformationwassentbacktoSCM.Incremental proportion-integration-differentiation(PID)algorithm wasusedforadjustingthecontrolsystemtoachievethe goalofprecisecontroleffectofthefertilization(Guo, 2006).Electricallycontrolledpressureregulatorwasthe executionunit.Fromprincipleoftheautomaticcontrol system,thedeviationequationwasshownasthe following:

Intheequationabove,tindicatedworkingtimeof slavecomputercontrolsystem;e(t)indicateddeviation;uo(t)indicatedthereferenceortargetvalue,whichwasthe presetfertilizationamount;u(t)indicatedsample,which wastheactualfertilizationamountinthiscase(Chen et al.,2011).PIDcontrollerdeviationequationwas shownasthefollowing:

Intheequationabove,ea(t)wasthedeviationafter correction;Kpwasaproportionalityfactor;Kiwas theintegrationtimeconstant;Kdwasthedifferential timeconstant.Controlvalueea(t)wasactuallylinear combinationofproportion,integrationanddifferentiation. Theslavecomputercontrolsystemwascarriedoutby electricallycontrolledpressureregulator.
Theslavecomputercontrolsystemmainlyconsisted offertilizationcontroller,electricallycontrolledpressure regulatoranddetectionfeedbackcomponents.Asthe componentofexecutionunit,electricallycontrolled pressureregulatorhaduniquepropertyandstructureand playedanimportantrole(Liet al.,2009;Xu,2009;Fan et al.,2014).Electricallycontrolledpressureregulator dynamicequationwasshownasthefollowing:

Intheequationabove,Va(t)wastheinputvoltageof theamplifiercircuit;Kawastheamplifierfactorofthe amplifiercircuit.TheLaplacetransformofequation (2)wascombinedwithequation(3).Wecouldgetthe transferfunctionoftheelectricallycontrolledpressure regulatorasthefollowing:

Intheequationabove,Va(s)wastheformofLaplace transformaftertransformedbyVa(t).Thissystemused theincrementalPIDalgorithm(Wanget al.,2008). Electricallycontrolledpressureregulatorwascontrolled by Δu(n).nwasthesamplenumber.n=0,1,2,…(Zhang et al.,2003).Wegotdifferenceequationshownasthe following:

Intheequationabove,nwasthemaximumnumberof samples; Δu(n)wastheincrement;e(n),e(n–1)ande(n–2)werethepreviouserror,thefirsttwoerrorsandthefirst threeerrors,respectively.Thiscontrolsystemhadtwo kindsofworkingmode.Closed-loopwasobtainedintest workingmode(Wang et al.,2004),soastodetermine thecriticalstabilityoscillationcycleTc=100andcritical oscillationfactorKc=20.Evaluatingexpressionswere shownasthefollowings:

Intheequationsabove,Tdwasthesamplingperiod;Tnwastheintegrationtime;andTvwasthederivativetime. WegotthatKpequaledto12,Kiequaledto240,andKdequaledto0.144.Thus,thetransferfunctionwasshown asthefollowing:

Theoutputofthefertilizationpumpwasfertilization amount.Theinputofthefertilizationpumpwasthe speedofmotor.Themodelcouldberegardedasafirstordersystemanditstransferfunctionwasshownasthe following:

Intheequationabove,K1wasthegainoffertilizer;and T wasthetimeconstant.Theinputformoffertilization pumpwasstepfunction.Theequationwasshownasthe following:

Intheequationabove,N(s)wastheLaplacecomplex variableformcorrespondington(t).Thefertilization amountequationwasshownasthefollowing:

Intheequationabove,Q(s)wasLaplacecomplex variableformcorrespondingtoq(t).Equation(13)was theinverseLaplacetransformcorrespondingtoequation (12).Weobtainedtherelationshipbetweenfertilization amountandtime.

Intheequationabove,q(t)wasthetimedomainform offertilizationamount.Whenthefertilizationpump workedstably,Kindicatedelectricrotatingspeedand equaledto250.InordertoobtainthetimeconstantT andfertilizergainK1,anexperimenthadbeendone accordingtoequation(13).ThoughMATLABcurve fittingfunctionscombiningwiththetestdata,wegot thatK1equaledto0.0029andT equaledto0.0001. Electricallycontrolledpressureregulatorandfertilizationpumpcharacteristicequationswereshownasthe followings:

Intheequationsabove,D1(s)andD2(s)represented electricallycontrolledpressureregulatorandfertilization pumpcharacteristicequations,respectively.
Eachscalefactorinengineeringapplicationswas positive.Itwasfoundthateachscalefactorinthefirst columnofrouth-listwaspositive,meetingrouth-criterion.Electricallycontrolledpressureregulatorand fertilizationpumpmathematicalmodelswerestable(Lang et al.,2013).
Conclusions
TheslavecomputercontrolsystemforapplyingvariablerateliquidfertilizerwithSMCasthecoredevicewas designedbyusingelectricallycontrolledpressure regulatorasexecutioncomponent.Thesystemachieved thepurposeofadjustingthefertilizingamountaccording tothegivenfertilizationsignalsautomatically.The performanceoftheslavecomputercontrolsystemwas verifiedviabenchtests.Theresultsshowedthatthe fertilizationerrorwaslessthan0.9,andthefertilization accuracywaslargerthan97%.Itwasdemonstrated thatinterclasserrorhadnosignificantinfluenceonthe response.Theliquidfertilizeremittedbythefertilizing deviceshadnosignificantdifferenceinuniformity,which metthedemandsoftheslavecomputercontrolsystem forapplyingvariable-rateliquidfertilizer.
References
CampCR,SadlerEJ,EvansDE,et al.2000.Variable-ratedigitally controlledmeteringdevice. Transactions of the ASAE,16(1):39-44.
ChenSF,LiZL,ShentuLF.2011.Designandexperimentalresearch ofhydraulicvariable-ratefertilizationsystem.Machinery Design & Manufacture,12:102-105.
FanJ,LiuQH,LiuXM,et al.2014.Simulationofmulti-fertilizers blendingprocessandoptimizationofblendingcavitystructurein nutrientproportionofvariableratefertilization.Transactions of the CSAM,45(6):126-131.
FanJ,LiuQH,LiuXM,et al.2014.Granularmulti-flowsfertilization processsimulationandtubestructureoptimizationinnutrient proportionofvariableratefertilization.Transactions of the CSAM, 45(11):81-87.
GuoSM.2006.Study of a using an intelligent controller variable-rate fertilization technology.HenanAgriculturalUniversity,Zhengzhou.
LangCL,WangJW,WangJF,et al.2013.Variablefertilizercontrol systemfordeepfertilizationliquidfertilizerapplicator.Transactions of the CSAM, 44(2):44-47.
LiAC,WangX,LiL,et al.2009.Studyontheelectricallycontrolled hydraulicmotordrivecontroller.Journal of Heilongjiang August First Land Reclamation University,21(1):66-68.
LiHY.2006. Research on variable rate fertilization control system in precision agricultural.Xi'anUniversityofScienceandTechnology, Xi'an.
LiY,ZhaoJ,XieYW,et al.2010.Designanddevelopmentof decisionsupportsystemforprecisionfertilizationbasedonlandplot. Transactions of the CSAE,26(Supp.1):192-196.
LinCH,TangQF,TangSM.2006.Theresearchandapplication prospectofprecisefertilizationtechniques.Journal of South China University of Tropical Agricultural,12(2):76-79.
LiuYC.2012.Keytechnologyonvariablerateapplicationsystem.Chinese Academy of Agricultural Mechanization Sciences,5: 71-75.
OliverYM,RobertsonMJ,WongMTF.2010.Integratingfarmer knowledge,precisionagriculturetools,andcropsimulationmodellingtoevaluatemanagementoptionsforpoor-performingpatchesin croppingfields.European Journal of Agronomy,32:40-51.
ShiZ,LiangZZ,YangYY, et al.2014.Statusandprospectof agriculturalremotesensing. Transactions of the CSAM,26:31-36.
WangJW,JiWY,FengJL,et al.2008.Designandexperimentalinvestigationoftheliquidfertilizerapplicator.Transactions of the CSAE,24(6):157-159.
WangX,ZhaoCJ,MengZJ,et al.2004.Designandexperimentof variableratefertilizerapplicator.Transactions of the CSAE,20(5): 114-117.
WangZL,FuQ,JiangQX.2009.Comprehensiveevaluationofsoil fertilitybasedonGISandattributerecognitionmodel.Transactions of the CSAE,25(6):76-80.
WeiXH,DanZM,SunHW,et al.2013.Developmentofvehicular embeddedinformationprocessingsystemformap-basedprecision farming.Transactions of the CSAE,29(6):142-149.
XuXD.2009.Test-bed for hydraulic motors and computer control technology applied research.ShenyangUniversityofTechnology, Shenyang.
YangQ,PangSJ,LiYJ,et al.2006.Designofvariableratecontrol systemofwaterapplicationbasedonGPSandGIS.Transactions of the CSAE,22(10):134-138.
YangQ,ZhangZ,PangSJ,et al.2004.Fieldvehicleposition monitoringsystembasedonGPSandGIS.Transactions of the CSAE, 20(4):84-87.
YangYN,WuCC,FengCP.2001.Thestatusofprecisionagriculture inJapan.Transactions of the CSAM,32(2):107-110.
ZhangSH,MaCL,WuCC,et al.2003.Developmentandapplication ofavariableratefertilizerapplicatorforprecisionagriculture.Transactions of the CSAE,19(1):129-131.
ZhuHC,ZhangL,LiuHY,et al.2007.Soilnutrientevaluationand recommendedmodelforChinesegooseberryfertilizationbasedon GIS.Transactions of the CSAE,23(6):194-198.
TP29 Document code: A Article ID: 1006-8104(2015)-02-0073-07
16January2015
SupportedbytheScienceandTechnologyResearchProjectofthe12thFive-yearPlan(2011BAD20B03-01)
ZhangYing-zi(1989-),female,Master,engagedintheresearchofagriculturalelectrificationandautomation.E-mail:18746048532@163.com
*.ChenHai-tao,professor,supervisorofPh.Dstudent,engagedintheresearchofagriculturalmechanizationengineering.E-mail: htchen@neau.edu.cn
杂志排行

Journal of Northeast Agricultural University(English Edition)的其它文章
- Effects of Rice Yield and Quality Across Accumulated Temperature Zone Planting in Cold Area
- Separation and Purification of Total Phloroglucinols in Dryopteris crassirhizoma with DM-130 Macroporous Adsorption Resin
- Characterization and Expression of Outer Membrane Protein A I Gene of Aeromonas veronii
- Construction and Expression of Methionine-rich and Lysine-rich Fusion Gene in Bacillus natto
- Isolation and Pathogenicity Analyses on Yersinia enterocolitica from Pelteobagrus vachelli
- Effects of Three Different Diluents on Quality of Boar Semen Stored at 17℃