线控转向汽车防侧翻稳定性控制
2015-11-12王阳阳等
王阳阳等

摘要: 通过线控转向(SteerbyWire,SBW)系统控制汽车方向盘转角提高某汽车在极限行驶中抗侧翻能力.建立SBW整车模型,基于紧急避让、紧急掉头和蛇行运动等3种危险操纵稳定性工况分析,得出该车易侧翻的结论.提出基于横向载荷转移率(Lateral Load Transfer Ratio, LTR)的车辆动态防侧翻控制算法,通过SIMULINK与CarSim的联合仿真平台,建立转向优化控制模型.仿真结果表明在典型工况下该车防侧翻性能得到明显改善.
关键词:
汽车; 侧翻稳定性; 线控转向; 横向载荷转移率; 优化控制
中图分类号: U463.4文献标志码: B
0引言
随着汽车技术的发展,纯机械式已不再是转向动作实现的唯一方式,通过电信号发送转向指令的线控转向(SteerbyWire,SBW)技术已经开始被广泛关注.线控主动转向系统能够对汽车的轮胎角度和转向信号输入进行独立控制,相对于传统的机械转向,能将驾驶者的意图更迅捷地向车轮传递.在一些危险如侧滑、侧翻情况下,有利于提高汽车转向稳定性.
汽车侧翻稳定性一直是汽车主动安全性的重要指标.1998年美国加利福利亚科技学院喷气推进实验室的LEE建立车辆动态试验台,研究通过转向和防侧倾杆对车辆进行联合防止侧倾的控制方法.2007年爱尔兰国立梅努斯大学的SOLMAZ通过将汽车横向载荷转移率(Lateral Load Transfer Ratio, LTR)控制在一定范围内,提出防止主动转向汽车侧翻控制器的方法.2012年法国凡尔赛机器人实验室的IMINE等基于高阶动态滑移模型的仿真分析提出针对重型车辆的防侧翻控制方法.2013年东南大学交通学院的孙璐等建立三自由度车辆动力学闭环仿真模型,研究不同道路因素以及因素间交互作用对车辆侧翻的影响程度.2014年法国亚眠大学信息与系统实验室的DAHMANI等基于Takagi Sugeno(TS)模糊模型,进行考虑道路坡度的车辆侧翻预测方法的理论和实验研究.北京理工大学的施国标等应用虚拟前轮侧偏刚度的概念得到横摆角速度和质心侧偏角的反馈系数,分析虚拟前轮侧偏刚度系数对极点t频率特性等的影响.中国石油大学的于蕾艳等设计SBW系统的变传动比,主动控制前轮转角,提高汽车的操纵稳定性.湖南大学的赵威建立基于CarSim和LabVIEW平台的汽车SBW系试验台的在环系统仿真.同济大学的余卓平等[9]研究主动前轮转向对车辆操纵稳定性能的影响.丰田公司早在2008年就进行SBW系统的概念设计.[10]
综上,提高车辆侧翻稳定性的主要实现方式集中在结构和整车控制方面,通过转向控制侧倾受制于机械式转向系统.本文主要建立SBW汽车模型,仿真分析研究在紧急工况(紧急制动,紧急掉头和蛇行工况)下SBW系统的侧翻稳定性,并在此基础上建立SBW系统防侧翻控制模型,且对比各工况下改进前后车身侧倾的情况.结果表明优化控制后的SBW系统转向稳定性和车辆安全性明显提升.
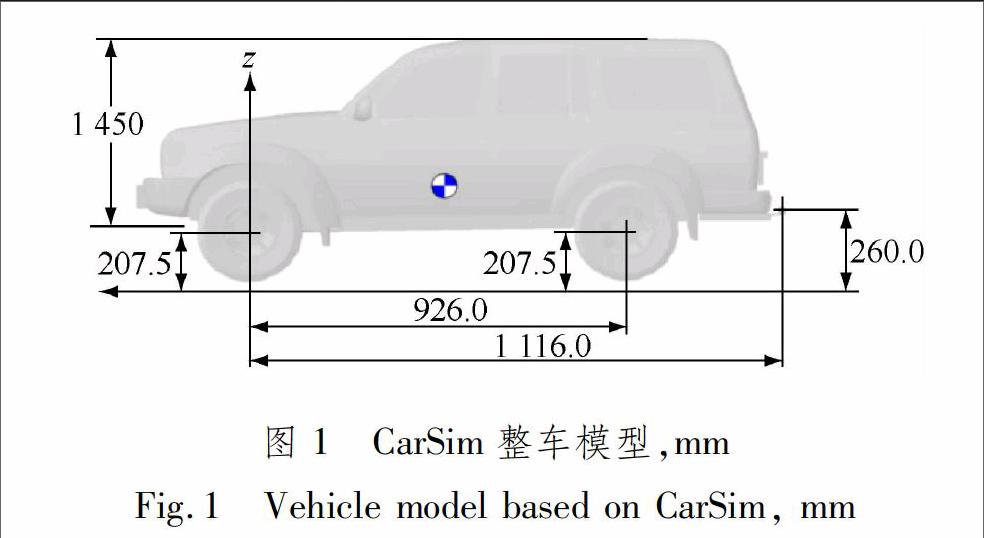
1线控转向整车模型
基于汽车动力学建模软件CarSim和整车参数,建立整车模型,见图1.
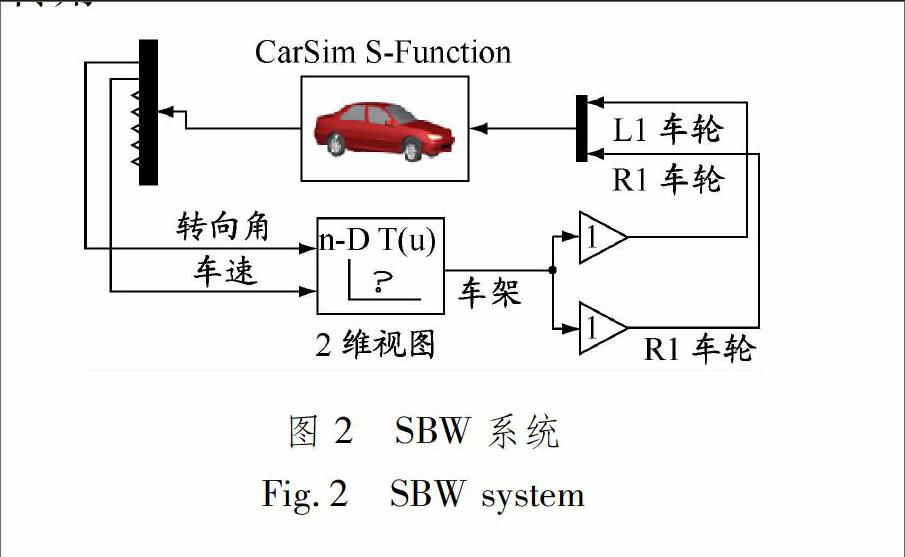
基于CarSim整车模型中的机械转向系统中方向盘转角与齿条位移、齿条位移与左右车轮转向角的拟合关系,利用CarSim与SIMULINK联合仿真技术,通过电机转角替代方向盘转角,建立包括SBW系统的整车模型见图2.从CarSim整车模型中获取车辆的方向盘转角和车速信号,查取二维表(转向盘到齿条的传递特性表),从而得到左前轮和左后轮的转角.
2整车稳定性分析
2.1紧急避让工况
在紧急避让工况下,以车辆侧向偏移量为输入,汽车从直线行驶快速达到5 m的侧向偏移量,再快速恢复到偏移量为0的状态.双移线试验中车身侧倾角时间曲线见图3.由此可知:当速度设置为80 km/h时,出现车身大幅度侧倾,有侧翻危险;当速度设置为90 km/h时,车辆中途侧翻.
速度为60 km/h时紧急避让工况下各轮垂直力时间曲线见图4.由此可知:当速度设置为60 km/h时,右侧车轮在9.2~10.5 s时间段内出现垂直力为0的情况;在8和11.8 s这2个时刻,左侧车轮地面垂直力接近于0,有侧翻危险.
2.2紧急掉头工况
在紧急调头工况下,对方向盘转角输入进行控制,从6 s时刻开始输入110°大小的阶跃转角,持续作用5 s后,倒转方向盘将转角减小为0.紧急掉头工况下车速20 km/h的车辆侧向加速度时间曲线见图5.在此工况中,以最低稳定速度20 km/h仿真便会在中途侧翻.
2.3蛇行工况
蛇行工况控制车辆的道路轨迹为左右摆动的蛇形轨迹,最大侧向偏移量为2 m,持续3个周期.蛇行试验中车身侧倾角时间曲线见图6.由此可知:当车速为50和60 km/h时,车身侧倾角稳定在一定的范围内,当车速为70 km/h时,车身侧倾角出现大幅波动并最终引起车辆侧翻.
车速60 km/h时各车轮垂直力时间曲线见图7.由此可知:在车速为60 km/h时,4个轮的垂直力不断波动变化,左侧车轮和右侧车轮都有为0的时刻,在这些时刻车辆都有侧倾危险.
4控制效果分析
4.1紧急避让工况
紧急避让试验优化前后车身侧倾角变化比较见图8.由此可知:优化控制后,当速度为80 km/h时,稳定性得到提高,车辆能平稳的行驶;当速度为90 km/h,车辆在双移线的中间段稳定行驶,但在最后回到原路线上时侧翻,然而90 km/h已经超过该车的最高车速,因此在允许车速内车辆稳定性通过该优化控制仍能达到理想行驶状态.
4.2紧急掉头工况
优化前后车身侧倾角变化见图9.由此可知:在没加稳定性优化控制算法前,当速度为20 km/h时,车辆中途侧翻;经优化控制后,当速度为20 km/h时,可以防止车辆侧翻.
4.3蛇行工况
蛇行试验车速为70 km/h时优化前后车身侧倾角的变化见图10.由此可知:在没有施加稳定性优化控制算法时,当速度设置为70 km/h时,车轮的地面支撑在行驶过程中会降低到0,车身摆动较大,并中途侧翻;优化控制后,车速为70 km/h时车辆能稳定地通过蛇行试验.
5结论
对线控转向汽车的防侧翻稳定性控制进行研究,得到如下结论.
1)利用CarSim和SIMULINK建立线控转向整车模型,对紧急避让、紧急调头和蛇行工况下的整车稳定性进行分析,得出该车易于侧翻的情况.
2)基于横向载荷转移率LTR指标,建立线控转向系统的SIMULINK防侧翻控制模型.
3)结果表明控制后的线控转向汽车车身侧倾角变化减小并趋于平稳,稳定行驶车速极限值提高,侧翻危险降低,转向稳定性和车辆安全性明显提升.
参考文献:
[1]LEE A Y. Coordinated control of steering and antiroll bars to alter vehicle rollover tendencies[J]. J Dynamic Sys Measurement & Control, 1998, 124(1): 127132.
[2]SOLMAZ S. A methodology for the design of robust rollover prevention controllers for automotive vehicles with active steering[J]. Int J Control, 2007, 11(80): 17631779.
[3]IMINE H, FRIDMAN L M, MADANI A T. Steering control for rollover avoidance of heavy vehicles[J]. IEEE Trans Vehicular Technol, 2012, 61(8): 34993509.
[4]孙璐, 游克思, 王易阳, 等. 道路因素对车辆侧翻的影响分析[J]. 东南大学学报(自然科学版), 2013, 43(3): 644648.
SUN Lu, YOU Kesi, WANG Yiyang, et al. Influence analysis of road conditions on vehicle rollover [J]. J Southeast Univ(Nat Sci), 2013, 43(3): 644648.
[5]DAHMANI H, OLIVIER P, HAJJAJI A E, et al. Observerbased robust control of vehicle dynamics for rollover mitigation in critical situations[J]. IEEE Trans Intelligent Transportation Sys, 2014, 15(1): 274284.
[6]施国标, 于蕾艳, 林逸. 线控转向系统的全状态反馈控制策略[J]. 农业机械学报, 2008, 39(2): 3032.
SHI Guobiao, YU Leiyan, LIN Yi. Research on full state feedback control strategy of steerbywire[J]. Trans Chin Soc Agriculture Machinery, 2008, 39(2): 3032.
[7]于蕾艳, 林逸, 施国标. 线控转向系统的主动转向控制策略研究[J]. 计算机仿真, 2008, 25(5): 233236.
YU Leiyan, LIN Yi, SHI Guobiao. Research on active steering control strategy of steerbywire system[J]. Comput Simulation , 2008, 25(5): 233236.
[8]赵威. 基于汽车线控转向系试验台的在环系统仿真[D]. 湖南大学, 2012.
[9]余卓平, 赵治国, 陈慧. 主动前轮转向对车辆操纵稳定性能的影响[J]. 中国机械工程, 2005, 16(7): 652657.
YU Zhuoping, ZHAO Zhiguo, CHEN Hui. Inflences of active front wheel steering on vehicle maneuver and stability performance[J]. China Mech Eng, 2005, 16(7): 652657.
[10]YUICHI O, YUTAKA O, TAKESHI G, et al. Design concept and advantages of steerbywire system[EB/OL]. (20080414)[20141010]. http://papers.sae.org/2008010493/.
(编辑武晓英)
