三轴车辆全轮转向滑模控制器设计
2015-11-18袁磊刘维平刘西侠
袁磊,刘维平,刘西侠
(装甲兵工程学院机械工程系,北京100072)
三轴车辆全轮转向滑模控制器设计
袁磊,刘维平,刘西侠
(装甲兵工程学院机械工程系,北京100072)
为深入研究三轴全轮转向车辆的动力学行为,建立了考虑车轮非线性特性和车辆载荷变化的整车模型。为提高三轴全轮转向车辆的操纵稳定性,以三轴双前桥转向车辆横摆率和零质心侧偏角为理想跟踪目标,基于滑模变结构控制理论,设计了三轴车辆全轮转向滑模控制器。对比了双前桥转向车辆、零质心侧偏角比例控制全轮转向车辆和滑模控制全轮转向车辆在不同工况下的响应性能,结果表明:设计的全轮转向滑模控制器可将车辆质心侧偏角控制在较小范围,能很好地跟随车辆理想横摆角速度,同时还能够较好地抵抗侧向风和路面条件变化的干扰。
控制科学与技术;三轴车辆;全轮转向;理想模型;滑模控制器
0 引言
多轴车辆行驶过程中,常遇到高速转弯、变道行驶、弯道加减速等工况,同时不可避免湿滑路面、冰雪路面等恶劣工况转向,这对三轴车辆的操纵稳定性提出了更高的要求。与传统的前轮转向或双前桥转向多轴车辆相比,多轴全轮转向车辆具有更为良好的转向灵活性和操纵稳定性[1-2]。三轴车辆是多轴车辆的一种典型代表,通常通过在后两轴增加电控液压助力转向系统实现全轮转向[3-5]。全轮转向车辆的核心是转向控制器,控制器一般基于前轴车轮转角和车辆状态参数,实现对后两轴车轮转角的控制。
目前,关于两轴车辆全轮转向控制策略的研究很多,例如零质心侧偏角比例控制、最优控制、鲁棒控制、模糊控制、滑模控制等[6]。然而,这些控制策略的研究尚未完全扩展到三轴车辆上。文献[7-9]基于三轴车辆线性二自由度模型分别研究了三轴车辆零质心侧偏角比例控制、最优控制和鲁棒控制。这些控制策略的研究中,车辆建模均未考虑车轮非线性、车辆载荷转移以及路面条件变化等因素;控制策略本身也大多忽略对外界干扰的抑制,鲁棒性较差,这都导致了这些控制策略很难应用于车辆的高速转向。
因此,为分析三轴全轮转向车辆高速操纵稳定性问题,本文建立了包含车轮非线性特性和车辆载荷转移的三轴车辆非线性整车模型。针对车辆实际转向工况中不确定干扰因素导致的系统鲁棒性问题,基于滑模控制理论,通过跟踪理想模型,并以横摆角速度和质心侧偏角为反馈量设计了滑模控制器。最后,通过二自由度模型对比验证了该控制器的有效性,利用车辆非线性模型分析了控制器性能。
1 三轴车辆动力学建模
1.1 车轮模型
车辆所受的地面作用力是通过车轮传递的,车轮模型对车辆的侧向动力学行为具有重要影响。车辆高速转向时,由于车轮载荷和路面条件变化引起的车轮受力变化较为明显,车轮呈现出较强的非线性特性[10]。因此,为体现车轮非线性特性,本文采用具有较高精度的“Fiala-桥石”表达式[11]。其中车辆的侧向力计算式为
式中:Fy_i(i=fl,fr,ml,mr,rl,rr)为各车轮侧向力,fl、fr、ml、mr、rl、rr分别为前、中、后轴的左右车轮;Fz_i(i=fl,fr,ml,mr,rl,rr)为各车轮正压力;αi(i=fl,fr,ml,mr,rl,rr)为各车轮侧偏角;μ为地面摩擦系数。
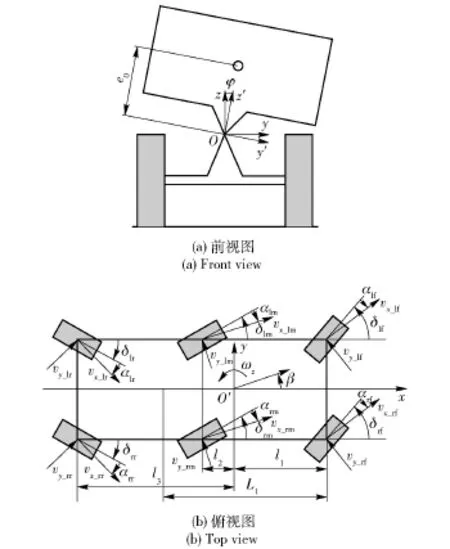
图1 车辆模型运动参数Fig.1 Vehicle movement parameters of model
1.2 车辆动力学模型
车辆动力学模型包括车辆侧向运动、横摆运动和簧上质量侧倾运动。模型建立过程中,进行如下假设:忽略车身的弹性变形;车辆总质量集中于质心;非簧载质量平均分布于各个车轮;车辆侧倾轴线呈水平;忽略路面不平度输入;忽略变形转向角和侧倾转向角。建立车辆前视图和俯视图模型,如图1所示。图1中,O点为车辆静止时,质心垂线与侧倾轴的交点,以其为原点,得到固结于簧载质量和非簧载质量的坐标系Ox′y′z′和Oxyz,φ为车身侧倾角,e0为簧载质量质心到x轴的距离,ωz为车辆横摆角速度,lj(j=1,2,3)为车辆质心到第j轴的距离,L1为车辆转向中心到一轴的距离,vx_i、vy_i(i=fl,fr,ml,mr,rl,rr)为各车轮纵向和侧向速度,δi(i=fl,fr,ml,mr,rl,rr)为各车轮转角。
侧向运动
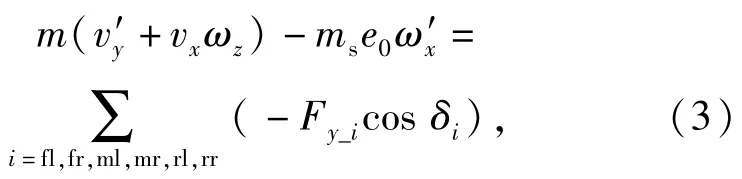
式中:m为车辆总质量;ms为车辆簧载质量;vx为纵向车速;vy为侧向车速;ωx为车身侧倾角速度。
横摆运动
式中:Ix和Iz分别为车身绕x轴和z轴的转动惯量;Ixz为车身绕x轴和z轴的惯性积。
簧上质量侧倾运动

式中:Kφ为等效车身侧倾角刚度;Cφ为等效车身侧倾阻尼系数。
车轮中心运动速度
车轮侧偏角

t时刻车辆质心坐标
式中:b为左右车轮距离的1/2;θ为车辆质心偏航角;x(t)、y(t)为t时刻整体坐标系中车辆质心坐标;x0、y0为车辆质心的初始坐标。
2 滑模控制器设计
2.1 车辆控制器模型
滑模控制器以三轴车辆线性二自由度模型为基础建立[12],并考虑车轮侧向刚度变化以及车辆侧向扰动,模型为(10)式。

式中:ΔA、ΔBu、ΔBw为系统参数摄动矩阵;Fd为侧向风力;相应矩阵为

式中:Kαj(j=1,2,3)为j轴等效车轮侧偏刚度;ΔKαj(j=1,2,3)为j轴等效车轮侧偏刚度的摄动值;Ld为侧向风力作用中心到一轴的距离。
由于Bu0为满秩且可逆矩阵,(10)式可变形为(11)式。

式中:d(x,t)为整个系统的不确定性因素,

2.2 车辆理想模型
理想三轴全轮转向车辆的转向灵敏性应和双前桥转向相同,以使普通双前桥转向车辆驾驶员能够较好地适应全轮转向车辆的驾驶,同时还应该使车辆侧偏角基本保持为0.依据以上要求,参考模型为(13)式。

2.3 滑模控制器设计
全轮转向滑模控制器的滑模面定义为系统与参考模型的侧向速度与横摆角速度的误差表面。可选择滑模面S(x,t)为(14)式。

式中:e=X-Xd为实际系统与参考模型之间的跟踪误差;C为滑模系数矩阵;c1、c2为待定参数。

为有效改善系统的动态响应,缩短到达滑模面的时间,采用等效滑模控制,通过等效控制保证系统的状态在滑模面上,切换控制保证系统不离开滑模面[13]。因此,取和d(x,t)=0可得等效控制律Ueq.

为保证系统对外界干扰和车轮参数摄动的有效抑制,进一步设计切换控制律Urob.

因此,控制律可表示为(18)式。

为减弱滑动,可假设:
因此,当系统的不确定性因素满足(21)式时,所设计的全模控制器能很好地抑制系统参数摄动和外界干扰。

另外,为了减少抖动,符号函数sgn(si)需用一个饱和函数sat(si)替代,如(22)式。
3 仿真分析
为初步验证滑模控制器的有效性,首先采用线性二自由度车辆模型,对其在外界侧风干扰下的响应情况进行对比分析。为进一步验证控制器对复杂车辆模型的控制效果,采用非线性整车模型,选取前轮转角阶跃输入和不同附着条件路面下前轮转角正弦输入两种工况,对比分析控制器控制效果。
3.1 控制器有效性对比验证
为验证控制器的控制效果,选择线性二自由度车辆模型对比分析双前桥转向车辆、零质心侧偏角比例控制全轮转向车辆和滑模控制全轮转向车辆在侧风干扰下的响应情况。仿真工况:设置车速为20 m/s,1 s时进行前轮转角为3°的角阶跃输入,仿真时间为4 s时,在质心后0.2 m处设置一持续2 s、大小为3 000 N的侧向风干扰,仿真总时间为8 s,结果如图2所示。
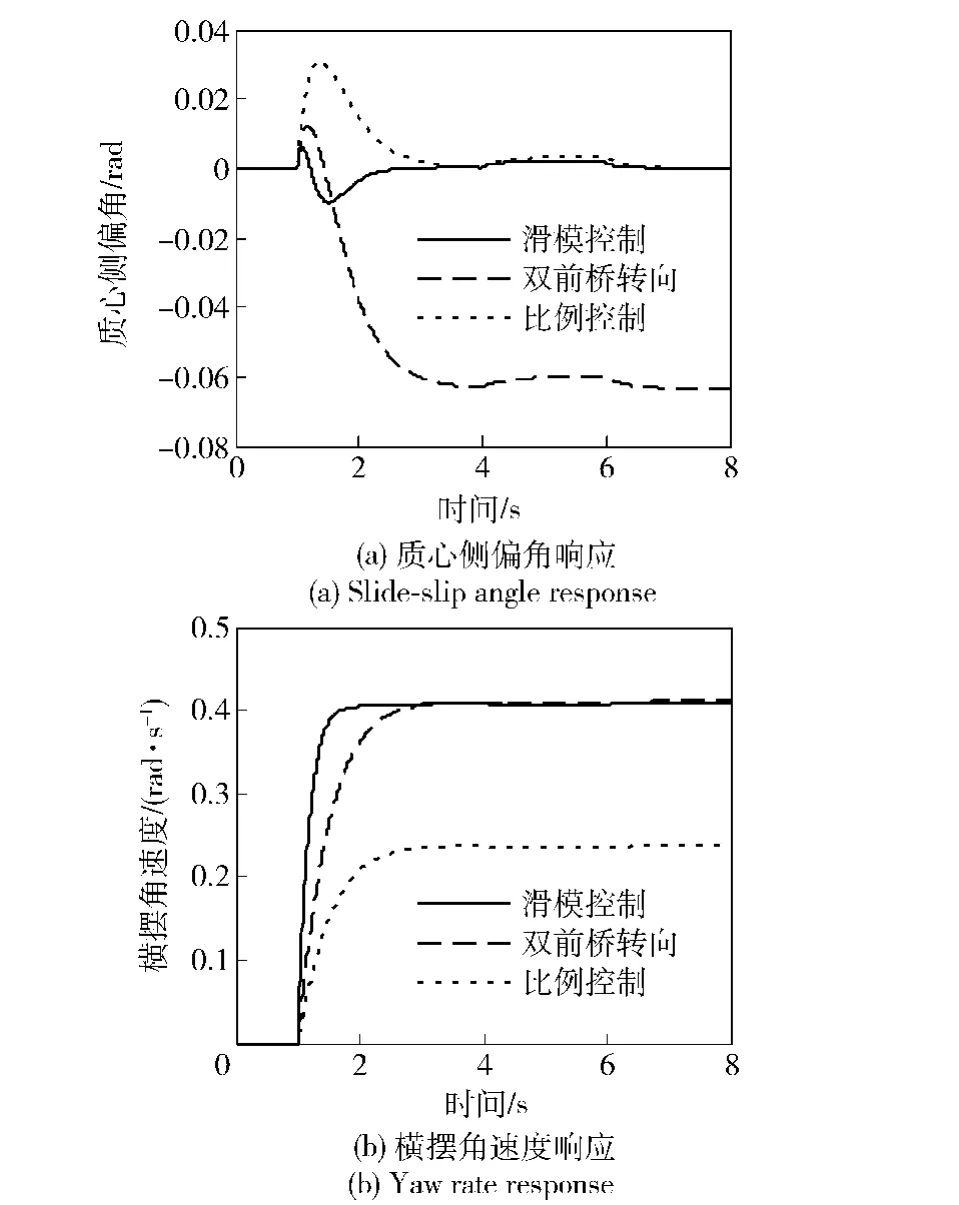
图2 前轮角阶跃输入响应曲线Fig.2 The front wheel angle step response
由图2可看出,相比双前桥转向和零质心侧偏角比例控制全轮转向车辆,滑模控制全轮转向车辆的质心侧偏角基本保持为0 rad,横摆角速度能够较好地跟随双前桥转向车辆的理想值;4 s时,在侧风干扰下,滑模控制的全轮转向车辆质心侧偏角变化较小,横摆角速度基本没有变化,即车辆能够很好地跟随理想的转向特性,验证了该全轮转向滑模器具有良好的鲁棒性。
3.2 车辆性能仿真
三轴车辆非线性模型考虑了车辆载荷变化和车轮非线性,可模拟路面摩擦系数和车轮载荷变化的影响,且对车辆行驶轨迹预测更加准确。此处,分两种工况进行仿真研究:车辆定前轮转角输入仿真和车辆在不同附着条件路面下前轮转角正弦输入仿真。
仿真工况1:设置车速为25 m/s,前轮转角输入为3°且固定不动,1 s后触发位于质心后0.2 m处,大小为3 000 N的侧向风输入,仿真总时间为8 s,结果如图3所示。
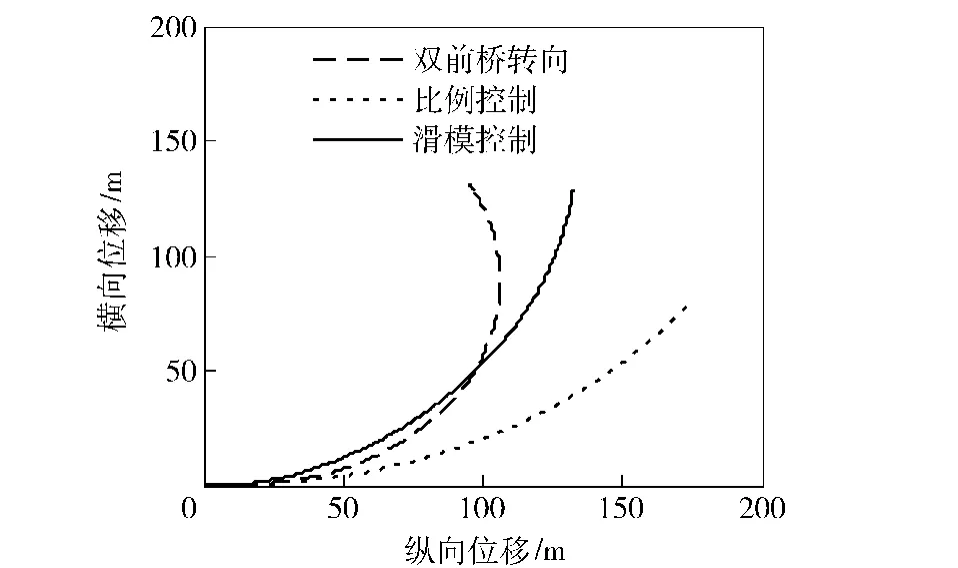
图3 车辆行驶轨迹Fig.3 The curves of vehicle trajectory
对比滑模控制全轮转向车辆和双前桥转向车辆发现,滑模控制全轮转向车辆开始侧向位移较大,但很快保持较为合理的侧向轨迹,双前桥转向车辆受到侧向风影响较为明显,侧向位移始终保持较大值,说明滑模控制全轮转向车辆具有一定的抗侧风稳定性。零质心侧偏角比例控制全轮转向车辆,高速横摆角速度增益较小,侧向位移始终较小。
仿真工况2:设置车速为25 m/s,选择道路摩擦系数μ分别为0.8(干水泥路面)和0.3(湿路面)的路面进行仿真,设置前轮转角输入为频率2 rad/s、幅值5°的正弦输入,结果如图4~图7所示。
由图4可知:滑模控制全轮转向车辆与原双前桥转向车辆具有相近的行驶轨迹,但滑模控制全轮转向车辆轨迹跟随性能较好。零质心侧偏角比例控制全轮转向车辆高速转向时响应始终较为迟缓。由图5可知:滑模控制全轮转向车辆质心侧偏角响应快,侧偏角幅值与零质心侧偏角比例控制策略的控制效果基本相同,都约为双前桥转向的.因此,可以说,滑模控制全轮转向车辆在保持稳定性的同时还具有较好的操控性能。
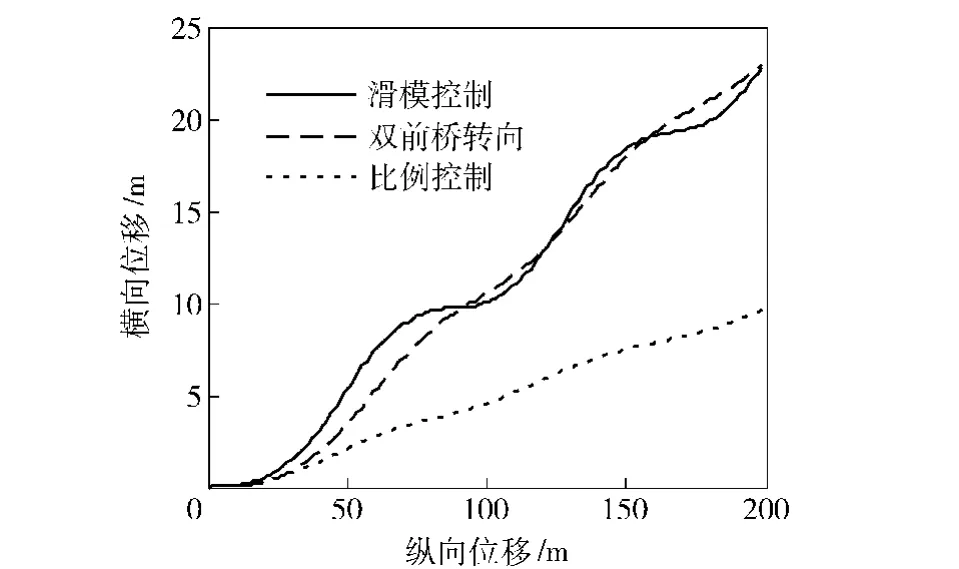
图4 车辆行驶轨迹(μ=0.8)Fig.4 The curves of vehicle trajectory(μ=0.8)
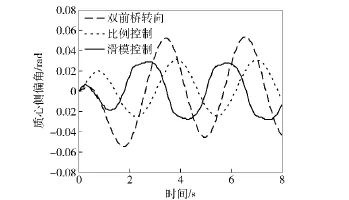
图5 车辆质心侧偏角响应(μ=0.8)Fig.5 Slide-slip angle response(μ=0.8)
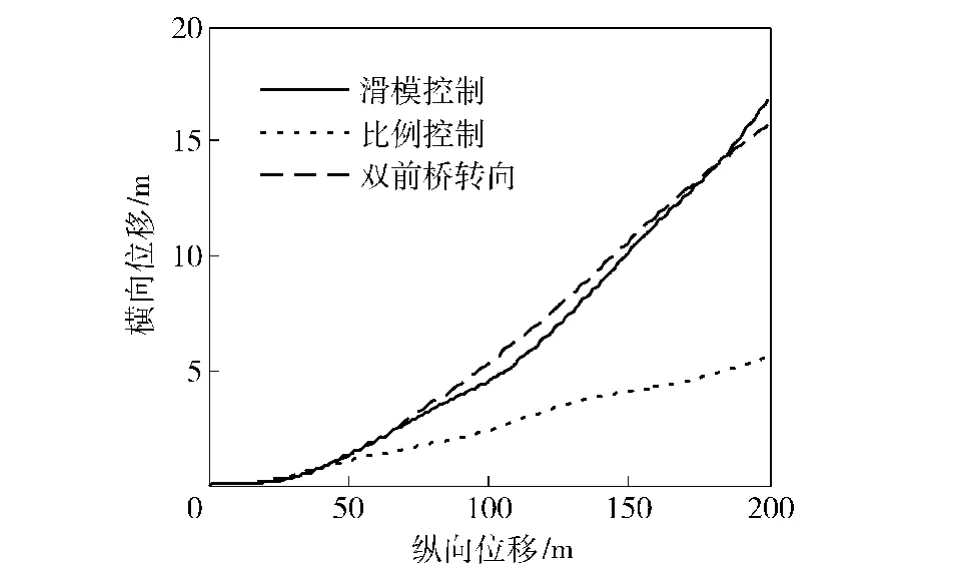
图6 车辆行驶轨迹(μ=0.3)Fig.6 The curves of vehicle trajectory(μ=0.3)
由图6可知:3种车辆的侧向位移动相比图4而言都同时减小了,但滑模控制全轮转向车辆对前轮角阶跃输入的响应依然较为明显,转向操纵性能较好。由图7可知:滑模控制全轮转向车辆的质心侧偏角和零质心侧偏角比例控制全轮转向车辆基本相同,波动较小,控制效果较好,此时双前桥转向车辆的质心侧偏角已经出现不稳定情况,车辆出现了侧滑。因此,可以说,在附着系数较低的路面上,滑模控制全轮转向车辆稳定性较好。
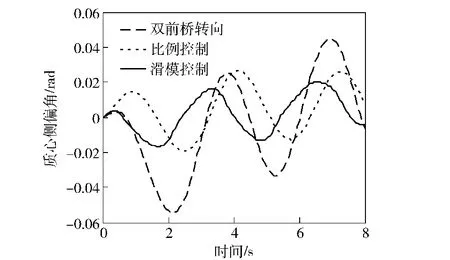
图7 车辆质心侧偏角响应(μ=0.3)Fig.7 Slide-slip angle response(μ=0.3)
4 结论
建立了包含车轮非线性和车辆载荷转移的三轴全轮转向车辆模型。设计了滑模控制器,控制器通过跟踪理想模型,实现对后两轴车轮转角的控制。仿真分析了滑模控制器在侧风干扰和路面条件较差环境下的鲁棒性,结果表明:
1)全轮转向滑模控制器能使车辆质心侧偏角基本保持为0 rad,横摆角速度较好地跟随理想值,且对外界干扰具有一定的抑制作用。
2)滑模控制全轮转向车辆与双前桥转向车辆具有相近的行驶轨迹,但稳定性更好;与零质心侧偏角比例控制全轮转向车辆相比,高速操纵性能更强。
3)滑模控制全轮转向车辆在低附着路面上依然具有较好的操纵稳定性,鲁棒性较好。
(
)
[1]Huh K,Kim J,Hong J.Handling and driving characteristics for six-wheeled vehicles[J].Journal of Automobile Engineering,2000,214(2):159-170.
[2]Li Y X,Wang Y C,Feng P F.Lateral dynamics of three-axle steering vehicle based zero vehicle sideslip angle control[J].AdvancedMaterials Research,2012,3(2):1682-1687.
[3]An S J,Lee H Y,Cho W K,et al.Development of steering algorithm for 6WS military vehicle and verification by experiment using a scale-down vehicle[C]∥Proceeding of International Symposium on Advanced Vehicle Control.Taibei,Taiwan:SAE,2006:245-250.
[4]刘少君.多轴车辆第三轴电控液压转向系统研究[D].合肥:合肥工业大学,2013. LIU Shao-jun.The research of electronically controlled hydraulic steering system for the third axle of multi-axle trucks[D].Hefei:Hefei University of Technology,2013.(in Chinese)
[5]李耀旭.三轴电液转向控制系统研究与开发[D].厦门:集美大学,2013. LI Yao-xu.Research and development of control system for threeaxle electro-hydraulic steering system[D].Xiamen:Jimei University,2013.(in Chinese)
[6]陈建松,陈南,殷国栋.考虑非线性特征的4WS车辆滑模鲁棒稳定性控制[J].东南大学学报:自然科学版,2010,40(5):969-972. CHEN Jian-song,CHEN Nan,YIN Guo-dong.Sliding mode robust control for 4WS vehicle based on non-linear characteristic[J]. Journal of Southeast University:Natural Science Edition,2010,40(5):969-972.(in Chinese)
[7]李炎亮,高秀华,张春秋,等.车载式自行火炮多桥动态转向系统[J].吉林大学学报:工学版,2006,36(3):321-326. LI Yan-liang,GAO Xiu-hua,ZHANG Chun-qiu,et al.Multi-axle dynamic steering system of truck-howitzer[J].Journal of Jilin U-niversity:Engineering and Technology Edition,2006,36(3):321 -326.(in Chinese)
[8]王树风,李华师.三轴车辆全轮转向最优控制[J].汽车工程,2013,35(8):667-672. WANG Shu-feng,LI Hua-shi.Optimal control of all-wheel steering in three-axle vehicle[J].Automotive Engineering,2013,35(8):667-672.(in Chinese)
[9]刘芹芹,高秀华,张小江.多轴转向车辆二自由度鲁棒控制[J].农业机械工程,2011,27(2):136-140. LIU Qin-qin,GAO Xiu-hua,ZHANG Xiao-jiang.Robust two-degree-freedom control for multi-axle steering vehicle[J].Transactions of the Chinese Society of Agriculture Engineering,2011,27(2):136-140.(in Chinese)
[10]喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005:34-37. YU Fan,LIN Yi.Vehicle system dynamic[J].Beijing:China Machine Press,2005:34-37.(in Chinese)
[11]Watts D J,Strogatz S H.Collective dynamic of small-world network[J].Nature,1999,393:440-442.
[12]袁磊,刘西侠,金毅,等.一种具有不同转向模式的多轴车辆设计[J].机械设计与制造,2012(10):33-35. YUAN Lei,LIU Xi-xia,JIN Yi,et al.Design for a multi-axis turning car at different steering models[J].Machinery Design& Manufacture,2012(10):33-35.(in Chinese)
[13]刘金琨.滑模变结构控制MATALAB仿真[M].北京:清华大学出版社,2012:15-17. LIU Jin-kun.Sliding mode control design and MATALAB simulation[M].Beijing:Tsinghua University Press,2012:15-17.(in Chinese)
[14]王丰尧.滑模变结构控制[M].北京:机械工业出版社,1995. WANG Feng-yao.Sliding mode control[M].Beijing:China Machine Press,1995.(in Chinese)
Design of Sliding Mode Controller for All-wheel Steering System of Three-axle Vehicle
YUAN Lei,LIU Wei-ping,LIU Xi-xia
(Department of Mechanical Engineering,Academy of Armored Force Engineering,Beijing 100072,China)
For further research on the dynamic behavior of three-axle vehicle with all-wheel steering system,an all-wheel steering vehicle dynamic model is built considering the nonliner characteristics and load changes of wheels.To improve the handling stability of three-axle vehicle with all-wheel steering system,an all-wheel steering controller is designed based on the siding mode variable structure control theory,which can follow a reference model that contains an ideal yaw rate of the double-front-axle steering vehicle and the zero side-slip model.The double-front-axle steering vehicle,the all-wheel steering vehicle with zero side-slip angle proportional controller and the all-wheel steering vehicle with sliding mode controller are compared under different conditions.The result shows that the siding mode controller can ensure the smaller slide-slip angle and the ideal yaw rate,which can resist the interference from lateral wind and road conditions.
control science and technology;three-axle vehicle;all-wheel steering;ideal model;sliding mode controller
U461.6
A
1000-1093(2015)08-1391-07
10.3969/j.issn.1000-1093.2015.08.003
2014-09-17
国家自然科学基金项目(51305457)
袁磊(1990—),男,博士研究生。E-mail:yuanlei110119@outlook.com;刘维平(1962—),男,教授,博士生导师。E-mail:lwpyxlzh@sohu.com