服务机器人导航技术研究进展
2015-11-18李汉舟
杨 娜,李汉舟
(航天科技集团第九研究院 第十六研究所,陕西 西安 710100)
0 引言
在过去的半个多世纪里,机器人技术取得了飞速的发展,在工业生产中发挥着越来越重要的作用,被广泛用于完成重复性高、危险性大和精度要求高的工作。然而人们对机器人的要求并不仅限于此,伴随着对未来高度机械化和智能化生活的憧憬,人们希望机器人可以更好地服务于人类甚至代替人类完成多种多样的工作,这促使更多的学者投入到机器人的研究中。近年来,计算机、机器学习、传感器与人工智能等技术的迅猛发展使人们的愿景不断向现实靠近,机器人技术逐渐渗入服务行业,可以说机器人已经开始走进人们的日常生活。
为了推动机器人技术在各领域的广泛应用,美国于2009年5 月发布了《机器人技术路线图:从互联网到机器人》[1],并于2013年3 月再次更新。该路线图指出,服务机器人的技术研究是未来机器人行业的发展方向之一。根据国际机器人联合会(IFR)的定义,服务机器人是一种半自主或全自主工作的机器人,它能完成有益于人类健康的服务工作,但不包括从事生产的设备[2]。近年来,针对服务机器人的研究越来越多,王田苗等[3]对国内外服务机器人的研究成果做了详细综述,可以看出服务机器人的研究已经受到世界各国的广泛关注。电器成本的下降也为服务机器人的研究以及应用提供了有利条件。
与传统的工业机器人不同,服务机器人的工作环境通常是非结构化的,并且需要协助或与人类共同执行特定任务[4],这就要求服务机器人具备可移动、易操作、智能化水平高、适应性强等特点。要达到这样的要求,服务机器人研究和开发所需要涉及的技术非常复杂,其中导航技术是一项核心关键技术[5],也是实现其智能化和自主化的关键。可以说服务机器人的发展在很大程度上是由导航技术的发展推动的。因此,了解服务机器人导航技术相关的最新发展动态对未来服务机器人的研究与开发有很大帮助。
笔者对服务机器人导航技术近几年的发展现状以及未来发展趋势进行研究,为我国服务机器人的设计研发提供参考。
1 国内外服务机器人的发展动态
根据国际机器人联合会(IFR)对服务机器人的统计数据,2010年全球专业服务机器人和个人/家庭服务机器人销量额比往年分别增长15%和39%[6]。欧洲还于2012年开展了空中服务机器人项目[7],由此可见,服务机器人已经进入了一个快速发展的时代,服务机器人相关技术的研究将在更大程度上影响和改变人类的日常生活。
国外在服务机器人技术研究方面起步较早,在企业界和学术界均已取得很多成果。国外机器人企业在服务机器人方面的典型成果有:日本本田于2000年发布了首款ASIMO 机器人,该机器人主要使用视觉导航及超声波导航技术,通过视觉传感器与超声波传感器进行定位,并捕捉来向人群的行动路线进行局部路径规划,进而出色地完成智能导游的任务(如图1(a)所示);Intuitive Surgical 公司于1999年首次发布da Vinci 外科手术机器人(如图1(b)所示),该机器人通过视觉导航完成三维定位,协助医生完成手术;波士顿动力公司于2005年推出首款BigDog 四足大狗机器人(如图1(c)所示),该机器人能够通过立体视觉完成路面识别以及自身定位,通过激光传感器感应引路人的位置,惯性系统达到姿态稳定,同时利用构建消耗地图实现机器人的路径规划并完成军事任务;而iRobot公司的Roomba 系列吸尘器机器人(如图1(d)所示)通过红外传感器进行定位以及路径规划,完成清扫房间的任务。

图1 国外机器人企业的典型研究成果
国外学术界针对服务机器人的研究也从未停歇,Siddhartha S.Srinivasa 等[8]针对当时服务机器人不能满足人们需求的情况,在2010年开发并设计了一种室内服务机器人HERB,该机器人能够通过视觉导航,在杂乱的室内环境下完成精确的物体识别和定位,并通过机械手执行复杂的操作任务(例如拿起一个水壶而不让水洒出来)。Thomas Breuer 等[9]在前人的研究基础上,提出关于人机交互,场景语义理解以及同时定位和地图创建的新算法,并将其应用于移动服务机器人Johnny 上,为了适应机器人周围复杂环境,通过同时定位与创建地图方式实现机器人导航,希望它能够完成室内的服务任务。Stefan Schiffer 等[10]以让机器人能够与人类相处,并协助老年人进行日常活动为目的,研究了室内服务机器人CAESAR,该机器人能够识别人类简单的手势或语音命令,通过A* 算法进行初始的全局路径规划,在行驶的过程中使用激光传感器扫描障碍物并完成局部地图的创建,继而实现局部路径规划,最终完成机器人导航并完成相应的简单任务。
我国在服务机器人领域的研究起步较晚,但是也开始崭露头角,如中国科学技术大学机器人团队的“可佳”可以与人进行简单的交流且具备一定的逻辑推理能力,能够完成相应的自主导航任务;哈尔滨工业大学2010年开发研制的智能服务机器人可以为病人倒水喂药、与病人进行简单的交流、唱歌跳舞[11];上海交大开发了一个餐厅服务机器人,利用双目视觉系统进行精确定位,确保机器人能够准确抓取餐盘[12]。
从以上国内外服务机器人的研究现状可以看出,导航系统相关技术包括定位、避障、路径规划等,是服务机器人实现功能的保障,新型服务机器人的开发必须根据其功能选择适合的导航技术,并设计合理可行的导航系统。
2 服务机器人导航技术现状
以上所述服务机器人的发展现状表明,导航技术是服务机器人进一步智能化和得以广泛应用所需要突破的技术难点,因此下面对导航技术的相关动态进行全面的总结。目前,应用于服务机器人的导航技术多种多样,其中最常用的主要有磁导航、惯性导航、传感器导航、卫星导航、视觉导航。各类导航技术的基本原理以及优、缺点如表1 所示。
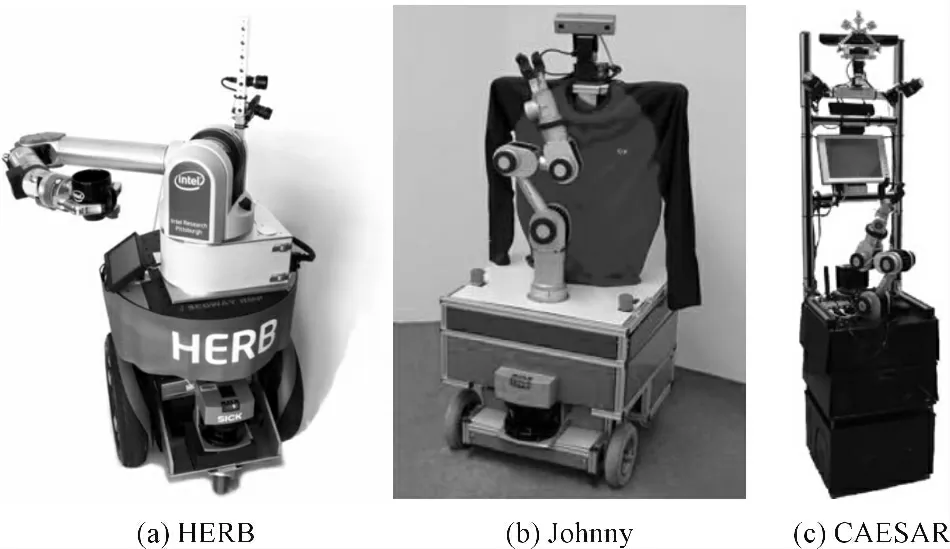
图2 国外学术界的服务机器人设计
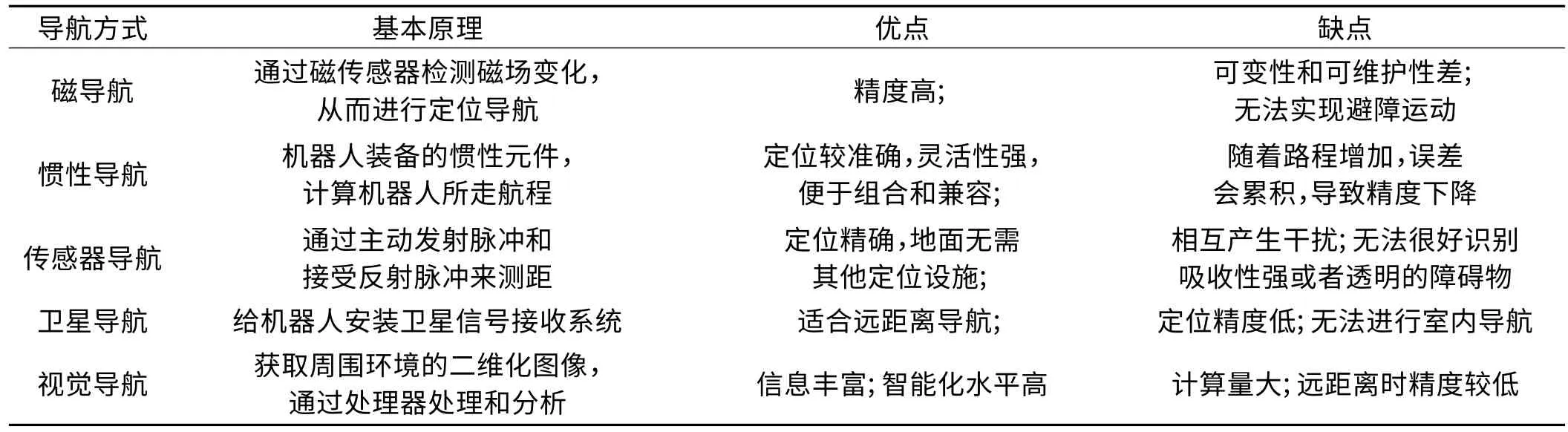
表1 导航技术分类及优、缺点比较
2.1 磁导航
自然界中,磁场无处不在,无论是天然的铁、镉等材料,或是人造电子设备等,都存在磁场的变化,如果可以精确地识别这些变化,那么磁场就如指纹一样成为各方位的独特象征[13]。因此,研究如何利用磁场进行服务机器人导航具有很大的应用价值。目前,服务机器人磁导航主要通过以下方式实现:在行驶路线下埋设能够产生磁场的结构(如可通电导线或磁铁),通过机器人上安装的磁传感器检测磁场,并引导机器人按照预定轨道行驶进行导航。该方法抗干扰能力强,不易受环境因素的影响,具有较高的精度和良好的重复性。但成本较高,可变性较差,且无法对出现在行驶路径中的障碍物做出避障反应。
目前,该技术多应用于工作环境简单,精度要求高,可靠性好的服务机器人中。韩金华等[14]在预行驶路径埋设磁钉形成导航线,通过安装在护理助手机器人上的8个磁阻传感器测量并修正机器人的行驶路线,完成了高精度的导航任务。另外,有学者希望根据观测每个方位磁场的显著变化进行服务机器人导航,并对此展开了深入研究。William Storms 等[15]制定了两种磁导航方案并完成了导航算法的研究,一种是基于实际数据的地图匹配方案,假设基于室内磁场的地图已经创建完成,将磁场测量装置测得的数据与地图数据进行匹配得到具体的方位值;一种是引导-跟随方案,指引车在室内穿梭,并不断地测量磁场值,同时将观测数据传送给之后跟随的车辆,跟随车辆根据接受到的数据尝试以同样的路径行驶。这种方法不需要人为改变服务机器人周围的环境,且导航精度较高。对于这样一种导航方案,前期的磁场地图创建是至关重要的,学者们对于这一关键步骤进行了进一步的探讨[16-17],力求得到更好的地图创建方法,进而提高导航精度。
2.2 惯性导航
惯性导航最初主要应用于航空宇航领域,该导航系统分为平台式惯导系统和捷联式惯导系统两类,平台式惯导系统存在一个物理平台,惯性元件安装在物理平台上测量平台相对于惯性空间的角速度与加速度;捷联式惯导系统采用数字式平台替代了传统的物理平台,将惯性器件直接固连在载体上。如今,随着传感器、微电子等成本的下降,惯性导航技术也被用于服务机器人之上,研究人员利用惯性元件(加速度计和陀螺仪)来测量机器人本身的加速度以及角速度,并结合给定的初始条件,经过积分和运算得到速度、位置、姿态等参数,进而达到机器人自主导航的目的。该导航技术隐蔽性好,不易受外界干扰。但导航定位精度会随着机器人所走航程的增加而下降,且误差会累积,通常需要进行误差修正。因此,惯性导航技术多用于短期导航或与其他导航方式相结合的组合式导航。汪剑鸣等[18]针对惯性导航创建全局导航地图困难等问题,提出一种新的惯性/视觉组合导航室内全局地图创建方法。王聪等[19]将惯性导航与立体视觉相结合,通过创建风管清扫机器人同时定位与地图创建方案,有效地估计出机器人的三维位姿信息。Todd Lupton等[20]用载体参考系替代了传统的地球参考系,消除了机器人惯性导航系统平台初始位姿的不确定性,提出了将惯性导航与视觉导航相结合的新算法,进而完成了动态环境下的机器人室外导航。
2.3 传感器数据导航
传感器数据导航通过非视觉传感器进行定位导航,常用的传感器数据导航技术有红外导航,超声导航和激光导航。
红外导航利用红外传感器进行距离测量,判断机器人在环境中的位置。其结构简单,反应速度快,但易受光线、颜色、形状等影响。最基本的红外导航方法是将红外线发射器与红外线接收器安装在机器人上,通过发射器发射红外线,反射后由接收器接收,得到机器人与物体之间的距离,判断机器人所处的位置。也有学者使用其它方法进行红外导航,Sooyong Lee[21]将数个带有独特ID 的红外发射器安装在天花板上,从而将机器人的工作区域划分为几个部分,机器人携带光晶体管,通过接收到的红外线数目以及ID 判断所处区域,并通过与航位推算法的结合完成机器人导航。J.Krejsa 等[22]通过测量机器人与工作区域安装的数个红外线发射器之间的角度来判断自己所处位置,从而实现导航。
超声导航是应用最为广泛的传感器导航技术,通过超声传感器实现距离测量进而完成导航,该方法成本低,结构简单,不受光线影响,但易受物体表面形状影响而降低导航精度且无法探测远距离物体。超声导航的基本原理是超声发射器发射超声波,在空气中传播遇到被测物体,反射之后由超声波接收器接收,根据发射与反射的时间差确定机器人与被测物体之间的距离,实现机器人导航。然而超声传感器存在很大的波束角,无法准确判断机器人的方向,这也影响了机器人的导航精度。因此,学者们针对如何提高超声导航精度进行了研究:Ahmet YAZICI 等[23]将3个超声发射器安装在机器人工作环境矩形框的顶点上,控制3个发射器发射的顺序,通过机器人自身携带的超声接收器接收超声波信号并得出机器人接收3个发射器信号的时间差,对机器人进行精确定位。Seong Jin Kim 等[24]在天花板上安装数个超声发射器,同时在机器人的不同位置安装超声接收器,通过接收信号得出每个发射器与不同接收器之间的距离从而判断机器人的方位。
激光导航通过激光传感器测距,原理与红外导航和超声导航基本相同,但是激光信号能量密度大,亮度高,颜色纯,因此激光导航的精度更高,测量的距离更远且分辨率更好,但是成本相对较高。激光导航主要通过激发发射器发射激光,经由被测物体发射后由机器人携带的激光接收器接收,得出机器人的位置与方向。
2.4 卫星导航
卫星导航最开始应用于军事领域,通过给机器人安装卫星信号接收系统,利用全球导航卫星系统提供的位置、速度、时间等信息来完成导航。之后,民用卫星导航的精度逐渐得到提高,而卫星导航不受地形,环境等的影响,可提供全球性的导航,因此卫星导航的应用范围较广,但导航精度不高。由于卫星探测并不能穿透建筑物,卫星导航无法进行室内导航,通常需要其他方式协助。Lim D.等[25]建立了网络协助的GPS 导航系统,实现了室内卫星导航。而Hada 等[26]仿照GPS 的工作原理,利用分布在室内各处的摄像机,实现了一个室内GPS 系统(iGPS)。iGPS 导航系统因其精度高,实时性好等优点,逐渐被学者们所关注,并越来越多地应用于服务机器人导航中。
2.5 视觉导航
人类从外界获取的信息约有80%是由视觉获取的,视觉信息量巨大,获得的信息全面且利用率高[27]。而研究人类视觉的原理并将此应用于机器人系统中是人们不断追求和探索的目标。如今,机器视觉技术已广泛应用于服务机器人导航系统。视觉导航主要通过在机器人上装载摄像机,获取机器人周围环境的视觉信息,通过图像处理完成障碍物以及路标的识别,得到导航参数并完成导航[28]。也有学者将摄像机安装在机器人工作区域完成导航[29],这种方法可以实时获得机器人在工作区域的全局方位,但只适用于服务机器人室内导航。
根据摄像机数目的不同,视觉导航分为单目视觉导航,双目视觉导航以及多目视觉导航。单目视觉系统计算量小,算法已经较为成熟,但其视野范围有限;双目视觉系统能够获得较为全面的环境信息,并且能够通过立体匹配得到场景中的深度信息,实现准确的三维定位;多目视觉系统可以观测到环境的不同方位,但其结构复杂,且需要处理的信息量过大,目前针对多目视觉的研究相对较少。因此,双目视觉技术经常被用于服务机器人的视觉导航中[30]。视觉导航因其获取信息完整,定位精度高,智能化水平高等优点,在服务机器人的应用上有诸多优势,但其也存在不足,比如,视觉导航需要处理的信息量较大,且远距离导航的精度较低,这就需要通过改进视觉导航相关算法[31]或将视觉导航与其他导航方式结合来改善。
3 服务机器人导航需解决的主要问题
无论采用以上何种导航方式,开发服务机器人导航系统的目标均可描述为:根据需求引导机器人自主地移动到操作区域,并最终完成特定任务。实现服务机器人导航的一般过程如图3 所示。在这个过程中,需解决两个主要问题:我在哪儿,即机器人定位问题;我该如何去往工作区域,即路径规划问题。
3.1 机器人定位
在服务机器人导航的过程中,机器人往往需要通过自主定位技术来确定当前自身在环境中所处的位置及方向。为了安全,可靠地完成导航任务,研究更加精确的定位方法是必不可少的。机器人定位技术主要有相对定位和绝对定位两种。航位推算法是较为传统的相对机器人定位方法,机器人在已知初始位置和方向的情况下,在移动的同时利用装载的加速度计,罗经,陀螺仪等传感器得到机器人所走路程,从而实现机器人定位[32],然而这种方法的定位误差会随着机器人所走路程的增加而累积。而基于绝对定位的研究有:利用摄像机[33]得到机器人所处环境的基本信息,实现机器人定位;通过超声波传感器[34]获取位置信息以及障碍物方位;GPS[35]也是常用的绝对定位方法,通过机器人上安装的GPS接收器接收卫星信号,从而得到机器人方位信息。但这些方法的定位精度会受到光线等随机环境因素的影响。因此有学者进行基于概率的绝对定位,计算机器人在空间中所处位置的概率分布,得出机器人最可能的位置,提高机器人定位精度[36]。另外,地图匹配定位法[37]通过传感器探测周围环境并进行局部地图构建,从而与机器人预先储存的地图进行对比确定机器人所处位置,该方法对机器人整个工作环境区域认识较为全面。
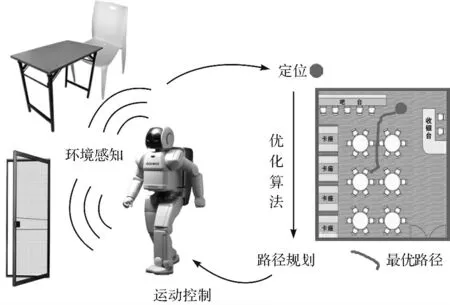
图3 服务机器人导航的实现过程
随着无线信息网络相关技术的发展,无线射频识别(RFID)定位方法[38-39]逐渐进入人们的视线,该方法主要通过读取器接收无线射频标签的ID 码和其他信息并存储,从而得到机器人的具体方位。RFID 定位方法具有非接触、高效率、低成本等优点,是服务机器人定位技术的一个研究趋势[40]。WiFi 定位技术是目前较为流行的基于无线局域网定位技术。通过各WiFi接入点与机器人的距离判断机器人所处位置[41],或在运动过程中通过将接受到的WiFi 信号强弱与机器人储存的WiFi 地图进行匹配,得到机器人方位[42]。该技术具有无需布线、高效率、覆盖范围广等优点。
3.2 路径规划
路径规划就是机器人遵从一定的准则,规划一条从起始点到达目标点与障碍物无碰撞的最优路径,从而解决服务机器人如何从所处位置到达操作地点的问题。而路径规划过程中所需要遵守的准则可以是路程最短、时间最少或者能源消耗最小等,其中路程最短是目前最常被采纳的准则[43]。根据所得到环境信息的不同,路径规划的算法可以分为两种:离线路径规划和在线路径规划。在已知固定障碍物信息以及移动障碍物运动轨迹的情况时,机器人进行离线路径规划(也称全局路径规划);而当这些信息未知或机器人工作在动态环境中时,机器人只能依靠传感器获得周围环境信息,进行在线路径规划(也称局部路径规划)。最基本的全局路径规划算法是结构空间法,可视图法[44]以及单元分解法[45]等,这些方法被提出之后,学者们对此展开了深入研究并进行了拓展及应用,同时越来越多的算法被用于全局路径规划中,如改进后的遗传算法[46]、神经网络[47]、蚁群算法[48]等。然而只研究全局路径规划算法是不切实际的,服务机器人通常需要在动态环境中工作,且环境中障碍物的运动往往是随机的,因此研究者们越来越重视局部路径规划算法的研究。比较常用的局部路径规划方法有人工势场法[49]、向量场矩阵法[50]等。同时学者们一直致力于研究更高效的局部路径规划算法,改进后的人工势场法[51]、遗传算法[52]、粒子群优化算法[53]等均被用于局部路径规划中。
未来服务机器人的工作环境将会更加复杂且变化迅速,例如穿过拥挤的人群传送物品,针对这种情况,Andrey V.Savkin 等[54]提出了一种基于环境集成信息的路径规划算法,该算法可以在不获取障碍物尺寸以及速度信息的情况下实现导航。关于路径规划的相关算法及其在服务机器人上的应用还可参考P.Raja和赵晓东等[55]的综述文章。
4 服务机器人导航技术的研究趋势
4.1 更高的智能化水平
随着科学技术的进步,服务机器人有着越来越广阔的发展前景,服务机器人导航技术也在向着更加智能化的方向发展。而智能空间[56]、机器人强化学习[57]等在服务机器人导航中的应用,也提高了服务机器人导航的智能化水平。但是目前的服务机器人导航水平限制了机器人在愈加复杂的动态环境中完成复杂任务的能力,不能满足现今人们对于服务机器人的智能化需求。因此,研究更高水平的机器算法以及人工智能以提高导航智能化水平是服务机器人导航技术的研究趋势之一。
4.2 更高的导航精度和实时性
学者们一直致力于研究更好的导航方案,因为服务机器人领域是一个集各学科为一体的研究领域,而导航技术是该领域的一项关键技术,它直接影响服务机器人完成任务的可能性。而更高的导航精度以及更好的导航实时性,能够促使服务机器人更安全且更好地完成任务。通过结合几种导航技术、改进导航定位以及路径规划的算法[58]等方式,制定精度高、实时性好的导航方案是未来服务机器人的一个研究趋势。
4.3 更高的导航可靠性
通常情况下,服务机器人通过一个传感器并不能获得完整的环境信息,多传感器融合技术综合多个传感器的感知数据信息,产生更可靠、更准确或更精确的信息。多传感器融合技术在服务机器人导航中的应用,可以有效得提高机器人导航可靠性,提高导航效率。目前应用较多的是将视觉传感器与其他传感器获取的信息相融合[59],获得更全面的环境信息并进行导航。而研究更高水平、更高可靠性的多传感器信息融合技术也是未来服务机器人导航的研究趋势之一[60]。
5 结束语
导航技术是服务机器人开发过程中涉及的核心关键技术,其研究进展也推动着服务机器人的发展。本研究分析并比较了目前较为常见的导航技术,包括磁导航、惯性导航、传感器导航和视觉导航等。通过综述其优、缺点可以看出,这些技术均存在局限性,有一定的适用范围,应结合具体的工作环境以及任务要求进行选择。同时,笔者对导航所涉及的两个过程,机器人定位以及路径规划的相关算法进行了整理。学者们针对这些技术以及算法已经进行了大量的研究,然而很多研究成果并未应用于实践中,因此服务机器人智能化水平仍有待提升。
随着计算机技术,传感技术等的发展,人们对服务机器人导航自主性的要求越来越高。对此,服务机器人导航技术有以下几个问题需进一步研究:通过研究更高水平的机器算法来提高机器人智能水平;通过融合多种导航技术或算法来提高机器人精度和可靠性。而随着计算机技术、传感技术等的发展,未来服务机器人将会成为一个快速发展的产业,为人们带来越来越方便的服务。
[1]Computing Community Consortium.A roadmap for US robotics:From Internet to robotics[J].Computing Community Consortium:The United States of America,2009.
[2]CAO Y U,FUKUNAGA A S,KAHNG A B.Cooperative mobile robotics:Antecedents and directions[J].Autonomous Robots,1997,4(1):7-27.
[3]王田苗,陶 永,陈 阳.服务机器人技术研究现状与发展趋势[J].中国科学:信息科学,2012,42:1049-1066.
[4]SICILIANO B,KHATIB O.Springer Handbook of Robotics[M].New York:Springer,2008.
[5]MENG Q,LEE M H.Design issues for the elderly[J].Advanced Engineering Informatics,2006,20:171-186.
[6]International federation of robotics.World robotics 2011 service robots.http://www.ifr.org/service-robots/statistics/
[7]MARCONI L,BASILE F,CAPRARI G,et al.Aerial Service Robotics:the AIRobots Perspective[C]//International Conference on Applied Robotics for the Power Industry(CARPI),2012:64-69.
[8]SRINIVASA S S,FERGUSON D,HELFRICH C J,et al.HERB:a home exploring robotic butler[J].Autonomous Robots,2010,28(1):5-20.
[9]Breuer T,Macedo G R G,Hartanto R,et al.Johnny:an autonomous service robot for domestic environments[J].Journal of Intelligent & Robotic Systems,2012,66:245-272.
[10]Schiffer S,Ferrein A,Lakemeyer G.CAESAR:an intelligent domestic service robot[J].Intelligent Service Robotics,2012.
[11]Zhao L Y,Li R F,Zang T Y,et al.A Method of Landmark Visual Tracking for Mobile Robot[C]//The 2008 International Conference on Intelligent Robotics and Applications,2008:901-910.
[12]于清晓.轮式餐厅服务机器人移动定位技术研究[D].上海:上海交通大学机械与动力学院,2013.
[13]Haverinen J,Kemppainen A.Global indoor self-localization based on the ambient magnetic field[J].Robot.Robotics and Autonomous Systems,2009,57(10):1028-1035.
[14]韩金华,王立权,孟庆鑫.护理助手机器人磁导航方法研究[J].仪器仪表学报,2009,30(4):834-839.
[15]Storms W,Shockley J,Raquet J.Magnetic field navigation in an indoor environment[C]//Ubiquitous Positioning Indoor Navigation and Location Based Service(UPINLBS).IEEE,2010:1-10.
[16]Angermann M,Frassl M,Doniec M,et al.Characterization of the indoor magnetic field for applications in localization and mapping[C]//Indoor Positioning and Indoor Navigation,2012.
[17]Grand E L,Thrun S.3-Axis Magnetic Field Mapping and Fusion for Indoor Localization[C]//Multisensor Fusion and Integration for Intelligent Systems (MFI).IEEE,2012:358-364.
[18]汪剑鸣,王 曦,王胜蓓,等.室内惯性/视觉组合导航地面图像分割算法[J].中国惯性技术学报,2011,19(05):553-558.
[19]王 聪,孙 炜.基于惯性导航与立体视觉的风管清扫机器人同时定位与地图创建方法[J].机械工程学报,2013,49(23):59-67.
[20]Lupton T,Sukkarieh S.Visual-Inertial-Aided Navigation for High-Dynamic Motion in Built Environments Without Initial Conditions[J].IEEE Transactions on Robotics,2012,28(01):61-76.
[21]Lee S.Use of infrared landmark zones for mobile robot localization[J].Industrial Robot:An International Journal,2008,35(2):153-159.
[22]Krejsa J,Vechet S.Infrared Beacons based Localization of Mobile Robot[J].Electronics and Electrical Engineering,2012,1(117):17-22.
[23]YAZICI A,YAYAN U,YÜCEL H.An Ultrasonic Based Indoor Positioning System[C]//Innovations in Intelligent Systems and Applications(INISTA),IEEE,2011:585-589.
[24]Kim S J,Kim B K.Accurate Hybrid Global Self-Localization Algorithm for Indoor Mobile Robots With Two-Dimensional Isotropic Ultrasonic Receivers[J].IEEE Transactions on Instrumentation and Measurement,2011,60(10):3391-3404.
[25]Lim D,Lee S,Cho D.Design of an assisted GPS receiver and its performance analysis[J].IEEE International Symposium on Circuits and Systems,2007:1742-1745.
[26]Hada Y,Takase K.Multiple mobile robot navigation using the indoor global positioning system(iGPS)[C]//Intelligent Robots and Systems.IEEE,2001,2:1005-1010.
[27]赵 鹏.机器视觉研究与发展[M].北京:科学出版社,2012:1-2.
[28]Cunha J,Pedrosa E,Cruz C,et al.Using a Depth Camera for Indoor Robot Localization and Navigation[J].DETI/IEETA-University of Aveiro,Portugal,2011.
[29]Chugo D,Matsushima S,Yokota S,et al.Camera-based Indoor Navigation for Service Robots[C]//SICE Annual Conference,2010:1008-1013.
[30]Budiharto W,Santoso A,Purwanto D,et al.Multiple Moving Obstacles Avoidance of Service Robot using Stereo Vision[J].Telecommunication Computing Electronics and Control,2011,9(03):433-444.
[31]Budiharto W,Santoso A,Purwanto D,et al.A Navigation System for Service Robot using Stereo Vision and Kalman Filtering[C]//Control,Automation and Systems,2011:1771-1776.
[32]Borenstein J,Feng L.Gyrodometry:A new method for combining data from gyros,and odometry in mobile robots[C]//Proceedings of IEEE International Conference on Robot Automation,1996:423-428.
[33]Xu D,Han L W,Min T,et al.Ceiling-based visual positioning for an indoor mobile robot with monocular vision[J].IEEE Transactions on Industrial Electronics,2009,56(05):1617-1628.
[34]Choi B S,Lee J J.Localization of a mobile robot based on an ultrasonic sensor using dynamic obstacles[J].Artificial Life and Robotics,2008,12(1/2):280-283.
[35]Gao C,Sands M,Spletzer J R.Towards Autonomous Wheelchair Systems in Urban Environments[C]//Field and Service Robotics.Springer Berlin Heidelberg,2010:13-23.
[36]ROWEKAMPER J,SPRUNK C,TIPALDI G D,et al.On the position accuracy of mobile robot localization based on particle filters combined with scan matching[C]//Intelligent Robots and Systems (IROS),2012 IEEE/RSJ International Conference on.IEEE,2012:3158-3164.
[37]Lee D,Chung W,Kim M.A Reliable Position Estimation Method of the Service Robot by Map Matching[C]//Proceedings of the IEEE International Conference on Robotics and Automation,2003:2830-2835.
[38]Yu Q X,Yuan C,Fu Z,et al.Research of the Localization of Restaurant Service Robot[J].International Journal of Advanced Robotic Systems,2010,7(3):227-238.
[39]Yu Q,Yuan C,Fu Z.An autonomous restaurant service robot with high positioning accuracy[J].Industrial Robot:An International Journal,2012,39(3):271-181.
[40]Zhou J Y,Shi J.RFID localization algorithms and applications-a review[J].Journal of Intelligent Manufacturing,2009,20:695-707.
[41]Olivera V M,Plaza J M C,Serrano O S.WiFi localization methods for autonomous robots[J].Robotica,2006,24:455-461.
[42]Biswas J,Veloso M.WiFi Localization and Navigation for Autonomous Indoor Mobile Robots[C]//2010 IEEE International Conference on Robotics and Automation,2010:4379-4384.
[43]Raja P,S.Pugazhenthi.Optimal path planning of mobile robots:A review[J].International Journal of Physical Sciences,2012,7(9):1314-1320.
[44]Lozano-Pérez T,Wesley M A.An algorithm for planning collision-free paths among polyhedral obstacles[J].Communications of the ACM,1979,22(10):560-570.
[45]Lozano-Pérez T.Spatial planning:A configuration approach[J].IEEE Transactions on Computers,1983,32(3):108-120.
[46]Hu J,Zhu Q B.Multi-objective Mobile Robot Path Planning Based on Improved Genetic Algorithm[C]//International Conference on Intelligent Computation Technology and Automation,2010,752-756.
[47]Jung I K,Hong K B,Hong S K,et al.Path planning of mobile robot using neural network[J].in Proc.IEEE Int.Symp.Ind.Electron.,Bled,Slovenia,1999,3:979-983.
[48]Buniyamin N,Sariff N,Wan Ngah W A J.,et al.Robot global path planning overview and a variation of ant colony system algorithm[J].International journal of mathematics and computers in simulation,2011,5:9-16.
[49]Khatib O.Real time obstacle avoidance for manipulators and mobile robots[J].Int.J.Robot.Res.,1986,5(1):90-98.
[50]Latombe J C.Robot motion planning.Kluwer[J].Academic Publisher,Boston,1991.
[51]Vadakkepat P,Tan K C,Liang W M.Evolutionary artificial potential fields and their application in real time robot path planning[C]//Proceedings of the Congress on Evolutionary Computation,2000:256-263.
[52]Yun S C,Parasuraman S,Ganapathy V.Dynamic Path Planning Algorithm in mobile robot navigation[J].IEEE Symposium on Industrial Electronics and Applications,2011:363-369.
[53]Zhang Q R,Gu G C.Path planning based on improved binary particle swarm optimization algorithm[C]//Proceedings of the IEEE International Conference on Robotics,Automation and Mechatronics,2008:462-466.
[54]Savkin A V,Wang C.Seeking a path through the crowd:Robot navigation in unknown dynamic environments with moving obstacles based on an integrated environment representation[J].Robotics and Autonomous Systems,2014,62:1568-1580.
[55]赵晓东,鲍 方.清洁机器人路径规划算法研究综述[J].机电工程,2013,30(11):1440-1444.
[56]Zhou F Y,Wang G Q,Tian G H,et al.A Fast Navigation Method for Service Robots in the Family Environment[J].Journal of Information & Computational Science,2012,9(12):3501-3508.
[57]高 阳,陈世福,陆 鑫.强化学习研究综述[J].自动化学报,2004,30(1):86-100.
[58]Tang L,Dian S,Gu G,et al.A novel potential field method for obstacle avoidance and path planning of mobile robot[C]//Computer Science and Information Technology(ICCSIT),International Conference on.IEEE,2010,9:633-637.
[59]Germa T,Lerasle F,Ouadah N,et al.Vision and RFID data fusion for tracking people in crowds by a mobile robot[J].Computer Vision and Image Understanding,2010,114:641-651.
[60]Luo R C,Chang C C.Multisensor Fusion and Integration:A Review on Approaches and Its Applications in Mechatronics[J].IEEE Transactions on Industrial Informatics,2012,8(1):49-60.
