基于小型无人机的近岸海域成果定位精度探讨
2015-11-22张金华王同行符史勇
张金华,王同行,谢 恬,符史勇
(1.海南省海洋监测预报中心,海口 海南570206,2.海口市海洋环境监测中心,海口 海南 570105)
1 引言
此次作业采用的名为大白的ZW3 机型无人机,采用GPS+GLONASS 卫星导航系统[1],集成的机载传感器获取航向,速度,姿态等数据[2],机载GPS 接收机飞行定位精度为±5 m,照片重叠率为纵向(飞行航向)为80%,横向70%,飞行高度600 m,影像分辨率0.2 m,飞行后的数据以Pix4D Mapper 为图像处理平台,图像处理后的控制点坐标获取、点位精度分析在ArcGIS 9.3 软件平台上完成[3]。
海域无人机飞行区域一般为沿岸线的长方形区域。海南省多沙滩和防风林,具有特征地物少,控制点难以选取的特点。本次飞行区域选取海南省东方市鱼鳞洲沿海区域为飞行作业区。该区域南北长12 km,东西宽3 km。该区域作为实验区域的优点有:①有两条大体平行、相距1 开幕左右的公路贯穿整个实验区域;②公路上及周边遮挡较少,且行人不多,适合设置控制点,同时控制点可以分布均匀,分布图如图1 所示。其中,整个飞行作业区分为控制区、检验区两部分。控制区为1-10 控制点覆盖相关区域,南北长4 km,东西3 km;检验区为11-17 控制点覆盖相关区域,南北长8 km,东西宽3 km。在分析中,以控制区控制点的数量变化来分析无人机影像成果精度的变化。具体为无控制点参与解算成果,日常作业控制点数量、分布参与解算成果,1-10 号控制点参与解算的控制点能够均匀布设整个控制区的解算成果。为了使1-10 号控制点分布比较均匀,控制点设置采用喷漆的方式,红色圆点,直径60 cm。

图1 区域分布图
2 数据获取及处理流程
数据获取及处理流程如图2 所示。

图2 流程图
3 绝对定位精度误差对比分析
本次实验共完成了3 组数据,并进行对比分析。采用坐标系为CGCS2000 坐标系,采用南方S86-T接收机,应用海南iCORS 平台系统,控制点平面精度为±0.05 m,在检定有效期内。以实际采集的控制点做为真值,根据生成的TIF 数据,捕捉这些控制点,获得控制点坐标做为成果值与真值对比,分析在不同情况下的定位精度,具体情况如下。
无控制点参加解算,根据无人机的姿态定位数据进行处理,处理后的结果如表1,图3 所示。


表1 1 组解算数据(单位:m)

图3 1 组解算数据分布图
1 号至5 号共5 个控制点参加解算(日常飞行一般沿海岸线方向,查找明显地物作为控制点,点间距1 km,控制点基本为于沿海一线),结果如表2,图4 所示。

除去7 号的1 号—10 号分布均匀的9 个控制点参加解算(在添加控制点时发现7 号控制点因遮挡,无法辨别,因此其未参加解算),结果如表3,图5 所示。

表2 2 组解算数据(单位:m)

表3 3 组解算数据(单位:m)
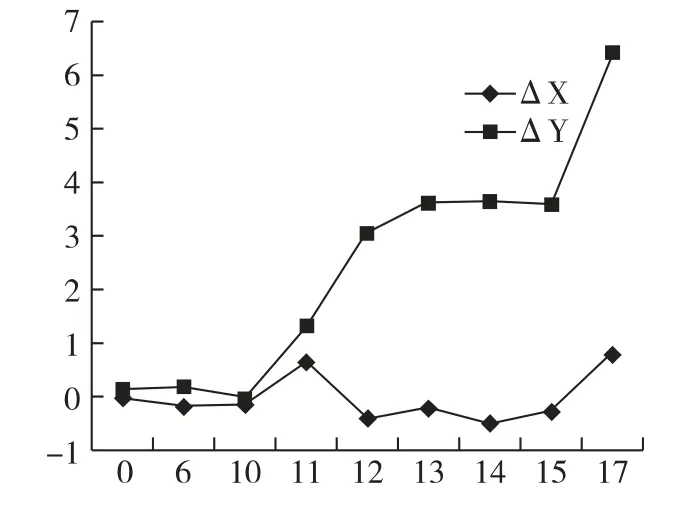
图4 2 组解算数据分布图

图5 3 组解算数据分布图

4 误差对比分析
(1)3 组数据存在很大的共性,即在Y 方向(航向方向)上的误差在控制区能够与X 方向(垂直于航向方向)基本相同,但是在检验区,该误差会迅速激增,明显高过X 方向误差多倍。
(2)增加控制点并使其均匀分布于飞行作业区能够有效地提高定位精度,控制区定位精度在±0.3 m 范围内。
(3)无控制点参加解算整幅图像定位精度基本一致,而有控制点参加解算的图像数据精度在控制点覆盖区域向外,误差迅速增加,在1 km 处误差已经达到1.5 m,而且随着距离的增加,误差不断增大。
(4)根据中误差公式计算可得,控制点的增加及分布的合理化,可以有效地提高定位精度。其中,在控制区域,中误差减小到了0.124 m,为达到海籍调查规范中界址点所需精度提供可能。
4 相对精度误差分析
4.1 数据对比如下,如表4,图6 所示。

表4 数据对比表

图6 数据对比图
4.2 结果分析
(1)两组数据对比发现:在控制区,有均匀分布控制点参加解算,相对误差最高为0.2 m,而无控制点数据误差最高为1.7 m。但是同时发现,无控制点数据相对误差整幅图像比较稳定,最高未超过3 m,而增加了控制点的数据最高确达到了6 m。这说明增加控制点后虽然有效的提高了控制区的定位精度,但对无控制点的区域则会引入误差。
(2)根据上表误差数据均为正值得出:无论有无控制点,整幅图像均被拉伸。
5 结语
通过讨论得知了海南省海域动态监管无人机成果的定位精度,从中也得到了误差变化的规律,为今后提高无人机作业成果定位精度提供了理论指导。以1 km 为间距的控制点分布区域内能达到海域使用面积测量规范得要求,如果要达到海籍调查规范中界址点精度优于0.1 m 的要求[4]。因此,要进一步加密控制点、优化网形。同时在研究中发现根据本次实验的数据在一些方面无法讨论,如因控制点较少,不能全面地分析误差与控制点数量、分布的关系等。今后将持续关注该领域的论文成果,同时也会在今后的工作中,选取合适的地点、地形开展研究。
[1]谭雁英,周旗,张波,等.小型无人机航位推算定位算法研究与误差分析[J].火力与指挥控制,2007,32(5):8-15.
[2]宋英麟,鲜斌,茹滨超,等.无人机微型姿态航向系统数据处理[J].中南大学学报(自然科学版),2013,44(9):89-93.
[3]党安荣,贾海峰,易善桢,等.ArcGIS 8 Desktop 地理信息系统应用指南[M].北京:清华大学出版社,2005.
[4]李玉清.基于Pixelgrid 的无人机数据处理[J].现代测绘,2013,36(2):36-38.
[5]中华人民共和国国家海洋局.HY/T 124-2009 海籍调查规范[S],北京:中国标准出版社,2009.
[1]富立,刘文丽.无人机捷联航姿系统磁航向误差分析[J].中国惯性技术学报,2007,15(6):650-652.
[2]张秋阳.无人机姿态测算及其误差补偿研究机械电子工程[D].长沙:中南大学,2011.
