基于电动汽车的无刷直流电机低扭矩脉动混合矢量驱动控制
2015-11-25张立伟毛学宇
张立伟 毛学宇
(北京交通大学电气学院 北京 100044)
0 引言
对于无刷直流电机(Brushless Direct Current Motor,BLDCM)来说,转矩脉动抑制一直是该研究领域的重要课题。BLDCM 转矩脉动按产生原因可分为电磁脉动和电流换向脉动。电磁脉动主要涉及到电机绕组与转子磁场设计问题,当前主要通过对电机电磁结构进行优化设计,改进或是减小这种电磁引起的转矩波动。电流换向脉动是BLDCM 绕组电流导通换向过程中产生的电流脉动,进而造成电磁转矩脉动,当前主要有Kwang-Woon Lee 等学者提出的电流反馈法[1]、谢杨梅提出的滞环电流法[2]、重叠换相法以及PWM 斩波法[3-5]。也有学者提出在人工智能的基础上实现专家系统、基于模糊集合理论的模糊控制、基于神经网络的神经化控制等[6],以减小这种换向转矩脉动。文献[7]提出了一种新的基于电流预测控制的新方法,以使非换相电流保持恒定。文献[8]提出了一种针对常规空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)中零矢量u0和u7的工作时间平均分配的特点引入了一个正比于u7工作时间的系数k0,并发现k0取不同值时可以实现多种PWM 调制方式,因此提出了一种统一PWM 的概念。文献[9]通过对5种PWM 调制方式的分析比较,得出PWM-ON 调制方式较理想,能够有效抑制电机的换相转矩脉动。文献[10]在PWM-ON 的调制基础之上,提出了一种新型的控制方式,使关断相电流下降速率与导通相电流上升速率相同,从而减小了换相转矩脉动。而实际上,永磁无刷电机是一种交流电机,具有非线性、强耦合、时变性的特征,且电机运行过程中还会受到各种外界环境的干扰,因此如果按照常态化的控制策略对永磁无刷电机进行控制,不能实现高性能的控制需求。再者常态化控制策略要么只是针对特定的对象,要么需要较好的参数辨识,要么对电流传感器、速度传感器等传感器要求较高[11,12],成本高、实用性差。
为了减小换向时刻的电流突变,近些年提出了正弦波电流驱动方案[13],这些方案并没有在理论上深入分析转矩脉动成因,因而效果不尽一致。另外正弦波电流驱动一般需要较为精确的转子位置信息,依靠低成本霍尔位置传感器来估算转子位置,在起动时刻无法准确跟踪,从而降低起动转矩性能。
本文对BLDCM 的换向转矩脉动进行分析,研究了反电动势宽度与波形畸变对转矩脉动的影响。经过逐一推导分析,提出了几种不同的驱动控制策略。最后通过比较分析,并结合这几种驱动策略的优势,提出了一种基于低成本霍尔位置传感器的BLDCM 混合矢量驱动控制策略。
1 BLDCM 方波驱动转矩脉动分析
1.1 换向状态
当BLDCM 以方波电流驱动时,实际因绕组呈现为感性,使得导通电流无法突变,尤其在换向期间,因为其他相无法理想通断导致非换向相绕组电流扰动,进而产生换向转矩脉动。
以图1 为例,当S1、S4 开通时,绕组AB 相导通;S1、S6 开通时,绕组AC 相导通。换向导通阶段会经历几个状态,在S1、S6 开通初始阶段,绕组B 相中的电流经S3 上的反并联二极管续流,与S1、绕组A 形成回路。另一条回路由S1、绕组A、绕组C、S6 组成。这个状态应满足方程
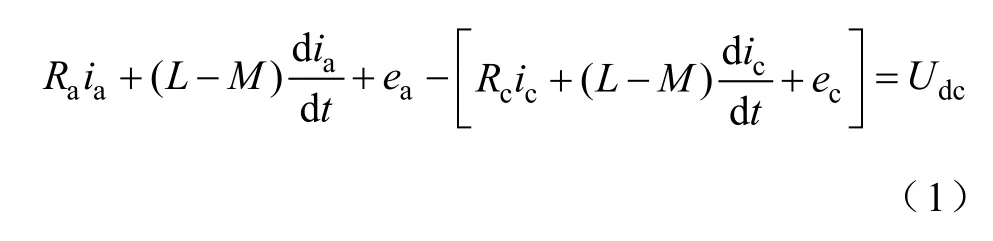

图1 换向状态1Fig.1 Commutation state 1

式中,t 为换向状态1 经历时间;L 为绕组自感;M为绕组互感。定子绕组对称且为星形联结,有

三相绕组反电动势为理想状态时,有

设I 为绕组相电流稳态值,为简化运算,忽略绕组电阻,由式(1)~式(4)可求得

此时,当S1、S6 关断时,绕组A 中的电流会通过S2 上的续流二极管分别流经绕组B、绕组C,通过S3、S5 上的续流二极管分别与电源Udc形成回路,此换向状态如图2 所示。
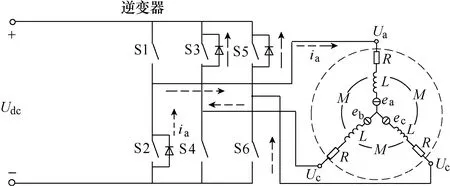
图2 换向状态2Fig.2 Commutation state 2
同理,可求得绕组中电流为

式中,Ia1、Ib1、Ic1分别为 ia、ib、ic在换向状态1到换向状态2 的电流幅值。
由式(5),当 Udc=4Ve时,d ib/d t=d ic/dt,即在换向时 ib和 ic变化率一致,非换向相电流 ia保持恒值不变,此状态如图3 所示。

图3 Udc=4Ve时,相电流变化Fig.3 Phase current variation when Udc=4Ve
在理想反电动势情况下,可推导BLDCM 转矩公式为

由式(7)可看出,在理想反电动势情况下,BLDCM 的转矩与非换向相电流成正比。在 Udc=4Ve时,非换向相电流 ia保持不变,此时转矩无脉动。但是当 Udc≠4Ve时,相电流 ib和 ic没有在同时达到稳定值或零值,造成非换向相电流 ia产生波动,进而造成转矩换向脉动,如图4 所示。

图4 Udc≠4Ve时,相电流变化Fig.4 Phase current variation when Udc≠4Ve
由式(5)可知,在 Udc≠4Ve时,ia会产生波动。以图4 为例,在t1'时 ic达到稳态值I,由式(5)可求出
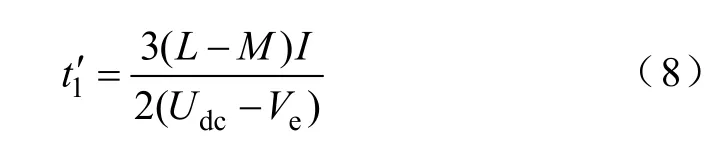
此时ai 的波动值为

由式(9)可知,在母线电压保持不变的情况下,相电流 ia的波动与反电动势系数及转速等相关。在Udc=220V,K=0.06V/(r/min)情况下,基速 ωr=1 833r/min,波动值Δia与转速关系如图5 所示。

图5 aiΔ 波动值随转速变化曲线Fig.5 Δai fluctuations curve with the speed
由图5 可直观的看出,在理想反电动势下,非换向相电流波动值随着转子转速变化而变化:在0.5ωr以下时,电流波动值随着转速升高而降低;经过0.5ωr后,电流波动值随着转速的继续升高而急剧增大。为了抑制这种非换向相电流对转矩脉动的影响,本文通过仿真比较了理想方波电流驱动下的转矩脉动,其值为Tes,如图6 所示。
图6a、图6b 的各自的上图为传统方波驱动下的仿真结果,下图为电流跟踪控制波形以实现理想方波驱动。可以看出,传统方波驱动下的在换向时的突变严重,当以理想方波驱动时,转矩脉动得到了很好的抑制。
1.2 BLDCM 非理想反电动势分布
实际中BLDCM 气隙磁通密度分布并不是理想的120°梯形波分布[13],如图7 所示。
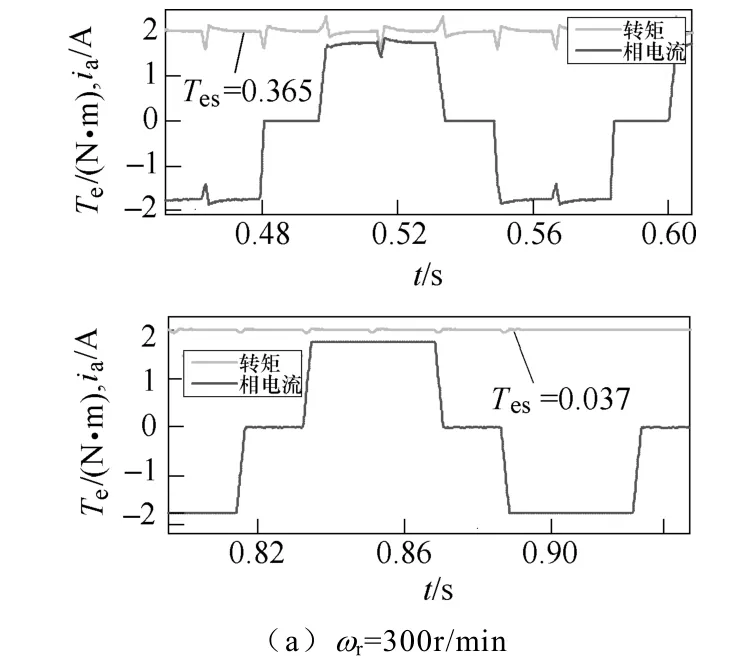
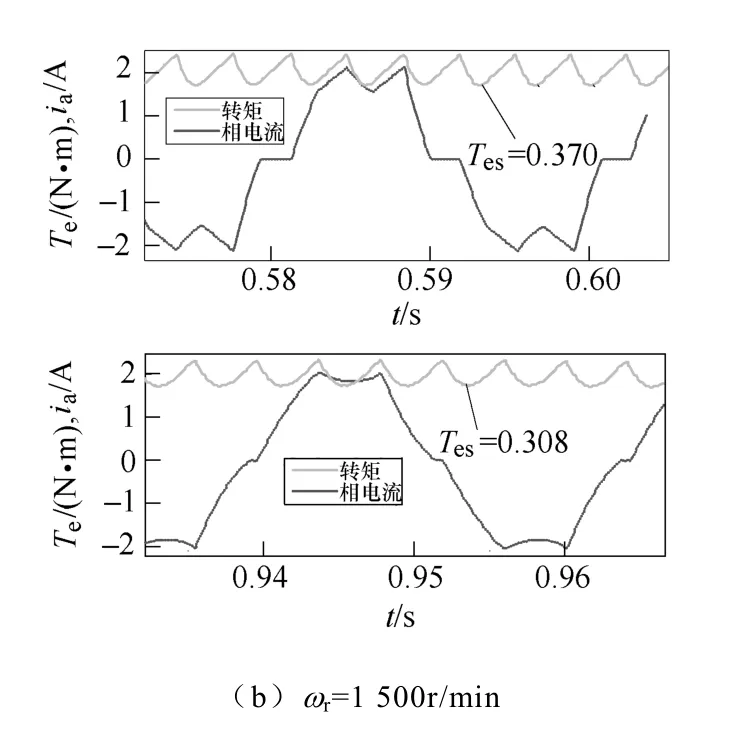
图6 不同方波电流驱动时转矩脉动对比Fig.6 Torque ripple compare in different square current

图7 非理想气隙磁通分布波形Fig.7 Non-ideal gap flux distribution waveform
由傅里叶分解方法可知,图7 所示的分布波形可以看作不同频率的正弦波合成,如式(10)所示。
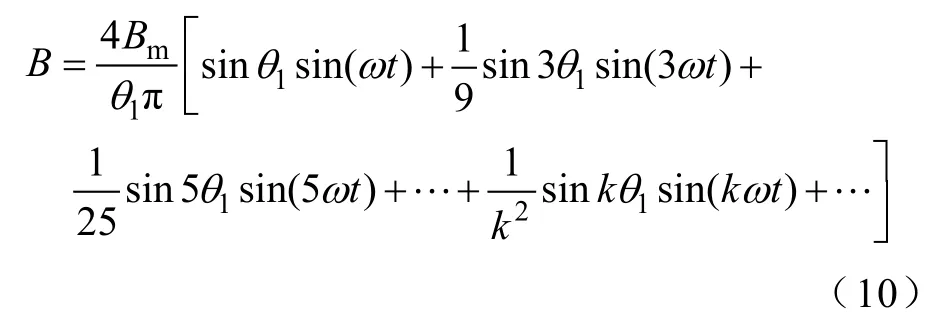
式中,k 为奇数。由式(10)可知,A 相反电动势ae为
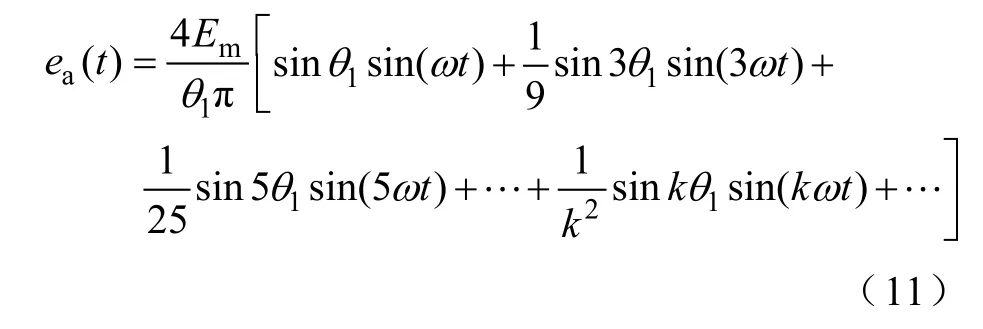
式中,Em为反电动势幅值。对于三相对称分布的BLDCM,其B、C 相反电动势be、ce 分别与ea间隔120°、240°电角度。
电磁转矩是反电动势与相电流共同作用的结果,通过对非理想反电动势的傅里叶分解可知,可将其看成是基波和谐波的组成。为了方便计算,也对理想方波电流进行傅里叶分解,以A 相相电流ai为例,因为BLDCM 三相绕组按星形对称联结,电流分量没有3 次及3 的倍数次谐波分量,其分解如下
式中,Imk=(4 I/π)/k,k 为奇数。对于B 相和C 相的反电动势和电流,因为互差120°,只需将式(12)中的 ωt换成ωt-2π/3、ωt +2π/3即可得到。
参考式(7),电磁转矩可写为

由此可知,电磁转矩的纹波转矩主要为6 次基波频率,其幅值与反电动势和相电流的谐波幅值有关。
图8 为理想方波电流驱动时与反电动势波形对应图。

图8 反电动势与相电流波形Fig.8 EMF and phase current waveforms
可以推导理想方波驱动时转矩脉动随反电动势宽度变化的公式为

图9 为不同反电动势宽度下的相电流与转矩脉动对比,从图9 可以看出,随着反电动势梯形波宽度的变窄,即使以理想方波电流驱动时,转矩脉动也会逐渐增大。

图9 不同反电动势宽度下的相电流与转矩脉动对比Fig.9 Phase current and torque ripple comparison of different EMF
1.3 BLDCM 非方波电流驱动
由以上分析可知,随着反电动势宽度的减小,方波驱动已不能有效抑制转矩脉动。由式(15)可以看出,影响转矩脉动的6 次谐波含量中包含了方波电流的5 次、7 次等谐波,如果消除这些谐波的影响,即以正弦波电流驱动时,就可以减小6 次谐波含量,从而减小转矩脉动。
由式(12)~式(14)可求得
由于其他高次谐波分量幅值较小,可忽略不计,由式(18)、式(19)可求得转矩脉动为

由 式(20)可 知,在 θ1=42°和 θ1=74°时,BLDCM 在正弦波驱动下转矩脉动可以接近零。方波电流和非方波电流驱动两种情况下的输出转矩仿真波形如图10 所示。
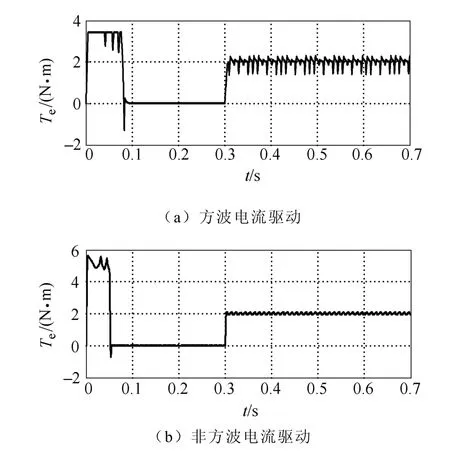
图10 两种驱动方式输出转矩对比Fig.10 The comparison of torque in different injection schemes
由图10 可以看出:非方波控制下的BLDCM 动态调速性能较好,响应迅速;六脉波方波电流驱动下的转矩脉动为0.448 3,而相同负载情况下,非方波控制下的转矩脉动仅为 0.091,即通过正弦波驱动,BLDCM 转矩脉动可以大大降低。
2 BLDCM 混合矢量驱动
2.1 不同驱动方式下的转矩性能分析
由式(13)、式(17)、式(20)得出不同驱动方式下转矩性能对比,见表1。

表1 不同驱动策略转矩性能Tab.1 Performance torque of different driving scheme
通过表1 中对不同驱动下转矩脉动理论分析推导,可以得到不同驱动方式下的平均转矩与转矩脉动理论公式,其相应的曲线如图11 所示。

图11 不同驱动下的转矩特性比较Fig.11 Performance comparison of different injection schemes in variable1θ
由图11 可知,在反电动势宽度为30°~60°的典型分布区间内,方波驱动下的转矩脉动增大较快,正弦波驱动下的转矩脉动始终为0~0.1;但方波驱动下的平均转矩输出始终比正弦波驱动下高10%。几种驱动控制方式比较见表2。

表2 几种驱动策略比较Tab.2 Performance comparison of different driving scheme
在电机起动时刻,基于60°霍尔信号无法输出准确的位置信息,而方波驱动只需要60°分辨率的较为粗略的初始霍尔信息,且方波驱动的平均转矩输出都比后两种驱动大,满足电机起动时大转矩输出要求。
在BLDCM 运行时,正弦波驱动下的转矩脉动很小,在交流电机驱动领域,正弦波矢量控制具有良好的动态调速性能,其技术已很成熟。
2.2 混合矢量驱动控制
通过上述比较分析,考虑到电动汽车实际应用与工况,在BLDCM 起动时可以方波电流驱动,在正常运行时可以正弦波矢量驱动。因此,为了保证驱动方式切换的平稳,兼顾控制系统的简单易实现原则,本文提出一种基于混合电压空间矢量的驱动控制策略。
对于电压空间矢量,有一种不连续开关调制模式[14],不同于常用的连续调制的SVPWM,这种调制方式在每一时刻有一桥臂的开关管不导通。该四开关调制模式是通过在1 个PWM 周期里,根据扇区判断逻辑选择插入u0或u7零电压矢量,而不像常规SVPWM 调制方式,插入2 种零电压矢量。所以在1 个PWM 周期里只有4 个开关操作,也称为四开关调制SVPWM。这种调制方式下的电流趋近于方波,磁链轨迹为60°间隔的正六边形,其开关损耗较连续模式下的SVPWM 减小1/3。四开关调制下的6 个非零矢量分别为
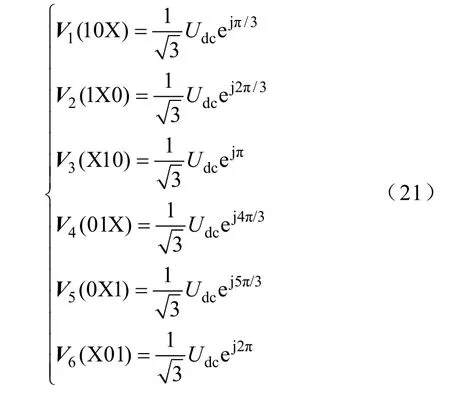
不连续调制电压矢量空间分布如图12 所示。
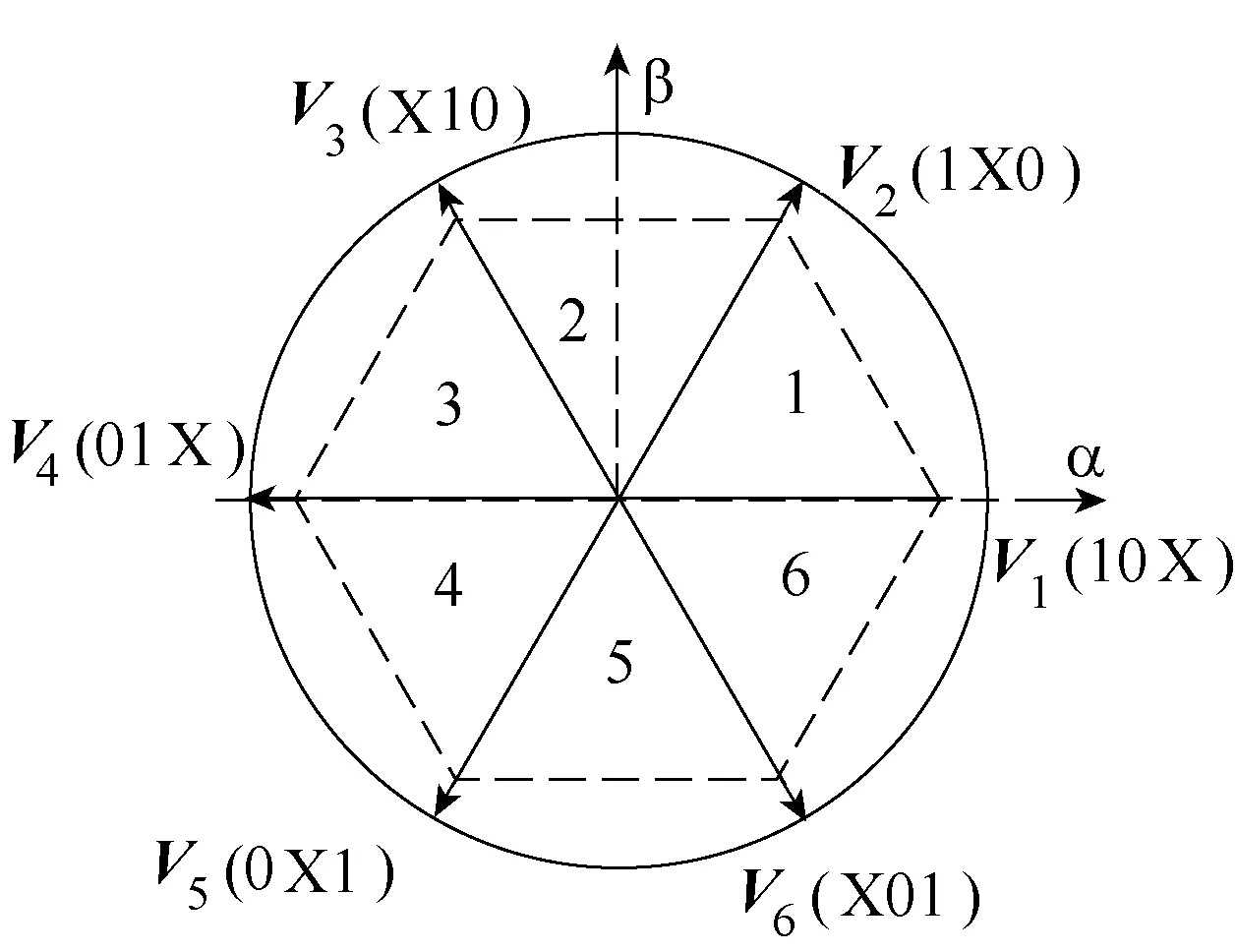
图12 四开关调制下的电压矢量空间分布Fig.12 The space vector in four switching modulation
在矢量切换时存在60°缓冲区间,不需要进行死区补偿。与连续调制的SVPWM 建立混合电压空间矢量,在由四开关调制切换为六开关连续调制时,只需在矢量控制系统下就可完成,易于实现。
对于四开关调制方式,表3 给出了根据扇区位置对应的开关管导通逻辑关系。
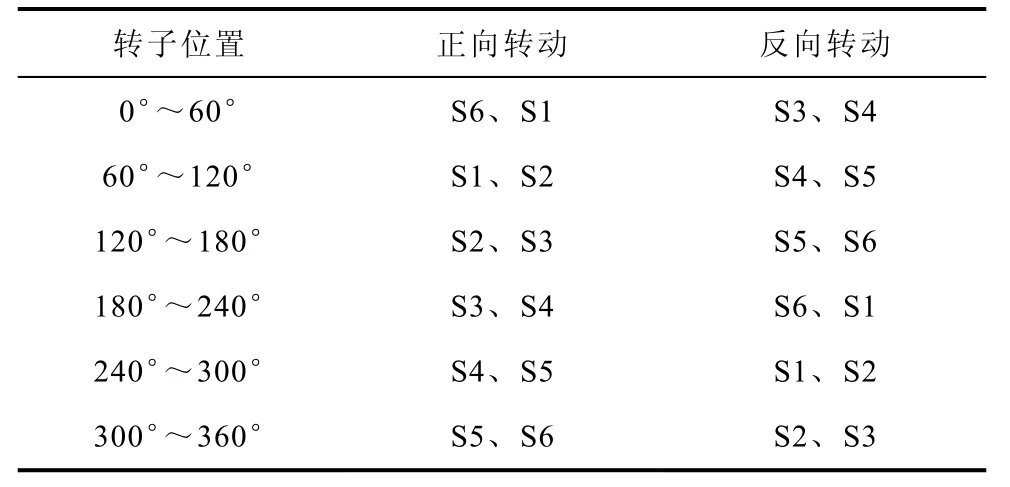
表3 转子位置与开关管导通对应关系Tab.3 Rotor position and the switch turns on the correspondence
图13 为混合矢量控制策略框图,其控制模式大致如下:通过霍尔信号检测估算转子位置和转速,混合SVPWM 模块通过输入转子转速信息来判断切换驱动方式状态(下文仿真部分给出具体的切换条件)。电机在低速起动时,驱动模式为四开关调制方波矢量驱动,该驱动模式下电机出力大、运行可靠,四开关方式和六开关方式都是按照矢量方式来控制id和iq,角度仍然采用霍尔信号检测;顺利起动后切换为六开关调制正弦波矢量控制模式,此时电机运行噪音很低,动态调速性能很好。通过下文仿真和实验可以看出此种模式切换更平滑,转矩脉动更小。
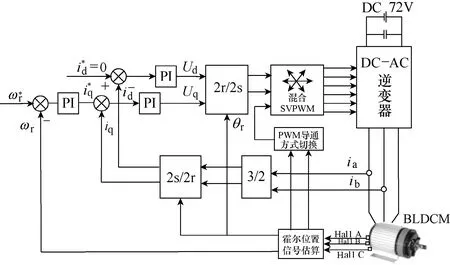
图13 混合矢量控制策略Fig.13 Hybrid vector control strategy
2.3 霍尔位置信号估算
为满足矢量控制需要的高分辨率转子位置,本文提出基于泰勒展开式的数学解算方法来估算转子位置。
对转子位置θ 表达式做泰勒展开为
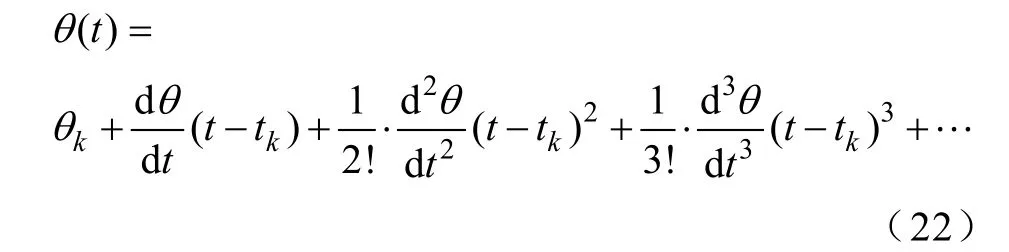
式中,kθ 为霍尔信号[15]跳变时刻对应转子位置;tk为转子在kθ 当前时刻。转子角速度为

转子角加速度为

由泰勒展开原理,一阶转子位置估计算法值理论上更接近于实际值θ,尽管阶数增加产生的代码运算量很大,却可以得到更加精确的转子位置信号。本文拟采用一阶转子位置估算算法。
由以上分析可推出一阶转子转速和位置估计算法

此外,为了抑制估算偏差的积累,需要对转子位置每60°进行重新校正。
图14 为转子位置估算对比。可以发现,在电机起动时,该算法在霍尔信号前2 个60°区间存在较大偏差,这是因为在初始时刻无法获取转子平均转速与加速度。而后混合矢量以方波驱动,只需判断霍尔信号即可,起动运行之后的估算位置信号基本上与实际转子位置保持一致,可以实现较高精度的转子位置输出。

图14 转子位置估算对比Fig.14 The real rotor position and the estimation of rotor position
3 Matlab/Simulink 仿真验证
为验证本文提出的基于霍尔传感器的混合矢量驱动方案,利用Matlab/Simulink 仿真工具搭建了控制模型。
由图15 可知,该控制模型主要由霍尔位置信号估算模块、混合SVPWM 驱动模块和BLDCM 本体模块组成,仿真电机参数见表4。
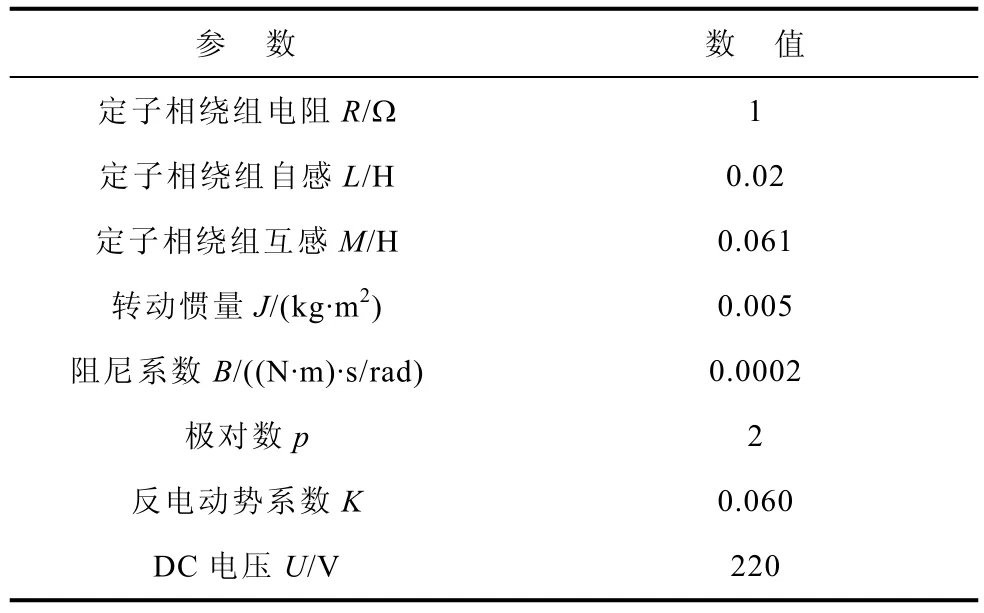
表4 仿真电机参数Tab.4 Simulation of motor parameters
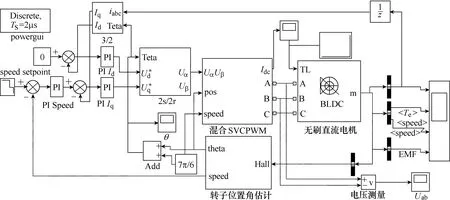
图15 混合矢量控制仿真结构Fig.15 Simulation of hybrid vector control strategy
图16 为反电动势宽度为100°下的仿真结果。混合SVPWM 模块通过输入转子转速信息来判断切换驱动方式状态,设定当转子转速超过500r/min 时切换为正弦波矢量控制,当转子转速低于480r/min时切换为方波矢量控制。由图16c 转速波形可以看出,BLDCM 在方波电流驱动下顺利起动,再切换至正弦波电流驱动,最终加速到指定转速。由图16a可看出,本文提出的混合矢量控制方案在切换时刻三相线电流没有产生突变,切换时刻转矩保持平稳。由图16b 可以看出,方波电流产生的转矩脉动较大,而正弦波电流产生的转矩脉动较小。为了尽量减少由方波驱动造成的转矩噪声,可以在电机顺利起动后马上切换至正弦波运行。
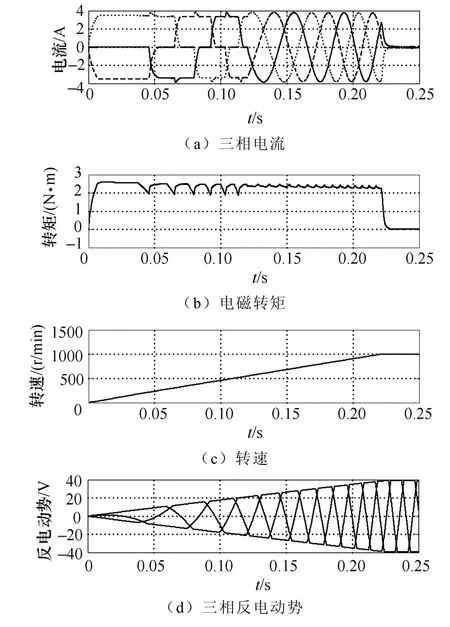
图16 混合矢量控制仿真结果Fig.16 Simulation results of hybrid vector control
4 混合矢量驱动控制策略实验验证
本文对BLDCM 混合矢量控制系统用拖台进行实验验证,实验平台如图17 所示。该实验系统由对拖电机、扭矩传感器、BLDCM、逆变驱动控制器以及实验数据显示设备等组成。实验所用BLDCM 的参数见表5。
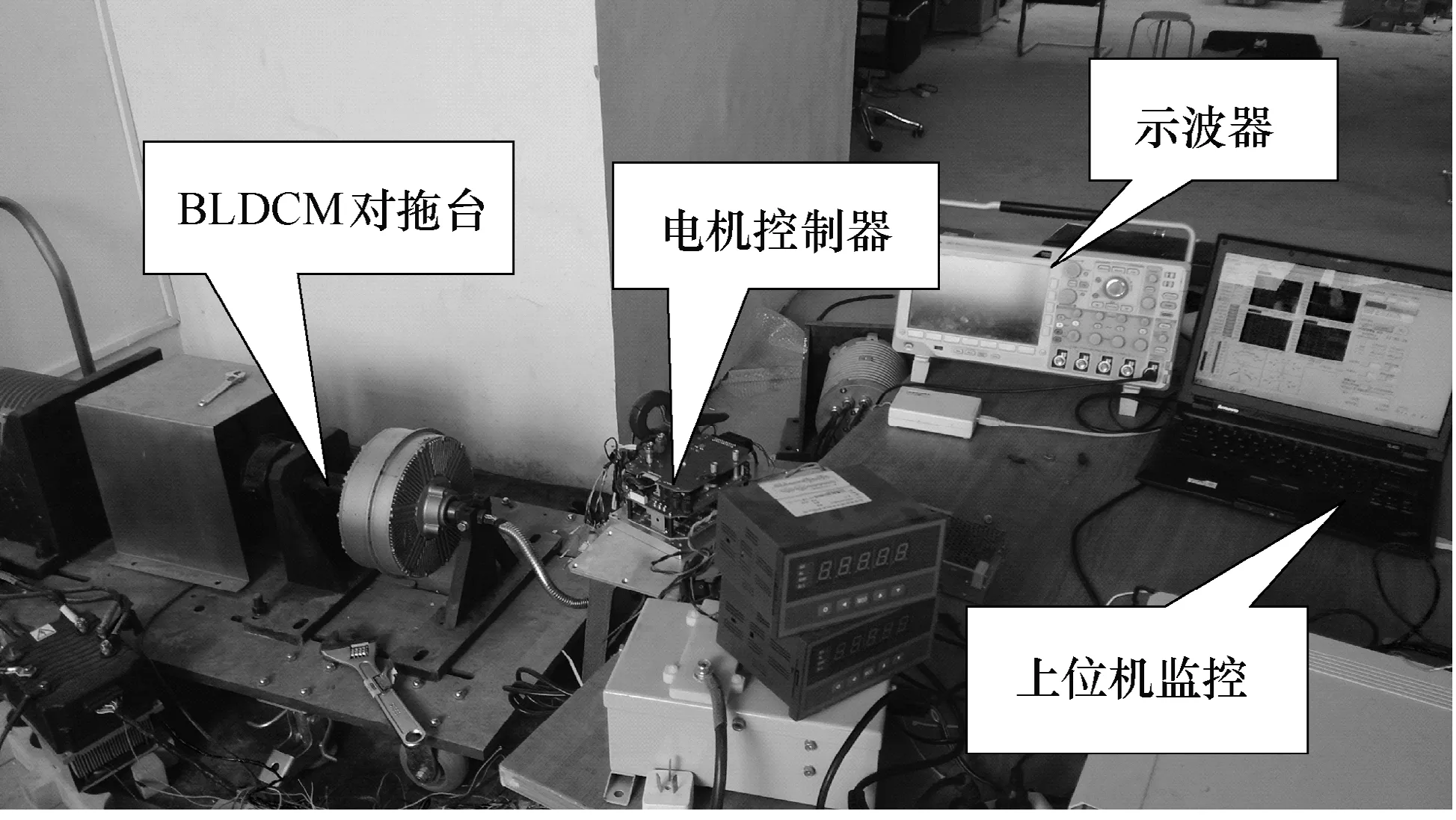
图17 实验控制平台Fig.17 Experimental test setup for evaluating the proposed method

表5 BLDCM 参数Tab.5 BLDCM parameters

(续)
图18 为DSP 对霍尔信号在线估算得到的转子位置信息。可以看出,通过该估算算法可以得到满足矢量控制需要的较精确的转子位置。

图18 转子位置在线估算Fig.18 The estimation results of rotor position online
图19 为不同工况下的相电流波形与对应霍尔信号。由相电流波形可以看出,该混合矢量控制方法实现了无刷电机方波与正弦波混合驱动。通过图19a 和图19b 的电流切换波形对比可以看出:传统的电流切换过程会造成一个很大的电流尖峰,致使转矩脉动问题严重,而本文提出的混合矢量电压调制方式能较好地解决切换过程中的电流脉动问题,电机平稳运行。由图19d 可以看出,减速运行波形在转速运行减至低速时,这种混合矢量切换也是可靠的。由图19e 的负载突变实验结果看出,转子位置估算算法可以满足混合矢量这种较大动态范围所需的精确的转子位置信息的要求,BLDCM 在混合矢量驱动策略下有较好的动态调速性能。图19f 则给出了方波驱动下反电动势与对应霍尔信号的波形。

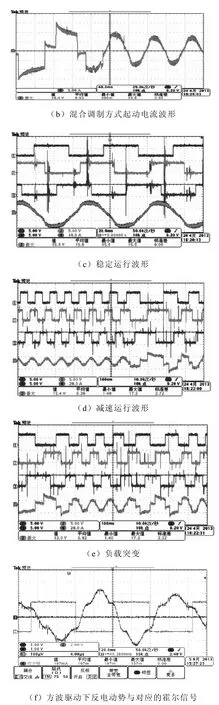
图19 不同工况下的相电流波形与对应霍尔信号Fig.19 Measured phase current under different operating conditions correspond to hall signals
5 结论
本文首先推导和分析了BLDCM 换向转矩脉动的产生机理与影响因素,并对这些影响因素逐一分析,并逐一研究了不同驱动控制策略,以减小换向转矩脉动。通过比较分析与验证,提出了混合矢量驱动控制策略,实现了低速大转矩起动与低噪音运行。实验结果证明,混合矢量驱动下的电机运行平稳、切换平滑、高效低噪。本文为电动汽车应用领域提供了一种全新的高性能、高可靠、低成本的BLDCM 驱动控制策略。
[1]Lee Kwang-Woon,Kim Dae-Kyong,Kim Tae-Duck.Commutation torque ripple reduction in a position sensorless brushless DC motor drive[C]//35th Annul IEEE Power Electronics Specialists Conference,Aochen,Germany,2004:283-290.
[2]谢杨梅.无刷直流电动机(BLDCM)转矩脉动抑制的电流跟踪型PWM 控制[J].安徽电子信息职业技术学院学报,2007,6(1):3-8.Xie Yangmei.The current tracing PWM contol of commutation torque ripple of brushless DC motors[J].Journal of Anhui Vocational College of Electrontcs &Information Technology,2007,6(1):3-8.
[3]张相军,陈伯时.无刷直流电机控制系统中 PWM调制方式对换相转矩脉动的影响[J].电机与控制学,2003,7(2):98-104.Zhang Xiangjun,Chen Boshi.The effect of PWM method for commutation torque ripple in the control system of BLDC[J].Electric Machines and Control,2003,7(2):98-104.
[4]Fang Jiancheng,Li Haitao,Han Bangcheng.Torque ripple reduction in BLDC torque motor with nonideal back EMF[J].IEEE Transactions on Power Electronics,2012,27(11):4630-4637.
[5]吴强,于飞.PWM 调制方式对六相无刷直流转矩脉动的影响分析[J].海军工程大学学报,2008,20(4):23-27.Wu Qiang,Yu Fei.The analysis of effect of PWM modulation for torque ripple of six phase DC brushless motors[J].Journal of Naval University of Engineering,2008,20(4):23-27.
[6]王晓远,傅涛,王晓光.基于电流预测控制的无刷直流电动机换相转矩脉动抑制[J].电工技术学报,2015,30(11):22-29.Wang Xiaoyuan,Fu Tao,Wang Xiaoguang.Current prediction control strategy for commutation torque ripple reduction in brushless DC motor[J].Transactions of China Electrotechnical Society,2015,30(11):22-29.
[7]Zhu L.Adaptive control of sinusoidal brushless DC motor actuators[D].Michigan:Michigan Technological University,2008.
[8]马丰民,吴正国,侯新国.基于统一 PWM 调制器的随机空间矢量调制[J].中国电机工程学报,2007,27(7):98-102.Ma Fengmin,Wu Zhengguo,Hou Xinguo.Random space vector modulation based on uniform PWM modulator[J].Proceedings of the CSEE,2007,27(7):98-102.
[9]周美兰,高肇明,吴晓刚,等.五种PWM 方式对直流无刷电机系统换相转矩脉动的影响[J].电机与控制学报,2013,8(2):82-88.Zhou Meilan,Gao Zhaoming,Wu Xiaogang,et al.The effect of five PWM method for comutation torque ripple of brushless DC motors[J].Electric Machines and Control,2013,8(2):82-88.
[10]王大方,卜德明,朱成,等.一种减小无刷直流电机换相转矩脉动的调制方法[J].电工技术学报,2014,29(5):160-166.Wang Dafang,Bu Deming,Zhu Cheng,et al.A modulation method to decrease commutation torque ripple of brushless DC motors[J].Transactions of China Electrotechnical Society,2014,29(5):160-166.
[11]Won C,Song J H,Choy I.Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[C]//IEEE 33rd Conference on Power Electronics Specialists Conference (PESC),Cairns,Queensland,Australia,2002:985-990.
[12]Kun W,Chansheng H,Zhongchao Z,et al.A novel commutation torque ripple suppression scheme in BLDCM by sensing the DC current[C]//IEEE 36th Conference on Power Electronics Specialist Conference (PESC),Recife,Brazil,2005:1259-1263.
[13]Dachin T E,Meza S,Nemes C M,et al.BLDC motor sinus driving techniques and electrical resistance evaluation[C]//IEEE International Conference on Automation Quality and Testing Robotics (AQTR),Cluj-Napoca,2012:327-331.
[14]程善美,王琰,夏丽涛,等.不连续空间矢量脉宽调制策略研究[J].微电机,2003,36(4):36-40.Cheng Shanmei,Wang Yan,Xia Litao,et al.The research of not continue pulse width modulation[J].Micromotors Servo Technique,2003,36(4):36-40.
[15]张庆超,马瑞卿,张震,等.基于霍尔位置信号的无刷直流电机电磁转矩观测[J].电工技术学报,2015,30(10):187-195.Zhang Qingchao,Ma Ruiqing,Zhang Zhen,et al.Electormagnetic torque observation of bruless DC motor based on Hall position signals[J].Transactions of China Electrotechnical Society,2015,30(10):187-195.