驼峰车辆减速器闭环控制PID参数的模糊自整定
2015-11-25杨军霞
杨军霞
(兰州交通大学自动化与电气工程学院,兰州 730070)
驼峰车辆减速器闭环控制PID参数的模糊自整定
杨军霞
(兰州交通大学自动化与电气工程学院,兰州 730070)
编组站车辆减速器是实现车辆溜放调速控制的关键设备之一,而目前使用的过程控制数学模型调速方案存在控制精度不高等缺点。现基于模糊自整定的原理,根据驼峰车辆减速器控制系统的性能和要求,提出一种按减速器调速过程对不同溜放车组的参数自整定的方法,并设计出了模糊自整定PID控制器。经过多次试验及调整,制定适合于驼峰车辆减速器控制系统的模糊控制规则,利用模糊控制策略可实现对PID参数的最佳调整。以此可以实现驼峰车辆减速器对速度的控制。
编组站;车辆减速器;模糊控制;控制精度;PID控制
驼峰车辆减速器控制系统应能够保证被控车组离开减速器的实际速度与系统要求的计算速度一致,但实际存在着较大误差[1-2]。
驼峰车辆减速器控制系统是由计算机、减速器、被控车组和测速雷达组成的闭环控制,其中校正环节(计算机)采用PID控制器。在实际控制过程中,由于被控车组参数的不确定性,且易受复杂因素的影响,运用减速器过程控制数学模型很难提高减速器的控制精度。采用纯PID控制策略很难提高减速器的控制精度,驼峰车辆减速器的速度控制误差超过3 km/h的车组还占有一定的比例[3]。而模糊控制不需要建立被控对象的数学模型,以领域专家或熟练操作人员的控制经验为依据,将智能控制算法引入PID控制器,利用智能控制中的模糊策略和模糊推理机制实时对PID三个参量进行最佳调整。该控制器对被控对象的参数和环境变化有很强的适应能力,能够满足减速器的控制精度在要求的范围之内,使系统达到预期的功能和效果[4-5]。
1 模糊自整定PID控制器的原理
模糊自整定PID控制器是以被控车组离开减速器的速度偏差e和速度偏差变化率ec作为输入,使之可以达到任意时刻的速度偏差e及其变化率ec对控制器参数的需求。利用模糊理论在线对PID参数进行校正,改善系统的性能[6-7]。其原理结构框图如图1所示。
PID参数的模糊自整定的基本原理是:实时监测在不同时刻中PID的3个参数与速度偏差e和速度偏差变化率ec之间的对应关系,再将其模糊化后得到E和EC,根据现场实际经验制定控制策略以此达到推理机制,最后将所得模糊量进行精确化,可得到Kp、Ki和Kd三个参量的精确值。如此反复,以满足在不同状态下控制器参数的不同要求,而使被控车组的速度能够到达给定速度的控制要求[8]。
在被控车组受减速器控制的过程中,Kp、Ki和Kd的模糊量可表示为
(1)
式中,F(·)表示模糊运算。整个模糊自适应PID控制器可表示为
(2)
被控过程对参数Kp、Ki和Kd的自整定要求从式(2)可归结如下。
(1)当被控车组离开减速器的速度Vs与计算机给定的速度Vj之间存在较大的误差时,为使减速器的过程控制系统具有良好的跟踪性能,应该取比较大的Kp和比较小的Kd,同时为避免减速器控制系统响应出现比较大的超调,应该限制积分作用,一般取Ki=0。
(2)当被控车组离开减速器的速度Vs与计算机给定的速度Vj之间的误差中等大小时,为使减速器的过程控制系统响应具有较小的超调,Kp应该尽量取小,Ki和Kd的取值可适中。
(3)当被控车组离开减速器的速度Vs与计算机给定的速度Vj之间的误差比较小时,为使系统具有良好的稳定性,Kp和Ki应该取比较大的值,同时为了避免减速器的过程控制系统在设定值附近出现较大的振荡,并考虑其抗干扰性能,当速度误差|Vs-Vj|的变化较小时,Kd应取较大的值;当速度误差|Vs-Vj|变化较大时,Kd应尽量取较小的值。
2 模糊自整定PID控制器的设计
本文采用的控制器为2I3O的形式,两个输入分别为被控车组的速度偏差量和速度偏差变化量经模糊化的语言变量E和EC,3个输出分别为Kp、Ki和Kd。具体设计如下[8]。
2.1 建立语言变量的赋值表
速度偏差E和速度偏差变化率EC的赋值表分别如表1、表2所示。
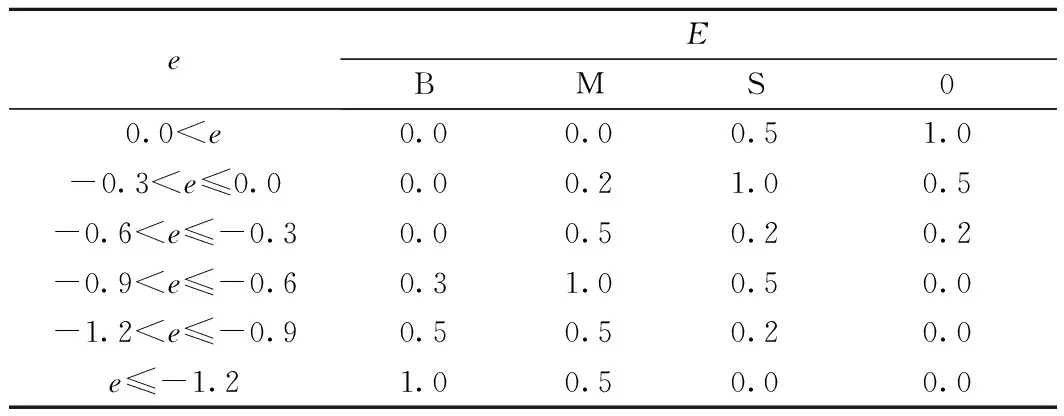
表1 语言变量E赋值
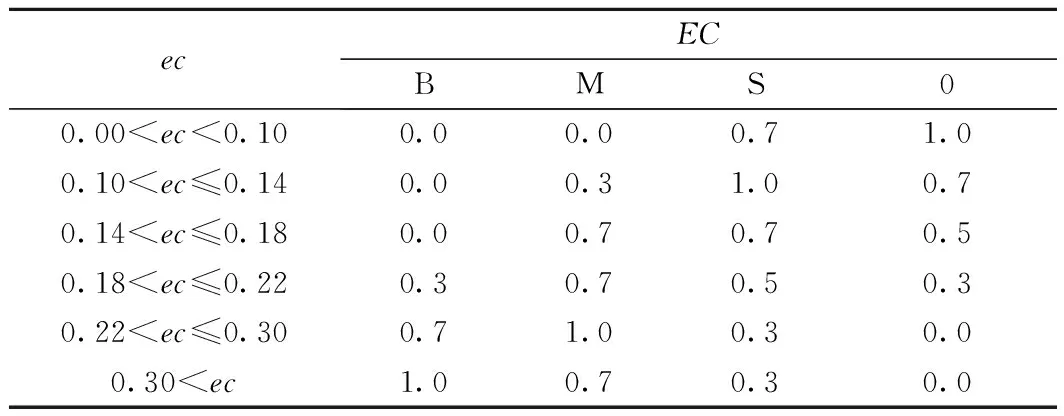
表2 语言变量EC赋值
2.2 建立模糊规则表
模糊控制设计的核心是建立针对Kp、Ki和Kd三个参数的模糊控制规则表,分别如表3、表4、表5所示。
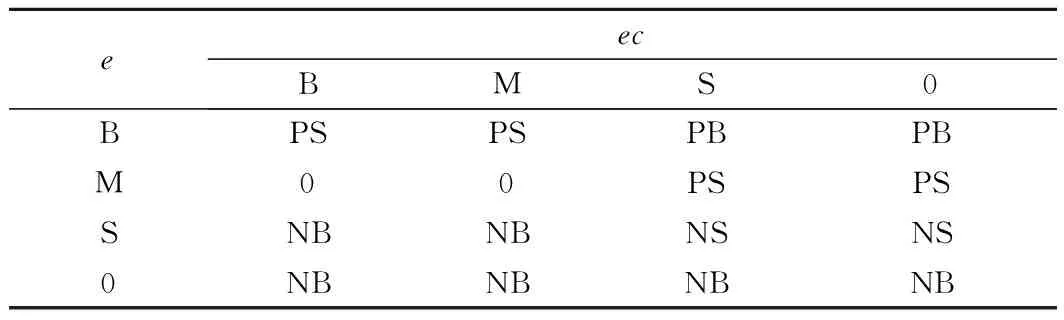
表3 Kp的模糊规则
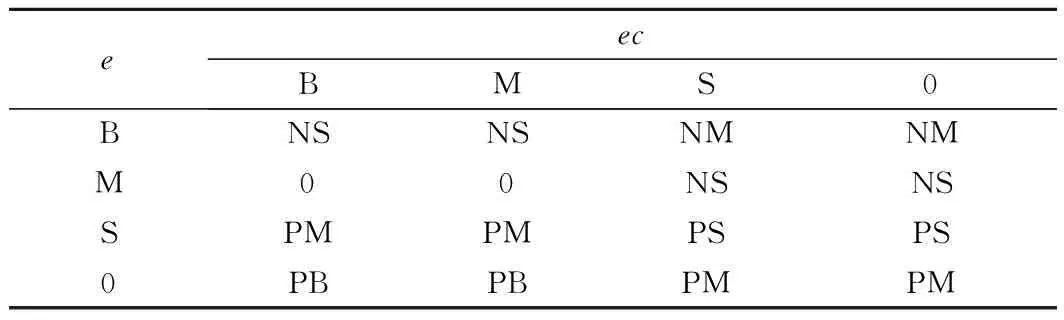
表4 Ki的模糊规则
2.3 解模糊
由模糊规则推理得出的结果是一个模糊量,而PID算法要求有一个确定的值才能去控制减速器,这里采用重心法对模糊量进行解模糊,可表示为
(3)
式中,ui为输出模糊集合U中的各个元素;μU(ui)为与其相对应的隶属度;u0为用重心法求得的精确值。
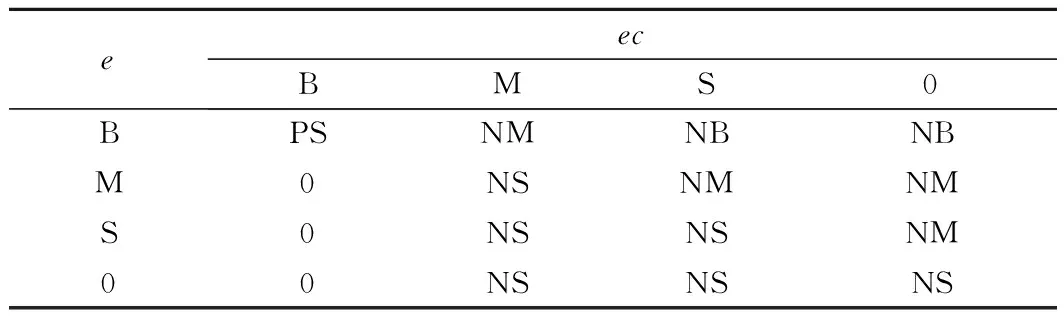
表5 Kd的模糊规则
在实际的控制过程中,首先采样当前的溜放车组实际的速度Vs和计算机给定的速度Vj,计算速度误差和误差变化;然后根据计算的误差和误差变化,从查询表中查找相应的校正量ΔKp、ΔKi和ΔKd;最后计算Kp、Ki和Kd的输出量,控制减速器的制动或缓解。
3 试验及结果分析
选择TW-2型驼峰自动化系统,按减速器的作用可分为间隔调速和目的调速,间隔调速位为一、二部位减速器,其目的是对溜放车组的速度进行调整来保证某个间隔;目的调速位为三、四部位减速器,其目的是提高减速器的控制精度,使溜放车组在预定的停车点停车。本文将三部位减速器控制软件中的常规PID控制器改为模糊自整定PID控制器[9-10]。图2为常规PID算法和模糊自整定PID算法在系统输入一个0.36的阶跃响应时的输出响应曲线。常规PID算法在稳定后,其曲线发生了震荡,模糊自整定PID算法在稳定后,其曲线并没有震荡,而且缩短了驼峰车辆减速器控制系统达到稳定的时间[11-12]。
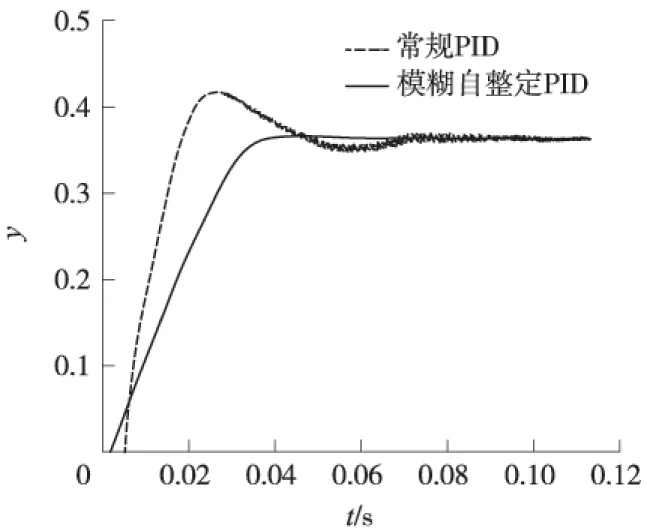
图2 常规PID算法和模糊自整定PID算法的控制效果
常规PID控制器与模糊自整定PID控制器在三部位减速器速度控制误差的分布情况如表6所示。

表6 TW-2型驼峰自动化系统三部位减速器控制误差的分布情况 %
从表6的数据结果可以看出,模糊自整定PID控制器能够有效地降低减速器过程控制的误差,减速器的控制精度有了明显的提高。其中最明显的是将大于3.0 km·h-1所占的百分比降至0.7%,显著地提高了被控车组的安全连挂率。
根据以上数据试验结果可以发现,与现有经典控制理论相比较,基于模糊自整定的PID控制具有适应不同溜放车组速度控制的能力,驼峰车辆减速器的控制精度有明显的提高,从而提高驼峰的解编能力,提高钩车的安全连挂率,降低成本,减少工人的劳动强度,控制系统的性能得到改善。
[1]沃华欧.驼峰车辆减速器闭环控制PD参数模糊在线自校正[D].北京:中国铁道科学研究院,2007:117-120.
[2]姚精明.驼峰间隔调速智能控制研究[D].北京:铁道部科学研究院,2001.
[3]徐万安.驼峰车辆溜放速度智能控制的研究[D].北京:铁道部科学研究院,1999.
[4]李岱峰,郭祥熹,张 朴,等.T·JK T·JY系列车辆减速器[M].北京:中国铁道出版社,2002.
[5]吴芳美.编组站调车自动控制[M].北京:中国铁道出版社,2009.
[6]曾光奇,胡均安,王东等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2000.
[7]林超力,刘鸿飞,孙惠军,等.模糊自适应PID算法在核磁共振谱仪样品旋转控制系统中的应用[J].分析化学,2011(4):506-510.
[8]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010:10-15.
[9]房俊全,朱从乔.柴油机调速系统的模糊自适应PID控制[J].微计算机信息,2005(15):55-56.
[10]薛晓兵.驼峰速度控制的算法及软件开发[D].北京:清华大学,2009.
[11]吴振顺,姚建均,岳东海.模糊自整定PID控制器的设计及其应用[J].哈尔滨:哈尔滨工业大学学报,2004(11):55-56.
[12]白瑞祥,陈晓艳,费春国.模糊自适应PID控制及控件实现[J].分析化学仪器仪表学报,2003(S):583-585.
Fuzzy Self-tuning of PID Parameters for Hump Yard Retarder Feedback Control
YANG Jun-xia
(School of Electrical Engineering and Automation, Lanzhou Jiaotong University, Lanzhou 730070, China)
Retarder is one of the most important equipment to achieve precise control of truck speed in marshaling yard. However, the mathematical speed control model for process control system has some shortages with low control precision. So, based on the principle of parameter fuzzy self-turning PID and the performance and requirements of retarder control system, a new control method and PID controller is designed to control different kinds of trucks at different speed levels. Moreover, the best fuzzy control rule that adapts to the hump retarder speed control system is worked out after many tests and adjustments. The fuzzy control concept can be employed to offer optimized PID parameter adjustment so that the precise control of hump truck speed can be controlled.
Marshaling yard; Retarder; Fuzzy control; Accuracy of control; PID control
2015-01-12
杨军霞(1989—),女,硕士研究生,E-mail:yangjunxia1234 56@163.com。
1004-2954(2015)09-0156-03
U284.63
A
10.13238/j.issn.1004-2954.2015.09.035