Control of Vehicle Active Front Steering Based on Active Disturbance Rejection Feedback Controller
2015-11-24SangNan桑楠WeiMinxiang魏民祥BaiYu白玉
Sang Nan(桑楠),Wei Minxiang(魏民祥),Bai Yu(白玉)
1.College of Energy and Power Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China;
2.College of Mechanical and Electrical Engineering,Changzhou Institute of Technology,Changzhou 213002,P.R.China
Control of Vehicle Active Front Steering Based on Active Disturbance Rejection Feedback Controller
Sang Nan(桑楠)1,2*,Wei Minxiang(魏民祥)1,Bai Yu(白玉)2
1.College of Energy and Power Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China;
2.College of Mechanical and Electrical Engineering,Changzhou Institute of Technology,Changzhou 213002,P.R.China
A control method of active front steering(AFS)based on active disturbance rejection technique was proposed for solving the model nonlinearity and parameter decoupling control in the traditional control methods.The AFS controller consists of the proportional and derivative(PD)feed-forward controller and the active disturbance rejection feedback controller.To improve the steering response characteristics of a vehicle,a PD controller is designed to realize variable steering gear ratio,and to enhance the safety of vehicle when steering.An active disturbance rejection controller(ADRC)is designed to follow the expected yaw rate of the vehicle.According to the input and output of system,extended state observer(ESO)of ADRC can dynamically estimate internal and external disturbance of the system,thus easily realizing the model nonlinear and parameter decoupling control.The AFS controller is simulated and validated in Matlab and CarSim.The simulating results of double lane change(DLC)test and pylon course slalom(PCS)test show that the ADRC can well control the vehicle model to complete the road simulation test of DLC and PCS with small path tracking error.The simulating results of angle step test of steering wheel show that the vehicle under the control of ADRC demonstrates good lateral response characteristic.The controller regulates a wide range of parameters.The model has less precision requirements with good robustness.
active disturbance rejection technique;active steering;variable ratio;extended state observer
Nomenclature
m/kg Mass of vehicle
1z/(kg·m2)Moment of inertia about Z-axis
k1/(N·rad-1)Front axle cornering stiffness
k2/(N·rad-1)Rear axle cornering stiffness
lf/m Distance between CG and front axle
lr/m Distance between CG and rear axle
δsw/rad Steering wheel angle
δFF/rad Steering wheel angle of feedforward
δFB/rad Steering wheel angle of feedback
δp/rad Out angle of planetary gear trains
θac/rad Angle of active front steering motor(actuator)
θp/rad Angle of 6-gear
δf/rad Steer angle of front wheels
niTeeth of i-gear
ψ/(rad·s-1)Yaw rate
ψd/(rad·s-1)Yaw rate of reference model
β/rad Sideslip angle of vehicle centre of mass
βd/rad Sideslip angle of reference model
G Mechanical steering gear ratio
ux/(m·s-1)Longitudinal velocity
g/(m·s-2)Acceleration due to gravity
0 Introduction
The traditional steering system completes the steering through the intervention of the driver. Therefore,it has the disadvantages of slow response speed,the incapability of correcting the driver's wrong operations,the helplessness in satisfying small gear ratio requirements at low speedand large gear ratio requirements at high speed,namely the so-called light and flexible contradiction.Owing to the small variation of gear ratio of traditional steering system,the steering characteristics of vehicle have nonlinear relations with vehicle speed.Therefore,the driver needs to constantly revise the vehicle direction to adapt to the steering characteristics of the vehicle so as to control the vehicle along the driver's desired track,which increases the driving burden and decreases the operability of the vehicle.Hydraulic power steering(HPS)or electric power steering(EPS)can change the transfer characteristics of steering force,but cannot change those of steering angle. Therefore,the problem that the vehicle steering characteristics change with the vehicle speed still exists.Active steering system was developed on the basis of power steering system,which includes active front steering(AFS),4 wheels steering(4WS)and steering by wire(SBW),etc. A variable gear ratio(normalized steering gear ratio)can be realized by controlling the input of the active steering motor to get better steering performance,thus improving the handling and stability of vehicle and enhaning driving safety[1,2].
The light and flexible contradiction can be solved by variable ratio of active steering.Based on the state of the vehicle,an additional angle is applied to the front wheels for changing the lateral force to ensure that the lateral dynamics meet the requirements.According to yaw rate and sideslip angle,the feed-forward controller implements abasic variable ratio rule based on vehicle speed,and the feedback controller adjusts wheel angle[3]. Steer gain(yaw rate gain or lateral acceleration gain)is invariable with velocity[4,5];The variable ratio rule is amended based on invariable steer gain,and it is controlled by speed[6].In fact,nonlinear characteristics of the tire,the vertical load and the suspension compliance will influence the actual angle of front wheels and change the relation between gear ratio and speed,so as to affect the vehicle steering characteristics.In this paper,basic variable gear ratio is realized by using proportional and derivative(PD)feed-forward control,and the desired yaw rate is followed by using the active disturbance rejection control[7]. Known to the steering input and the output of vehicle(e.g.,steering angle,yaw rate,lateral acceleration,speed),active disturbance rejection controller(ADRC)can dynamically track targets. In order to verify the effectiveness of the proposed control methods,the drivers'commands are given by a single-point preview driver model and the driver-vehicle-road closed-loop control model is established in Matlab software.The Car Sim vehicle model is controlled by this driver model to complete the road simulating test of high-speed double lane change(DLC)and pylon course slalom(PCS).
1 Variable Ratio Steering System Configuration and Model
1.1 Variable ratio steering system configuration
After adding the planetary gear mechanism in HPS or EPS,the variability of steering gear ratio was implemented by superposition of the movement of steering wheel and active front steering motor.Such system[8]was first applied in the BMW 5 series.The configuration of the variable ratio steering system is shown in Fig.1.
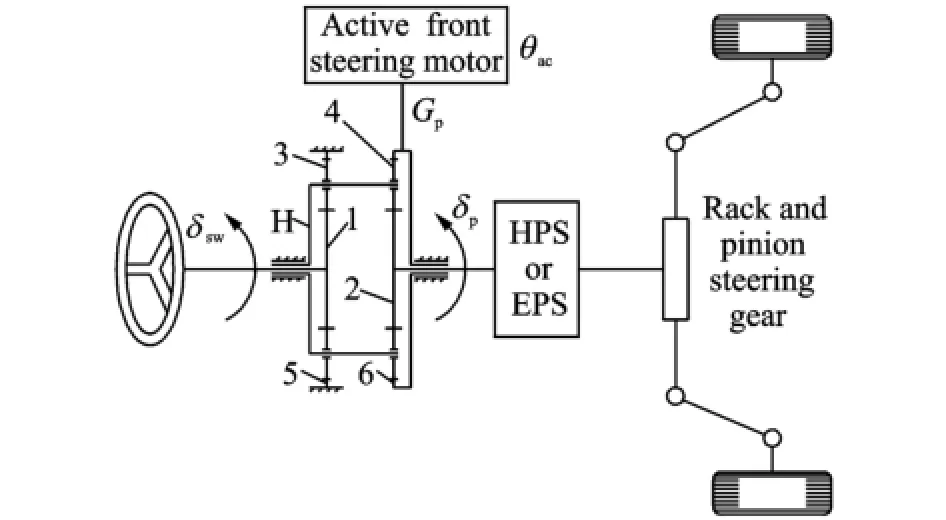
Fig.1 Variable ratio steering system configuration
As shown in Fig.1,while the steering system is working,the rotating direction ofδpand δsware the same,where Gpis the reduction ratio of motor and part 6,Gp=θac/θp.Compound gear train has double row planetary gear train,including sun gears(part 1,2,5,6),planet gears(part 3,4)and planet carrier(part H),among which 5-sun gear is fixed.1-3-H-5 is an elementa-ry epicyclical gear train,2-4-H-6 is a differential gear train,the system degree of freedom(DOF)is 2,and the outputδpis determined byδswandθp. The relation amongδp,δswandθpsatisfies

From Eq.(1),δpcan be expressed as

In this system,the mechanical steering gear ratio G was set to 17.The front wheel angleδfequals toδp/G andαequals to n5/n1,then the vehicle steering gear ratio is defined as

Whenθp=0,thenδp=δsw,the steering gear ratio i is constant.Active steering system becomes a constant ratio steering system.Whenθp≠0,i is determined by the values ofθp/δswas expressed in Eq.(3).Using the steering system as Fig.1,steering variable gear ratio can be realized by controlling the inputθpor the actual control inputθac.
Variable gear ratio can be realized by the active front steering shown in Fig.1,and its control algorithm is shown in Fig.2.According to the driver's input and vehicle speed,feed-forward controller calculates feed-forward steering wheel angleδFF.According toψd,βd,ψandβ,feedback controller calculates feedback steering wheel angle δFB.Feed-forward control algorithm is actually a proportional&derivative(PD)algorithm,and feedback control algorithm is an active disturbance rejection algorithm.In addition,one of the effects of the active steering control is that the response characteristic of the vehicle is changeable.This function is realized by feed-forward controller of the steering control,and the detailed algorithm will be described in Section 1.2.Another effect of the active steering control is that the vehicle response is less than the safety threshold.This function is realized by the feedback controller of the steering control,and the detailed algorithm will be described in Section 2.4.
1.2 Basic variable gear ratio control
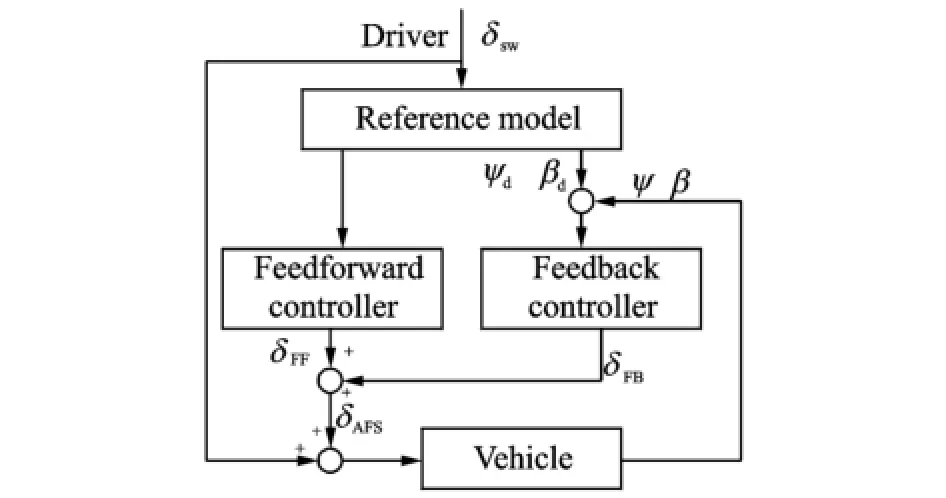
Fig.2 Vehicle active steering control algorithm
The active front steering control system is designed to realize the functions mentioned above. The steering angle of the front wheel is determined by the driver and the actuator(motor). This angle can be controlled optionally by actively controlling the operating angle of the actuator. That is why the system is called the active front steering(AFS).
The relation among the front wheel angle,the actuator operating angle and the steering wheel angle is shown as follows[3]

δFFis calculated as follows

where kvis the proportional gain,and ksthe derivative gain.kvand ksare related to the speed of vehicle.SubstitutingδFFof Eq.(5)into Eq.(4),its Laplace transform can be obtained.

where s is the Laplace operator.By setting up the relationships of kvand kswith the speed to realize the rules of basic variable gear ratio,the vehicle response characteristics can be actively controlled. In reference to BMW and Refs.[3,9]about the range of the steering variable ratio and the relation between the variable ratio and the speed of vehicle,the kinematical function of the steering ratio is designed in this paper,as shown in Fig.3.

Fig.3 Steering variable ratio rule
In active front steering as shown in Fig.1,using control methods above,actual input of me-chanical steering gear isδp=δsw+δFF+δFB.Compared with Eq.(2),the value ofθpcan be determined,which equals to-(δFF+δFB)n1/n5.Then,the expected variable gear ratio and steering characteristic can be realized by controlling the angle of active steering motor.θaccan be expressed as

2 Driver-Vehicle-Road Closed-Loop Model
2.1 Driver model
Driver,vehicle and road are various aspects in the manipulation of vehicle.During driving,the driver has to constantly modify the vehicle direction according to the vehicle state and road conditions.The three aspects constitute a drivervehicle-road closed-loop system.The"preview optimal curvature model"[10-12]proposed by Guo determines steering wheel angle based on single preview hypothesis and optimal curvature control. This model can simultaneously take the dynamic response characteristics of the vehicle and hysteresis of driver's response into account.It is called the single point preview driver model[10],as shown in Fig.4.

Fig.4 Single point preview driver model
In Fig.4,T is the preview time,c(s)=c0(1+ Tcs),c0=u2x/Gay,and Gayis the steady-state gain of lateral acceleration.For a skilled driver,T can be set to 0.8 s,Tc0.406 8 s,td0.3 s,and th0.1s[9-11].In actual application of the proposed model,the lateral speed and lateral displacement are given by the actual vehicle or the simulation model of the vehicle.In this paper,the drivers'input of the simulating vehicle is given by the single-point preview driver model.
2.2 Linear 2-DOF vehicle model
The 2-DOF linear vehicle model is commonly used in the study of steering movement(Fig.5). The dynamic equation is described as[13]

Substitutingδf=(δsw+δFF+δFB)/G into Eq.(8),the following equations can be derived.

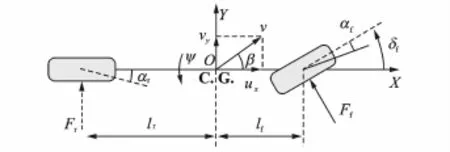
Fig.5 2-DOF vehicle model

where K is the understeering coefficient of vehicle andμthe adhesion coefficient of road.
2.4 Active disturbances rejection feedback controller
In this section,the design of ADRC[7]will be discussed in detail.ADRC is the feedback controller,and active angleδFBoperated by target yaw rate follow-up control.The actual vehicle model is much more complicated than the linear 2-DOF vehicle model with a lot of nonlinear problems. Obviously,compared with the actual vehicle mod-
2.3 Reference model
The expected yaw rateψdis determined by the desired linear 2-DOF model.Considering the road adhesion conditions of vehicle driving,the expected yaw rate responseψdon steering wheel under the angle input is expressed asel,the linear model of 2-DOF is over-simplified. Therefore,the proposed model contains a lot of unmodeled dynamics and its accuracy is poor. Control method depended on the precision of model is bad at the result control.The nonlinear coupling problem related to 2-DOF model requires a large amount of calculations to be decoupled.ADRC can adopt nonlinear feedback to implement dynamic compensation only based on the input and output of the system.Therefore,the first advantage of the ADRC model is that the control system can be treated by using a unified way,no matter the system is linear or nonlinear,certain or uncertain.The second advantage of the model is that in the rejection of disturbance,a specific and observable model for external disturbance is not necessary.Other advantages include:(1)The control algorithm does not need to identify the control object.(2)The control algorithm has good portability.(3)For the coupled problem of dynamic equation,only the static coupling need to be considered instead of the dynamic coupling.

In Eq.(5),.δswcan be obtained from.δswby a differential process,which can be obtained from δswby a differential process.The method for obtaining.δswis


Similarly,the differential process mentioned above is adoped in the desired referenceψd,expressed in Eq.(13).This is called the transition process in ADRC technique.The first function is to increase the adjustable range of parameters; the second function is to provide error signal for ADRC.

In Eq.(9a),f11(ψ,β)is the sum of disturbance,which includes unmodeled error,parameter error and internal-external disturbance.Extended state observer(ESO)listed in Eq.(14)estimates the system states and the sum of disturbance.

where z1,z2,and z3estimate states x1,x2,and x3,respectively and x3equals to f11(ψ,β).In Eq.(14),function Fal(·)is expressed as

whereξandΔare the positive numbers,and sign(·)is the signum function.
The state errors of system e1and e2are defined as v1·(-z1)and v2·(-z2),respectively,and they are used in the design of ADRC.In this paper,the feedback control law of error u0is expressed as

In the ADRC algorithm,δFBis dynamically calculated by ESO using u0and z3,expressed in Eq.(17).

where f12is a known disturbance.Substituting δFBof Eq.(17)into Eq.(14),the two-order ESO can be expressed as

Eq.(18)shows that ESO becomes a pure integrator tandem observer.δswis given by the driver model.ψdis obtained by the reference model and ESO is designed based on the linear 2-DOF model.Thanks to the fact that the nonlinear characteristics of model treated as disturbances are all included in f11,ESO can guarantee enough preci-sion.
So far,the ADRC and the PD controller have been discussed in this section and Section 1.2,respectively.According to the above discussion,the control model of AFS is shown in Fig.6.Here,the ADRC controller is illustrated inside the dashed box in Fig.6.

Fig.6 Control model of active front steering
It can be seen from Eq.(8)that yaw rateψ and sideslip angleβare coupled.Using the ADRC controller,as long as y*is measurable,f11(ψ,β)can be estimated by z3and the decoupling control ofψandβis realized by ADRC without complex decoupling of matrix computation.Therefore,the algorithm of ADRC can ensure good real-time performance.
3 Simulation Analysis
In order to validate control effects of steering variable gear ratio and tracking performance of path of the proposed ADRC,a driver-vehicle-road closed-loop control model is established in Matlab/Simulink,which controls vehicle model of CarSim software(CS B-CLASS)to complete the tests of DLC and PCS.These two tests were carried out at speeds of 100 km/h and 120 km/h,respectively.The test path and placing of cones are adaptively set in accordance with the standard test[13,14]and the changes of speed(Technical Report of State Key Laboratory of Automobile Dynamic Simulation,Jilin University).Placing of cones for marking the pylon course slalom track is shown in Fig.7,and that for marking the double lane-change track is shown in Fig.8.

Fig.7 Placing of cones for marking pylon course slalom track

Fig.8 Placing of cones for marking double lanechange track
In Figs.7,8,the center line of the trajectory surrounded by cones is a broken one,which is impossible for the vehicle to follow such a trajectory.Therefore,the non-smooth trajectory must be preview correction[11]in the simulation tests.The lines AB and GH in PCS test and the lines AB and CD in DLC test are replaced by cubic spline curves that satisfy the boundary conditions(The whole curve is smooth and continuous).The line B-G targeted trajectory in PCS test is a cosine curve,with the amplitude of d,as shown in Fig.7.The parameters of simulation vehicle are listed in Table 1.
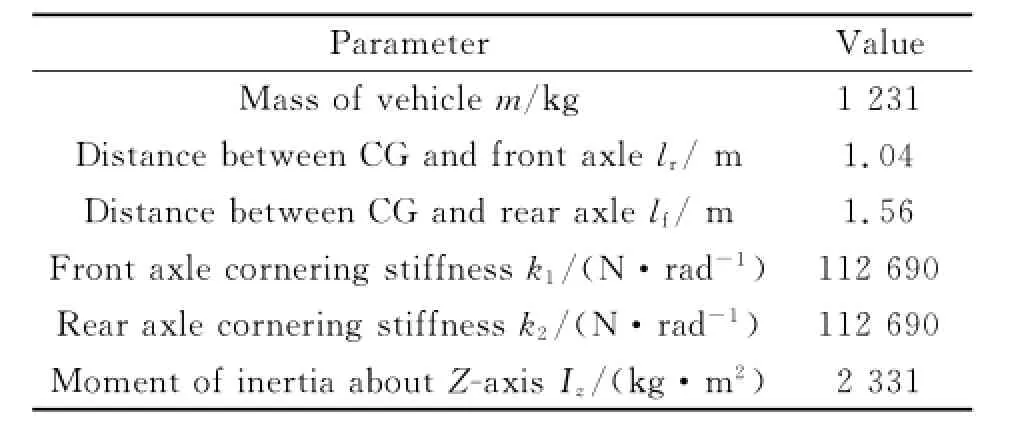
Table 1 Basic parameters of the vehicle
The steering system of the existing vehicle has a feature of understeering to some degree. The actual vehicle model with a significant nonlinear characteristic is controlled by the steering wheel angle derived from the simple driver model,which can track the ideal path at the beginning of the test.However,a large error appears at the later stage of the test,which is illustrated in thesimulating results in Figs.9,10.In the test,road adhesion coefficient is 0.85.Since the vehicle exists understeering,if a vehicle bears no AFS,it is necessary for the driver to turn larger steering wheel angle to complete the test,as shown in Fig.11.In such a test,the driver needs to constantly amend the steering angle,thus increasing driving difficulty.The results in Figs.9,10 indicate that the vehicle with AFS can perform the high-speed DLC and PCS tests well,and the path tracking performance is significantly better than that with the fixed gear ratio system.Moreover,it is not necessary for the driver to change his driving habit. The active front steering system can automatically compensate understeering and correct oversteering.Therefore,the driving difficulty is reduced,the handling and stability of vehicle are enhanced,and the driving safety is greatly improved.

Fig.9 High speed double lane change test
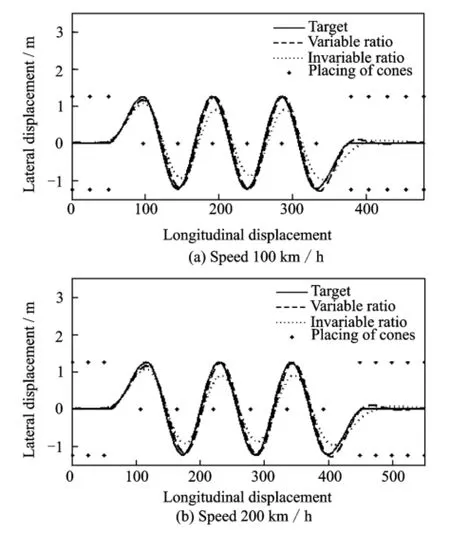
Fig.10 High speed pylon course slalom test
For checking the performance of the ADRC model,the test of angle step input of steering wheel was conducted.The test results are shown in Fig.12,where the solid line is the yaw rate step response curve without AFS,and the dashed line the yaw rate step response curve with AFS. The results in Fig.12 show that the overshoot and the response time of yaw rate of the vehicle with AFS are obviously smaller than that without AFS.Hence,the response performance of vehicle with AFSis improved,which alsoindicates that AFS can improve the handling and stability of vehicle.
It is interesting that the same control parameters of ADRC are used to implement the DLC test,the PCS test and the step response test.The controlling effects of all tests are satisfying,which indicates that the ADRC controller has good robustness.
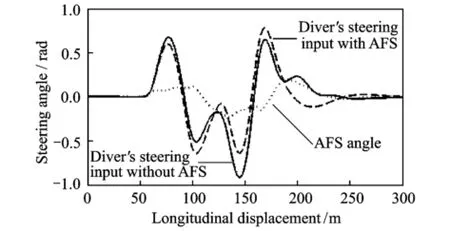
Fig.11 Driver's input
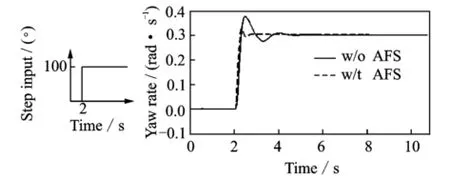
Fig.12 Yaw rate step response
4 Conclusions
An AFS model of feed-forward control and feedback control is proposed.Feed-forward controller using the known PD algorithm has realized the changeable response characteristic of the vehicle.The feedback controller using active disturbance rejection technology has enhanced the controllability and stability of vehicle when steering. In the active disturbance rejection control,since the nonlinear characteristic of vehicle regarded as a disturbance can be estimated in real time and be dynamically compensated by ESO,the precise nonlinear dynamic equation is not necessary.The simulation results show that ADRC using 2-DOF model has good control effects.Here the nonlinear control problem and the decoupling problem of parameters are solved.Vehicle with AFS performs well in path tracking,characteristic of lateral response,and robustness.
Since the unmodeled dynamics,known or unknown disturbance and non-linear characteristic can be treated by using a unified way,the control method of ADRC is simple.Simultaneously,the design of ADRC controller does not need precise model and has no specific object,thus the controller has good the portability and adaptability.
The AFS without considering the influence of longitudinal force is investigated.In the ADRC controller designed for AFS the influence of longitudinal force,and the influences of suspension and other control system should be addressed in the further research,as well as the integrated control of AFS with other systems.
Acknowledgement
This work was supported by the National Natural Science Foundation of China(No.51205191).
[1] Reinelt W,Klier W,Reimann G,et al.Active front steering(part 2):Safety and functionality[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2004-01-1101.
[2] Wang Chunyan,Zhao Wanzhong,et al.Parameter optimization of electric power steering integrated with active front steering function[J].Transaction of Nanjing University of Aeronautics and Astronautics, 2012,29(1):96-102.
[3] Kojo T,Suzumura M,Tsuchiya Y,et al.Development of active front steering control system[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2005-01-0404.
[4] Shang Gaogao,Hong Ze,Zhang hongdang,et al. Modeling of variable steering ratio with steady-state gain for active steering system[J].Journal of Jiangsu University:Natural Science Edition,2010,31(3):278-282.(in Chinese)
[5] Liao Linqing,Wang Wei,Qu Xiang.Variable steer ratio of dynamic steering system based on yaw velocity gain[J].Journal of Chongqing University of Technology:Natural Science Edition,2011,25(4):1-5.(in Chinese)
[6] Wei Jianwei,Wei Minxiang,Zhao Wanzhong.Control law of varied steering ratio based on driver-vehicleroad closed-loop system[J].Journal of Jiangsu University:Natural Science Edition,2011,32(6):652-657.(in Chinese)
[7] Han Jingqing.Active disturbance rejection control technique the technique for estimating and compensating the uncertainties[M].Beijing:National Defense Industry Press,2008.(in Chinese)
[8] Willy Klier,Wolfgang Reinelt.Active front steering(Part 1):Mathematical modeling and parameter estimation[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2004-01-1102.
[9] Jeonghoon Song.Design and evaluation of active front wheel steering system model and controller[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2014-01-2000.
[10]Guo K H.Drivers-vehiele closed-loop simulation of handling by“preselect optimal curvature method”[J]. Automotive Engineering,1984,3:1-16.(in Chinese)
[11]Guo K H,Guan H.Modeling of driver/vehicle direction control system[J].Vehicle System Dynamics,1993,22(3-4):141-184.
[12]Guo K H.The principle of vehicle handling dynamics[M].Nanjing:Science and Technology of Jiangsu Press,2011.(in Chinese)
[13]National Bureau of Technical Supervision.GB/ T6323.1-94,Controllability and stability test procedure for automobiles Pylon course slalom test[S]. Beijing,1994.(in Chinese)
[14]International Standardization Organization.ISO/FDIS 3888-1,Passenger cars Test track for a severe lane change manoeuvre part 1:Double lane change[S]. Beijing,1999.
(Executive editor:Zhang Tong)
U461.4 Document code:A Article ID:1005-1120(2015)04-0461-08
*Corresponding author:Sang Nan,Associate Professor,E-mail:sangn@czu.cn.
How to cite this article:Sang Nan,Wei Minxiang,Bai Yu.Control of vehicle active front steering based on active disturbance rejection feedback controller[J].Trans.Nanjing U.Aero.Astro.,2015,32(4):461-468.
http://dx.doi.org/10.16356/j.1005-1120.2015.04.461
(Received 21 November 2014;revised 26 January 2015;accepted 28 February 2015)
猜你喜欢
杂志排行

Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- Experiments on an Open-Loop Cycle Carbon Dioxide Refrigeration System
- Real-Time Rendering of Dynamic Clouds Using Multi-Resolution Adaptive Grids
- A Hydrodynamic Model for Dimpled Mechanical Gas Seal Considering Interaction Effect
- Resolution Increase and Noise Removal in Particle Size Distribution Measurement with Shifrin Transform
- Perturbation to Noether Symmetries and Adiabatic Invariants for Generalized Birkhoff Systems Based on El-Nabulsi Dynamical Model
- Dynamic Surface Control with Nonlinear Disturbance Observer for Uncertain Flight Dynamic System