浑水中船舶水下观察检测技术初探
2015-11-25张文瑶郦智斌91872部队上海200083
张文瑶,郦智斌(91872部队,上海 200083)
浑水中船舶水下观察检测技术初探
张文瑶,郦智斌
(91872部队,上海 200083)
文章主要开展了水下多波束成像观察检测技术研究,采用多波束声呐成像、声透镜声呐成像和局部清水成像方法,在浑水水域,对船舶目标进行了实船水下观察检测,从而构建了船舶浑水条件下水下观察检测体系。
水下检测;声呐成像;船舶
在我国东海地区、长江流域和江河入海口等浑水区域,常规的水下照相、摄像等水下观察检测是无法进行的,水下微光摄像、水下激光成像等设备的使用也是有限的,浑水条件下水下观察检测是世界公认的水下作业难题之一。多波束成像检测技术,与传统的单波束检测系统相比,具有扫幅宽、全覆盖、高效和高精度的特点,它的诞生对声学探测技术的发展具有划时代的意义,是解决浑水条件下观察检测的有效技术手段。
1 水声成像检测技术
声波是迄今为止水中最有效的信息载体。高分辨率成像声呐是在浑浊水域对水下目标以及环境进行成像检测的最有效手段。
虽然声呐技术的不断发展使得成像声呐的分辨率等技术指标不断提高,但是由于信息载体和传输介质的差别,声呐图像与我们熟悉的光学图像相比,仍然具有分辨率低、噪声和混响干扰强、目标边缘模糊不清等特点,给水下目标的检测带来巨大困难。因此一个完整的船舶成像检测平台,除了要有较高分辨率的成像声呐设备,还必须配有声呐图像处理模块,依托声呐图像处理技术改善获取的原始图像的质量,或者在特定需求背景下提取并识别可疑目标,以提高观察检测的效果。
按照水下声学成像系统的探测范围可把水下声学成像系统分为2大类。
第1类就是用于大面积、大深度扫海测量的水声成像系统,主要包括多波束测深系统、侧扫声呐系统和合成孔径声呐系统等。
多波束声呐系统(MBES)以获取海底测点的高精度平面位置和水深为主,以获取图像信息为辅。现代侧扫声呐系统(SSS)在成像的同时也可给出同多波束声呐系统一样但位置精确度较差的全覆盖水深,但以获取高分辨海底图像为主,以测深为辅[1]。
第2类是用于对近距离、小范围区域进行成像的水声成像系统,称为微地貌探测系统,主要包括前视声呐系统、声透镜系统等。
前视声呐最初的用途是避障,主要用来保证水面船只、AUV和潜艇的航行安全,大部分水面船只和几乎所有的水下潜器都安装有前视避障声呐系统。应用较多的主要是美国RESON公司的SeaBat系列产品,例如SeaBat 8128、SeaBat 7128(见图1)、SeaBat 6012等。
声透镜系统利用声透镜对声波的聚焦原理与光学透镜对光波的聚焦原理相同,可以获得类似于光学成像的图像。我们选用DIDSON 300 m(见图2)进行近距离水下观测实验。

图1 SeaBat 7128多波束前视声呐

图2 DIDSON 300 m实物照片
2 声呐成像对浑水中船舶等的观察检测
20世纪70年代末多波束测深技术出现以来,在海底地形测量和江河湖泊水下测绘中都得到了广泛应用。不仅实现了测深数据自动化和在外作业准实时绘制测区水下彩色等深图,而且还可利用多波束声信号成像,提供直观的测时水下形态,如探测水中鱼雷、中华鲟、沉船、大坝水下探伤和检测船舶吃水深度等。
我们采用SeaBat 7128多波束前视声呐和DIDSON透镜声呐,对浑水中的船舶进行了水下观察检测试验研究,以期解决浑水条件下船舶水下观察检测难题。
2.1SeaBat7128多波束前视声呐观察检测情况
SeaBat 7128声呐系统由连接控制单元(LCU)、7-P声呐处理单元(SPU)、EM7200双频接收单元、TC2162双频发射单元和水密电缆等5部分组成,参见图3。
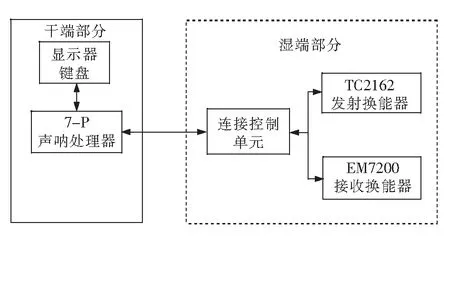
图3 SeaBat 7128组成图
2.1.1 实验室观测实验
在开展以上声呐图像处理技术理论研究的同时,本项目利用从国外购买的美国RESON公司生产的SeaBat 7128多波束成像声呐,开展了不同距离、不同水深和不同角度下的实验室观测研究。
实验环境为室内水池(长8 m,宽8 m,深10 m);实验设备为SeaBat 7128 多波束前视声呐;目标类型为浮梯(长5 m,宽1 m)。图4为部分典型探测成像结果。
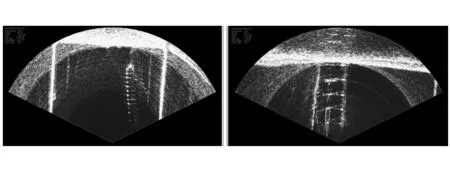
图4 SeaBat 7128探测距离8 m成像结果图
实验表明,SeaBat 7128多波束成像声呐能够对距离1~5 m、水深1~10 m的不同角度下的目标进行有效观测,但是目标与声呐头之间的相对角度会对观测结果带来影响。
2.1.2 实船观测试验
采用SeaBat 7128多波束成像声呐进行了浑水条件下的码头实船观测实验,实验环境及观测结果见图5、图6。

图5 实验环境示意图
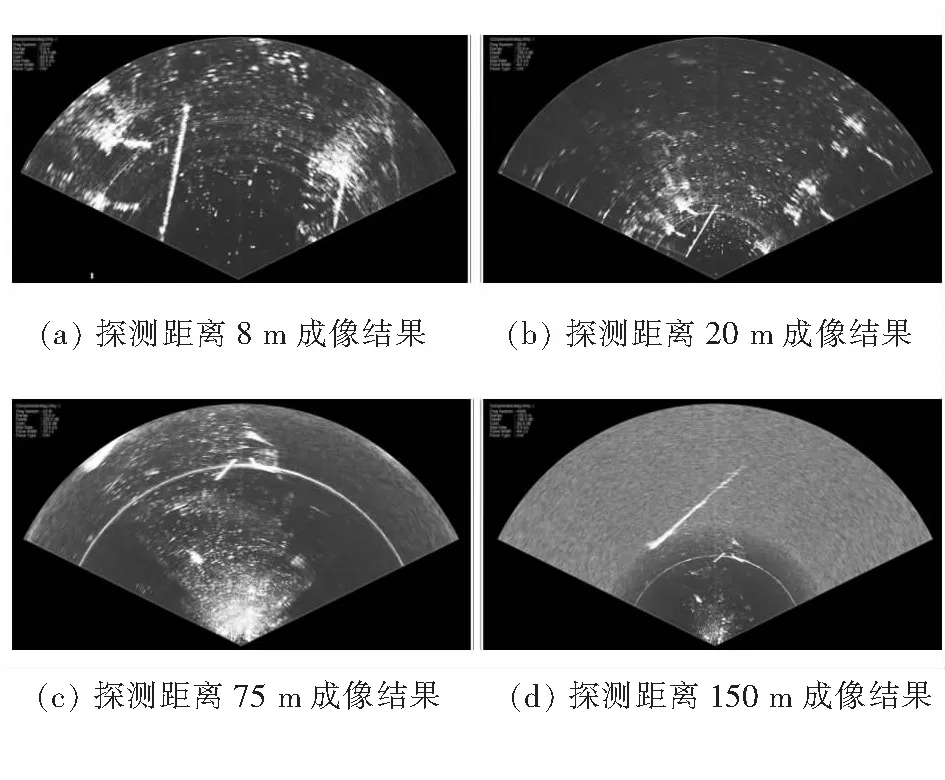
图6 SeaBat 7128多波束成像声呐码头观测结果图
实验结果表明,SeaBat 7128多波束成像声呐能够在浑水条件下对距离8~150 m、水深1~10 m的不同角度下的目标进行观测。对于喷泵和螺旋桨目标,有效观测距离可以达到100 m以上;当目标距离小于20~30 m,可以检测并识别出喷泵和螺旋桨目标。
2.2DIDSON透镜声呐观察检测情况
观察分析SeaBat 7128多波束成像声呐获取的图像,不难看出:在浑水条件下,其用于大范围搜寻和发现目标更为有效,近距离观测目标的详细信息则受各种条件的限制。理论上说,它可以在一定范围内对家用墙砖大小的物体进行准确识别,但实际应用中,对不同材质和特殊形状的未知目标,很难达到理想的观察效果,近距离观测目标透镜声呐更为有效。
DIDSON 使用声学透镜技术,可以说是一台水下声学摄像机,可以形成清晰的物体图像,具有体积小、重量轻、可由潜水员携带,可用于蛙人、鱼群、漂浮物等水中目标的探测、显示与记录;水雷等水底目标的探测、显示与记录。
在同样条件下,用DIDSON透镜声呐进行比较实验,可以较清晰地观测到螺旋桨等实验目标,成像效果明显优于SeaBat 7128多波束成像声呐。
图7为实验室试验观测到的水下平台金属网格声呐成像照片,图8为实船实验观测到的船舶螺旋桨声呐成像照片。
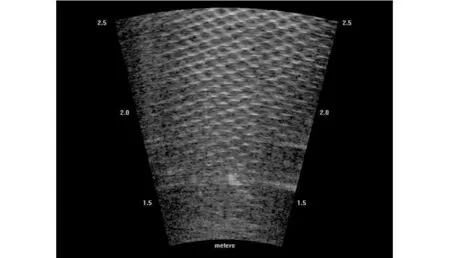
图7 水下平台金属网格声呐成像图

图8 船舶螺旋桨声呐成像图
3 声呐图像后处理技术
水下环境中的噪声干扰和混响干扰、海洋内部的不均匀特性都会使成像声呐接收的原始声图像数据的质量急剧降低,因此,在实际应用中,需要采用声呐图像后处理技术,才能获得几乎可以和水下光学摄像机相比拟的图像效果。同时,为了保证后期目标识别的准确性,也有必要进行适当的图像处理和分析。
3.1声呐图像特点
声呐图像实质上是接收的声回波能量在平面内的分布,属于二维空间信号,这一点与光学图像类似;但是,各种外在因素的影响使声呐图像的质量远不如光学图像。
1)声呐图像受噪声影响严重,对比度较低。水下复杂的环境中,海洋环境噪声、舰船自噪声等是普遍存在的,这些噪声在声呐图像中表现的灰度级比较丰富,而目标灰度级相对较少。
2)海洋中大量存在的悬浮颗粒、不均匀结构等使声波发生散射,一定程度上也影响了声波的传播距离及成像质量,使声呐图像强度非均匀,某些物体边缘被弱化。
3)受声基阵性能的限制,声呐图像的分辨率往往不高。
3.2声呐图像处理算法
声呐图像的这些特点给后续处理带来许多困难,需要合理选择声呐图像处理算法。根据处理目的不同,目前的声呐图像处理算法可大致分为预处理、图像分割、目标特征提取与识别。
这几类算法通常需要配合使用来达到理想的处理效果,例如进行图像分割之前大都需要对原始图像进行去噪处理,提高图像信噪比目标特征的正确提取则建立在图像合理分割的基础上。
实际研究过程中,我们在MATLAB环境下,将适用于浑水中舰船水下观察检测的图像处理方法整合并制作了图像处理软件,作为多波束声呐图像后处理的平台,对声呐图像进行后续处理,正确评估船舶水下技术状况。
4 局部清水观察检测
用现有的声呐成像设备是难以观察检测船体、螺旋桨和舵等水下装置表面焊缝、裂纹等。在相同浑水水域,我们采用在摄像或照相装置前加装清水箱或清水袋等装置形成局部清水检测系统,对船体、螺旋桨和舵等水下装置表面焊缝、裂纹等细节进行紧贴装置表面检测,从而获得光学图像信息。从拍摄到的船体表面光学成像图像观察,焊缝清晰可见。
5 结束语
多波束声呐成像系统是目前水下地形测量的最主要海洋仪器之一,是主要用于大面积、大深度扫海测量的水下声呐成像系统;声透镜系统利用声透镜对声波的聚焦原理与光学透镜对光波的聚焦原理是一样的,可以得到类似于光学成像的图像,是用于近距离、小范围区域进行成像的水下声学成像系统。
通过大面积、大深度扫海测量声呐成像系统(如:Seabat 7128)和近距离、小范围区域进行成像的成像系统(如:透镜声呐)的研究,解决了在宽阔水域(特别是浑水水域)远距离目标发现,近距离目标观察的难题,配合水下摄像机(照相机或ROV)采用局部清水法贴面检测船体(或螺旋桨等水下装置)表面裂纹等状况,由此构建了水下(特别是浑水条件下)远距离、近距离和贴近表面一整套检测体系,可有效解决船舶水下浑水观察检测难题。
水声成像技术不仅可以在浑水条件下对在航船舶水下观察检测中应用,而且在水下探测领域中,对水雷、蛙人、水下潜器等静止和运动目标的大范围搜寻、检测识别和定位跟踪等领域也具有广泛的应用前景。
[1]阳凡林,吴自银,独知行,等.多波束声呐和侧扫声呐数字信息的配准及融合[J].武汉大学学报,2006,31(8)740-743.
This paper mainly studied the application technology of underwater multi-beam imaging observation.Methods of multi-beam sonar imaging, acoustic lens sonar imaging and local clear water imaging are used.In the muddy water,the underwater observation and detection of the ship target are carried out in order to build a system of ship launching on detection of muddy water conditions.
underwater detection;sonar image;ship
U672
10.13352/j.issn.1001-8328.2015.06.011
张文瑶(1963-),男,辽宁抚顺人,高级工程师,大学本科,主要从事舰船维修保障工作。
2015-08-26
