煤炭开采地表移动变形自动化监测系统的应用研究
2015-11-22范红梅杭玉付司鹏伟王明明
范红梅,杭玉付,辛 浩,司鹏伟,王明明
(1.淮南矿业集团潘一矿,安徽 淮南 230000;2.南京工业大学测绘科学与技术学院,江苏 南京 211800;3.南京科博空间信息科技有限公司,江苏 南京210019)
1 引言
煤炭是我国的基础能源,我国是煤炭生产与消费大国,煤炭在我国经济发展的过程中发挥了重要作用。据了解,“十二五”末我国煤炭总需求量每年将会突破40 亿吨[1]。煤矿开采产生的地表移动对人们的正常生活造成严重影响,从而对安全生产、生态环境等造成严重的破坏和危害。因此,开展开采地表移动沉陷观测显得尤为重要。传统的测量方法是采用全站仪、水准仪等技术,对监测体进行定期或不定期的观测,不仅要耗费大量的人力、财力,劳动强度大,需要技术人员进入监测区域,存在一定隐患,且观测成果的处理周期较长[2]。同时,传统观测对观测时的天气要求也苛刻,这就造成了对点监测对象难以实现自动、实时与连续监测[3]。
煤炭开采地表移动自动化监测系统集成了网络RTK、GNSS CORS、GIS、网络传输、测量数据处理分析等技术。充分体现了科技创新的趋势。该系统能够适应任何恶劣环境,在观测站之间不需要通视,测点位置选泽适应性强,从观测、记录、计算、预警全部实现自动化。系统为矿区开采沉陷提供一种高效的数据采集、处理和变形分析的自动化手段,为恢复与重建矿区生态环境、矿山开采沉陷工程治理、村庄搬迁规划、地质灾害治理等提供了科学依据,为矿山安全开采及矿山地质环境治理提供了技术支撑。
本文以安徽省淮南矿业集团潘一矿东区1262(3)工作面重复开采为实例,具体介绍并分析煤炭开采地表移动自动化监测系统在监测地表移动的可靠性。
2 自动化监测系统的实施
2.1 工作原理
监测子系统将实时采集的北斗/GPS 观测数据及其他监测数据通过WiFi 无线网络或3G、光纤相结合传输至数据中心子系统。数据中心子系统对北斗/GPS 观测数据进行预处理,先由变形监测软件实时处理监测点和基准站观测数据解算出各监测点与基准站之间的相对空间位移变形量,再由煤炭开采地表移动自动化监测系统对变形位移信息分析,根据地表位移信息之间响应关系的经验值进行决策预警。警报子系统根据预报分析软件可以自动通过无线网络、手机、广播等手段向煤矿企业、当地政府等发布危险警报信息,如图1 所示。
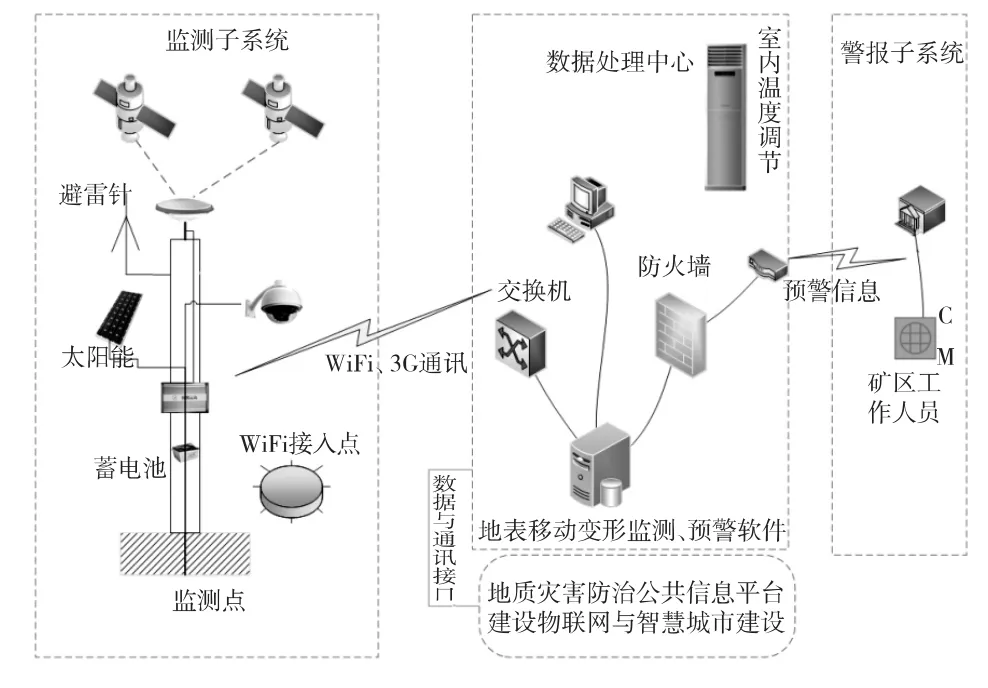
图1 系统工作原理
2.2 系统组成
地表移动自动化监测系统由综合管理子系统、数据采集子系统、数据传输子系统、数据处理中心子系统和移动变形分析预报子系统5 个子系统组成。其中数据处理子系统是多源数据融合与地表移动参数解算中心,移动变形分析预报子系统是监测数据分析预警中心,这2 个子系统是地表移动自动化监测系统的核心。地表移动自动化监测系统各子系统的功能和设备组成如表1 所示。
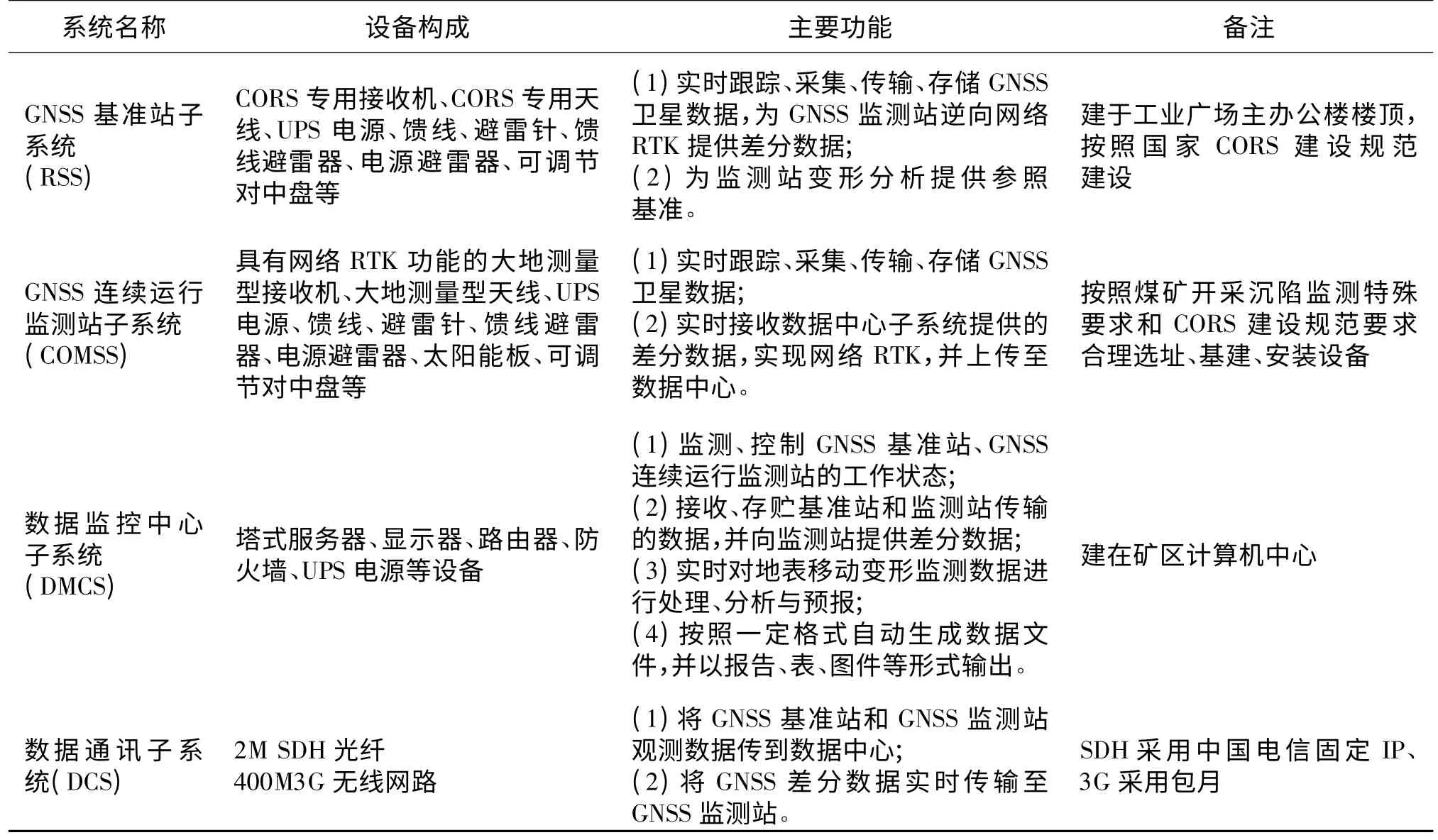
表1 地表移动自动化监测系统各子系统设备构成与主要功能
2.3 GNSS 基准站子系统
2.3.1 选择站址
(1)观测环境
距易产生多路径效应的地物(如高大建筑物、树木、水体、海滩和易积水地带、电磁干扰区等)的距离不小于200m;应有10°以上地平高度角的卫星通视条件;避开易产生振动的地带。
(2)维持条件
便于接入公共或专用通信网络;具有稳定、安全可靠的电源;交通便利,便于人员往来和车辆运输;便于长期保存。
2.3.2 基准站建设
基准站为不锈钢钢架结构,其结构如下图2所示。
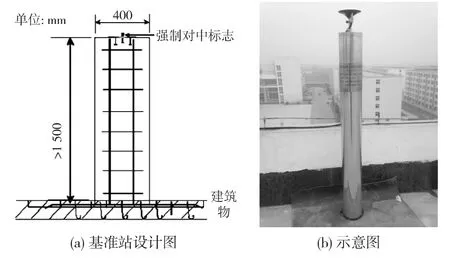
图2 基准站钢架结构图
2.4 监测站选址
根据该项目研究目标与内容,以潘一矿东区为例,按照设计原则和设计依据,建设一个新的自动化监测站、与原有的自动化监测站组成一个系统,共同对矿区的地表进行监测。新系统的监测范围更广阔。结合交通位置与自然地理条件,选择在开采沉陷区重要位置布设3 个GNSS 连续运行监测站,点的编号分别为CORS 10、CORS 11 和CORS 12,这3 个自动化监测站接收潘一矿东区基准站的差分数据,实时将测量数据上传至服务器软件。其中CORS 10 布设在1262(3)工作面倾斜主断面采空区下边界拐点附近,主要用于监测1262(3)工作面下山边界附近地表移动变形信息;CORS 11 布设在1262(3)工作面倾斜主断面采空区的最大下沉区域,主要用于监测最大下沉区域附近地表移动变形信息及动态特征(如超前影响距、超前影响角、最大下沉值等);CORS12 布设在1262(3)工作面倾斜主断面采空区上边界拐点附近,主要用于监测上山边界附近地表移动变形信息。
3 变形分析
移动端软件可以在室内实现数据接收、处理、变形分析以及绘图等功能。滤波理论是一种高效、实用的数据处理方法。卡尔曼滤波器是一个最优化自回归数据处理算法,已在计算机图像处理、航空器轨道修正、导航与动态定位等领域应用了30 余年[4]。利用卡尔曼滤波理论处理采集的地表变形信息能够得到更准确的变形结果。同时由于该项目覆盖区域比较小,可直接用GPS 大地高高差来代替正常高高差,并通过它直接反映该地表区域的变形情况,如图3 所示。

图3 各站点变形量统计图
终端服务器软件自带数据变形分析功能。图3可见位于采区内的CORS 11 号站布设在1262(3)工作面的最大下沉区域内,在相同时间内,下沉量最大,符合1262(3)重复开采沉陷的实际情况。
图4 显示CORS 10 号站在2015年1月—3月期间下沉量有800 mm 左右,下沉速率约为8.89 mm/d,其中2月19日前后是春节放假,煤矿停止开采,所以在这时间段的地表比较稳定;到了3月份之后,下沉速率明显降低,只有1.33 mm/d。

表2 自动化监测站数据分析表
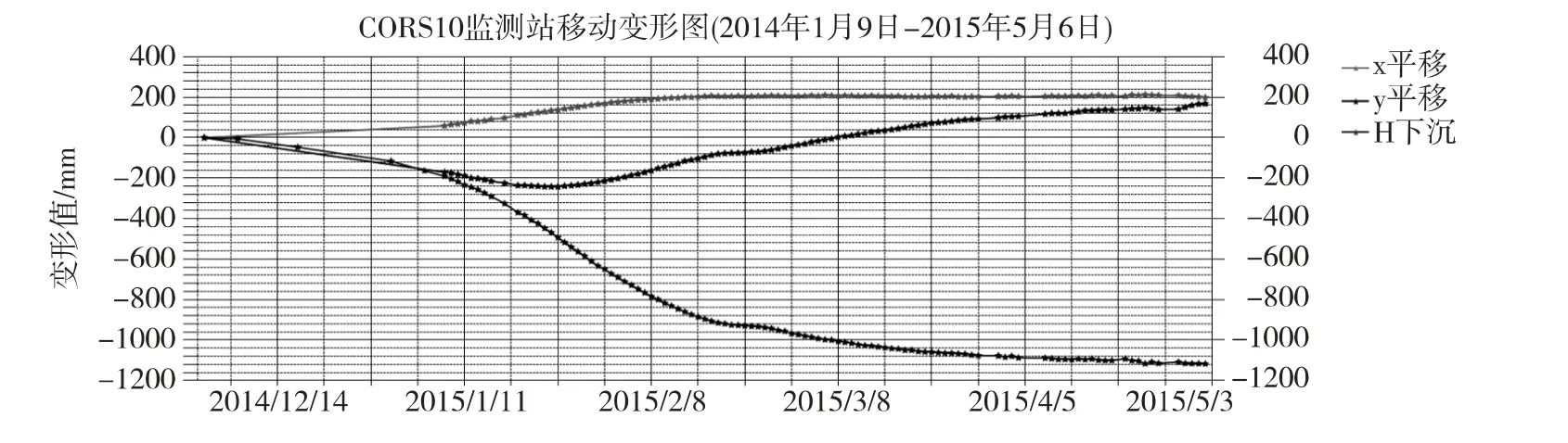
图4 CORS10 监测站移动变形图
在2015年1月中旬—2月期间,受采区影响,在x 方向出现移动,随后移动速率比较稳定。从建站开始至1月25日,向y 轴负方向移动,随后向正方向移动。

图5 CORS11 监测站移动变形图
图5 中CORS 11 号站在2015年1月—3月中旬期间下沉量有1140 mm 左右,下沉速率约为10.86 mm/d。同理,2月19日前后是春节放假,煤矿停止开采,所以在这时间段的地表比较稳定;到了3月下旬之后,下沉速率明显降低,只有2.22 mm/d。
在2015年1月中旬—3月中旬期间,受采区影响,在x 方向出现移动,随后移动速率比较稳定。从建站开始至1月底,向y 轴负方向移动,随后向正方向移动。
图6 中,CORS 12 号站在2015年1月—3月中旬期间下沉量有580 mm 左右,下沉速率约为5.52 mm/d,到了3月下旬之后,下沉速率明显降低,只有2.67 mm/d。
在2015年1月中旬至3月中底期间,受采区影响,在x 负方向出现移动,随后移动速率比较稳定。从建站开始至1月底,向y 轴负方向移动,随后向正方向移动。
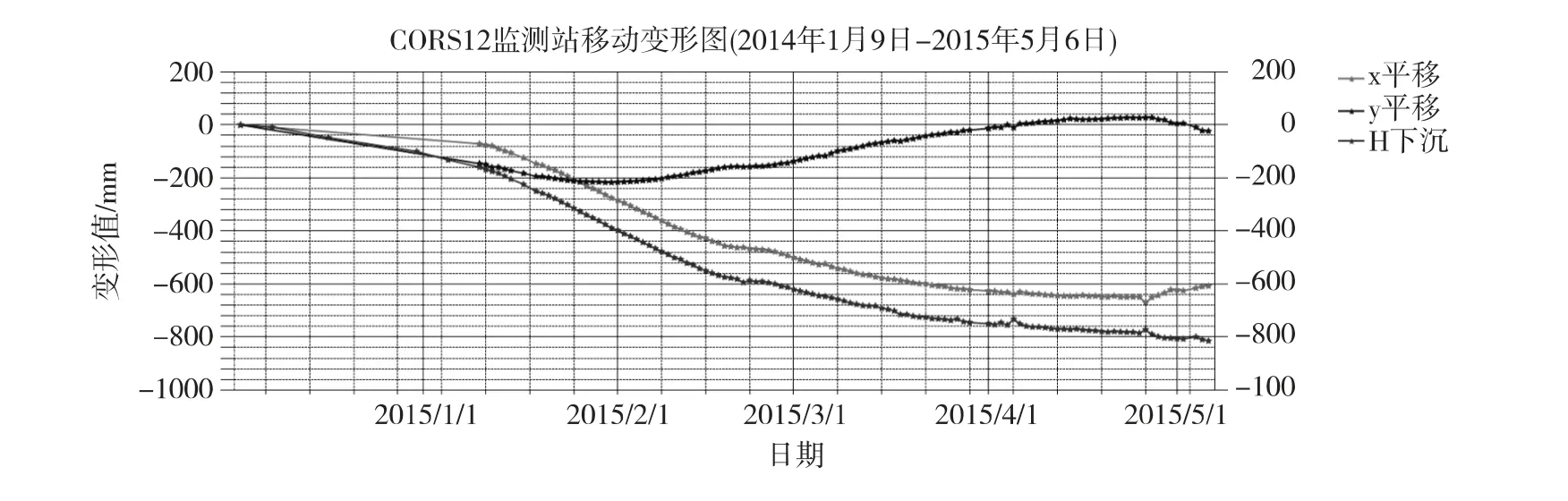
图6 CORS12 监测站移动变形图
4 总结
煤炭开采地表移动变形自动化监测系统是一种高度自动化的监测系统,能够实现一体化外业数据采集,自动化数据传输、管理、分析的功能,可以非常清晰地反映地表移动情况,能够实现无人值守,自动观测,自动预警功能。告别了传统监测模式,大大降低了监测成本。煤炭开采地表移动自动化监测系统还可以与各类传感器联合使用,系统经过简单改造后可以应用于工程测量、管线探测、房产测绘、地形测绘、林业调查等领域[5],[6],体现了煤炭开采地表移动变形自动化监测系统应用的广泛性。
今后需要在各种实践应用中不断改进,不断集成更先进、可靠的技术,最大限度地发挥自动化监测优势。
[1]刘一霖.矿区开采沉陷大量级形变监测与反演分析[D].西安:长安大学,2013.
[2]丁安民,田八林,李克昭,等.矿区沉陷灾害监测方法综述[J].河南理工大学学报(自然科学版),2013(2):165-169.
[3]魏庆伟.矿山开采沉陷变形监测行业规范探讨[D].安徽理工大学,2014.
[4]彭丁聪.卡尔曼滤波的基本原理及应用[J].软件导刊,2009(11):32-34.
[5]蒋法文,刘可胜,杭玉付,等.煤矿开采沉陷自动化监测实时数据采集终端系统研究[J].矿山测量,2014(5):93-97.
[6]杨旭,汪洋,汪泽,等.煤矿开采地表移动变形自动化采集终端系统设计与实现[J].测绘与空间地理信息,2015(6):94-97.
