火箭拖拽布撒网飞行轨迹研究
2015-11-11韩峰陈翰陈放
韩峰,陈翰,陈放
(北京理工大学爆炸科学与技术国家重点实验室,北京100081)
火箭拖拽布撒网飞行轨迹研究
韩峰,陈翰,陈放
(北京理工大学爆炸科学与技术国家重点实验室,北京100081)
对布撒网系统纵向展开问题进行了研究。研究采用二维运动模型简化,运用多体系统动力学理论和集中质量法,建立了布撒网纵向展开过程的多刚体动力学模型。运用Kane方法建立系统动力学方程,运用数值方法分析和计算了该动力学方程,给出了布撒网纵向展开的动力学过程。得到了火箭和网上各点位置和受力的时程曲线,以及火箭和网的飞行轨迹。计算结果与模拟布撒网展开实验结果吻合。
兵器科学与技术;多体系统动力学;布撒网系统;Kane方法
0 引言
布撒网扫雷系统是目前世界上一种比较先进的扫雷系统,主要针对广阔、密集布设反坦克地雷的区域,它能够在雷区中快速地开辟出足够让装甲车辆通过的安全区域。
该系统的工作过程主要可以分为以下3个步骤:1)由牵引车辆将装载布撒网的弹药箱牵引到雷区前沿,升起弹药箱并调整小型火箭的发射角度;2)发射火箭,火箭拖曳着布撒网向前飞行展开,使布撒网张紧铺在目标雷区上;3)起爆布撒网上的子弹药,清除雷区中的地雷。由于该系统结构和工作过程的复杂性,对其进行实物实验研究需要消耗大量的资金和准备时间。并且,在对其结构和实验方案的设计过程中,也需要由预先计算分析提供指导和数据支持。因此,有必要对其飞行展开过程的动力学特性进行研究。
研究布撒网展开过程的动力学特性,首先要建立该系统的动力学模型。布撒网的结构复杂,其主体部分为一块由韧性带状材料十字交叉编制而成的长方形网。建立描述绳网运动的模型,是对该系统进行建模的过程中必须面对的难题。金栋平等对绳索系统动力学的建模方法、研究现状、工程应用等方面进行了细致的总结[1]。许多国内外学者运用集中质量的方法建立柔性绳索的多体系统动力学模型,对拖缆火箭[2]、海底拖缆[3-4]、空间绳网[5]、大垂度柔索[6]、飞机缆绳拾取系统[7]和飞艇系留系统[8-9]等绳索动力学问题进行了研究。集中质点方法的主要思想是将柔性绳索离散为有限个质点,质点间的绳段以无质量的刚性或弹性连杆代替,构成模拟绳索运动的多体系统模型。这种模型能够有效地模拟柔性绳索的大变形运动。
本文提出假设,使布撒网展开运动简化为二维运动问题。然后,运用集中质量方法对二维布撒网模型进行离散,建立布撒网系统的二维多体系统模型。然后利用Kane方法,建立该多体系统的动力学方程,并对该方程进行数值求解计算,分析计算结果。
1 多体系统动力学模型
1.1布撒网纵向展开问题的二维假设
布撒网从在箱体里的堆叠状态到完全展开主要经过两个方向的运动:一个是平行于火箭弹道平面的纵向运动;另一个是垂直于火箭弹道平面的横向运动。考虑到布撒网的结构和展开过程的复杂性,直接建立其三维模型有相当大的困难,需要对其结构和运动进行简化。布撒网的总长为72 m,展开后宽为3.3 m.为防止火箭尾焰影响布撒网,布撒网的前端通过牵拉钢索与牵拉火箭末端连接。布撒网末端通过回拉绳索与固定端连接,限制布撒网的飞行距离。在布撒网中,沿纵向等距分布了16根横向杆,横向杆对布撒网起到了横向刚性支撑的作用。横向杆按位置可以分为前杆、后杆和中间杆,分别位于方形网的前端、后端和中间部分。在展开过程中,横向杆会在内置驱动装置的作用下撑开,带动布撒网向横向展开。横向杆中间有一个柱铰,能自由弯转。布撒网在飞行过程中,在布撒网的自重作用下横向杆会自然弯成“V”字形并在120°时自锁。根据布撒网长宽比较大,且纵向展开的运动位移远大于横向展开的位移的特点,假设如下:
1)布撒网的结构左右对称,横向运动也左右对称,并且在横向杆的支撑作用下,横向位移较小,所以可以认为横向展开运动对纵向运动无影响;
2)在不考虑横向风,或者横向风很小的情况下,可以忽略布撒网的横向翻转问题;
3)子弹药纵向分布很密集,且质量很小,引起的质量突越不大,故可以近似认为布撒网沿纵向质量分布均匀;
4)布撒网系统的展开飞行速度最大不超过50 m/s,因此所受到的空气动力很小,可以忽略不计;
5)不考虑布撒网初始位置,假设布撒网从空间中一个点拉出。
本模型中并不认为布撒网没有发生横向运动,而是认为布撒网的横向运动对纵向展开运动没有影响,因此在计算布撒网纵向展开运动时不考虑其横向运动。经过假设布撒网在火箭弹道平面上的投影,是一根质量均匀的“柔性绳索”,可以通过集中质量方法建立其二维多体系统模型。
1.2布撒网的多体系统模型
为了描述和计算布撒网系统中柔性部分的动力学问题,将网划分为N段,每一段用刚性杆代替,相邻的两根刚性杆之间用光滑铰链连接,每一段杆的质量由其长度和网的纵向线密度决定。为了提高计算效率,可以将杆的质量平均地集中在杆的两个端点上[3],使问题再进一步简化。如图1所示,对于质点,其质量等于杆i质量的一半加上杆i-1质量的一半。对于网末端正处于被拉出过程中的杆的质量,根据杆已经拉出的长度计算。将质量集中到端点后,杆变成了无质量的二力杆,其内力,即相邻两个质点之间的相互作用力总是沿着杆长方向的。由于假设杆是刚性的,所以相邻两个质点之间的距离总是保持不变的。由此,网被简化为由N+1个质点组成的多体系统。此外,对于拉伸模量较大的牵拉钢索,也可以用同样方法进行建模。而回拉绳索采用的是拉伸模量较小的材料,在其作用过程中伸长较大,不能采用以上方法进行质点化,所以将回拉绳索简化为一个作用在布撒网末端的弹性力元。

图1 多体模型Fig.1 Multibody model
将火箭作为一个刚体,把网的第一个质点固定在火箭的末端,则火箭和N+1个质点构成了一个多体系统模型。可以用这个模型在外力作用下的运动,来模拟布撒网的纵向展开运动,进而建立方程来计算其运动过程和受力情况。
2 建立多体系统动力学方程
在火箭运动的平面内建立直角坐标系Oxy,x轴为水平轴,以布撒网纵向展开的方向为x轴正向,y轴方向为竖直向上。本文利用Kane方法[10],在直角坐标系Oxy中建立布撒网纵向展开二维模型的系统动力学方程,给出矩阵形式的表达式。其中,用下标0表示火箭质心,下标i表示第i个质点。
2.1广义坐标的选取
在二维运动中,自由刚体的自由度为3,自由质点的自由度为2,故整个系统需要用2N+5个广义坐标来描述。由于质点1固定在火箭上,并且存在着N个等距约束,故系统在约束条件下的自由度为N+3,需要求解的广义坐标为N+3个。
对于火箭,用其质心坐标(x0,y0),以及由x轴旋转到火箭轴线的角度θ0来描述。对于网的第一个质点,由于它固定在火箭末端并且在火箭轴线上,所以其坐标(x1,y1)可以由(x0,y0)、θ0以及火箭质心到末端的距离l0表示。对于2≤i≤N+1的情况,考虑到每两个相邻质点之间存在等距约束,质点i的坐标可以由质点i-1的坐标、杆i-1的长度si-1和x轴到杆i-1的转角θi-1来描述。假设杆k的初始长度为lk,则与等距约束相应的约束方程为sk=lk,所以在方程中将sk视为常量lk即可满足等距约束方程。令

则q就是需要计算的广义坐标阵。
2.2Kane系统动力学方程的建立
下面将利用Kane方程建立系统动力学方程。Kane方程的表达式为

式中:Fj为系统关于广义坐标qj的广义力;为关于广义坐标qj的广义惯性力。
其中,广义力的表达式为

系统关于广义坐标qj的广义惯性力为
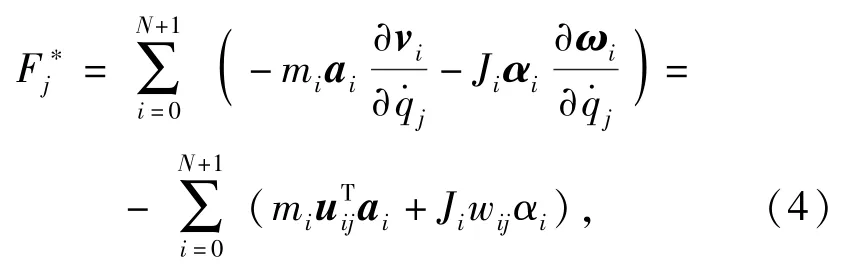
式中:mi为火箭和各质点的质量;ai为第i个质点(或者火箭质心)的加速度,ai为其分量矩阵;Ji为转动惯量;αi为第i个质点(或者火箭质心)的角加速度,αi为其z轴方向分量。
下面将进行火箭和各质点的偏速度、偏角速度、加速度和角加速度的推导。由广义坐标描述的火箭质心及各质点的位移ri、速度vi分量矩阵为
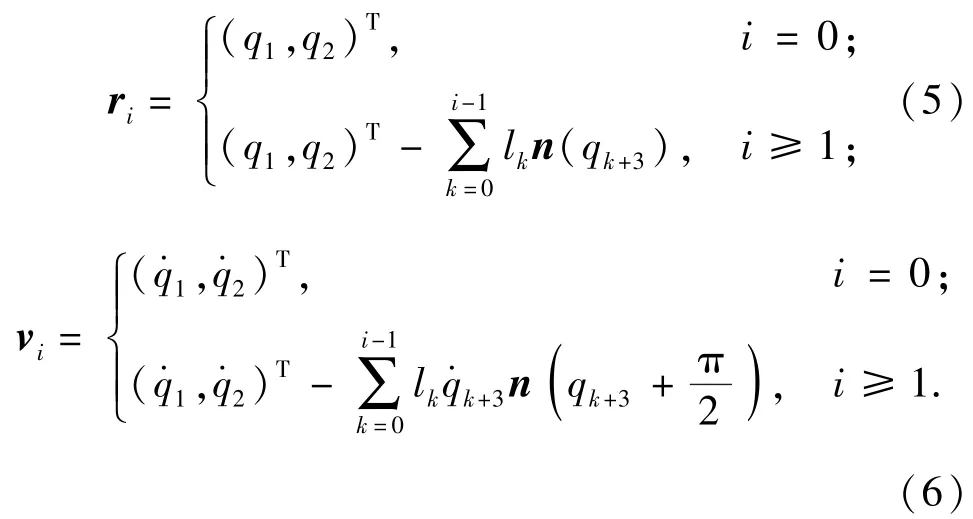
式中:n为便于书写,引入的2×1列矩阵,其表达式为

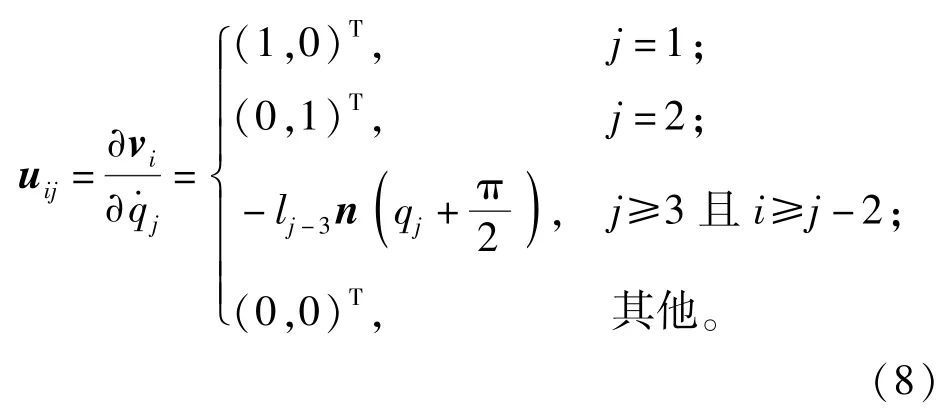
把(6)式对各广义坐标的一阶导数求偏导,得到偏速度表达式:

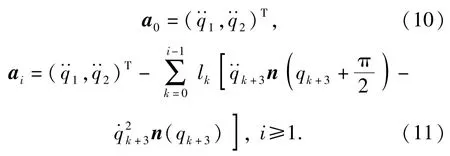
由(5)式再对时间求导,得到火箭质心及各质点的加速度表达式分别为


式中:Ci=[wi1wi2… wi(N+3)];Di=0.
将(11)式和Bi代入(3)式中,得
将(3)式和(14)式代入(2)式中,经整理并写成矩阵型式,得到该多体系统的动力学方程:

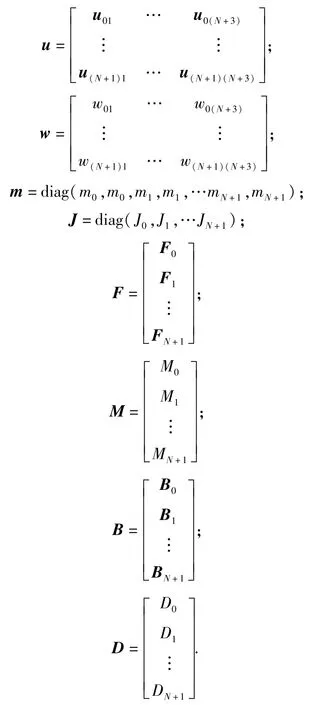
式中:
2.3系统外力分析计算
由模型的假设条件,分析可知系统受到的外力有火箭推力Fr、重力Gi、绳子末端拉出点的张力Te和限位装置的弹性力Tl.
由假设2,火箭推力始终沿着火箭的轴线,所以推力的方向与x轴的夹角就是广义坐标q3.假设火箭的工作推力大小为Ft(t),工作时间为tw,则火箭推力的表达式为

火箭和各质点所受到重力的表达式为

在网还未被完全拉出来之前,正在被拉出的网段张力作用在最后一个质点上,大小表达式[1]为

式中:ρ为网的纵向线密度;ve为网的末端,即最后一个质点的速率。
当网被完全拉出来后,为使网能够落在预定位置,并且保持张紧状态,在网的末端连着一个限位回拉装置,即网末端作用这一个弹性力,其拉力的大小可以表示为

式中:le为网末端质点到回拉装置固定端的距离;k为回拉装置的刚度系数;S0为回拉装置的原长。由于作用在火箭上的外力都经过火箭的质心,所以火箭质心处的合外力矩为0.对于质点,其合外力矩为0.
2.4约束内力的计算
由固定约束和等距约束产生的内力,不显含于用Kane方法建立的系统动力学方程中,故求解方程(15)式不能得到质点之间以及网与火箭之间的内力。想要得到约束内力的值,可以通过解除约束的方法来求解[7]。
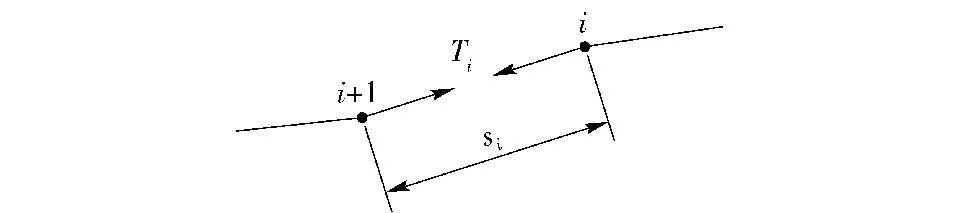
图2 约束力Fig.2 The constraint force
为了求解杆i的内力,即质点i+1与质点i之间的相互作用力(如图2所示),先解除质点之间的等距约束,以广义坐标si来代替原来的位置、速度、加速度表达式中的杆长li.然后,进行类似2.2节中的推导过程,得到系统关于广义坐标si的Kane方程,并将约束条件:

代入方程中。在该方程中将显含杆i的内力大小Ti.以Ti为正值时表示拉力,另外与si相关的偏角速度都为0,经过推导和整理,得
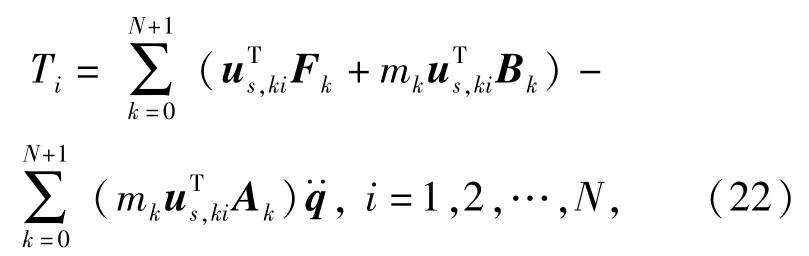
式中:us,ki为质点k(或者火箭)关于si的偏速度,其表达式为

其他变量的说明请参考2.2节.
同理,将质点1的固定约束解除,用广义坐标sx和sy描述质点1与火箭末端的相对位移,经过推导和整理,可以得到质点1与火箭之间的内力沿x轴和y轴的分量表达式为

式中:us,kx和us,ky分别为质点k(或者火箭)关于广义坐标sx和sy的偏速度,其表达式为
令T=[T0xT0yT1… TN]T,合并各内力表达式,得

式中:us的表达式为

其他各矩阵的说明请参考2.2节。
3 模拟布撒网展开实验
为了分析研究布撒网系统的展开规律,也为了验证布撒网二维展开计算模型的可靠性,进行了模拟布撒网的展开实验。模拟布撒网系统是在原型布撒网系统的基础上进行尺寸缩比和结构简化得到的,专门用于实验研究布撒网系统展开过程的实验系统。模拟布撒网系统采用了一款现有的小型火箭作为牵拉火箭,实验系统以该火箭的参数为基准进行缩比。除了尺寸以外,模拟布撒网的横向杆结构也进行了简化,去除了横向杆的展开机构和弯转机构,用一根直杆来代替原型中的横向杆。图3为模拟布撒网组装完成后的照片,图3中黑色钢杆即为简化的一根中间横向杆。模拟布撒网中横向杆共有7根,将布撒网划分为6块网。在每个横向带和纵向带交汇处,安装了一个螺栓,该螺栓用于模拟实际负载的重量。

图3 模拟布撒网结构Fig.3 Structure of net
模拟布撒网展开实验的现场布置如图4和图5所示,模拟布撒网就放置在布撒网箱中。其中,横向杆两端的突出部分搭在箱体顶部的滑槽中,布撒网的网体自然悬垂。牵拉火箭如图4所示,设置在布撒网箱前的发射架上,从地面发射。图4显示了发射前模拟布撒网和火箭发射架的相对位置以及布置情况。由于布撒网在悬挂时处于折叠状态,为防止在拉出过程中相邻两块网互相干扰,在两块网之间放置泡沫隔板(图4中布撒网箱前白色部分)。隔板采用轻质材料,与布撒网之间没有连接,当网被拉出后马上飞离,对布撒网的运动影响很小。在实验过程中,由一台高速摄影仪拍摄下模拟布撒网发射、展开和落地的全过程。图5中的标杆用于在分析数据时标定图片中的距离。
模拟布撒网在牵拉火箭初始射角为48°时,成功发射展开。在火箭飞行的初始阶段,火箭方向角有大幅度的上下摆动,经过几次大幅摆动后,摆幅明显减小。如图6所示,在模拟布撒网向前展开的过程中,布撒网面在离开布撒网箱后,呈波浪形上下起伏并向前运动。模拟布撒网落地后平整地铺开在地面上。本次实验成功地验证了布撒网系统展开技术的可行性,并获得了模拟布撒网展开过程的图像数据。

图4 布撒网箱体和发射架Fig.4 Net container and rocket laucher
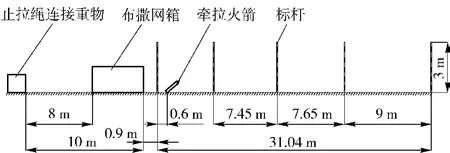
图5 实验现场布置示意图Fig.5 Experimental layout

图6 飞行展开过程Fig.6 Deploying process
4 数值计算结果及分析
本文运用Matlab,编制了数值求解常微分方程组(15)式并且同时根据(28)式求解布撒网纵向张力的计算程序。数值计算的方法采用了Adams四步法,利用经典4阶龙格-库塔法起步。随着数值积分过程的进行,网段数N将从0开始逐渐增加。程序在每个积分步结束后根据质点N+1与拉出点的距离le,判断N是否需要增加。当le大于划分的网段长度时,N将增加,并根据末端质点的位置和速度给出新质点的初始位置和速度。积分程序将从龙格-库塔法开始重新起步。
通过使用该数值计算程序,对在一定设计参数(见表1)下的布撒网展开飞行过程进行了仿真计算。通过数值计算,得到了广义坐标、广义速度和广义加速度在每一时刻的值。利用这些结果,根据(5)式、(6)式、(11)式、(28)式计算得到了火箭和网质点的位置、速度、加速度和布撒网纵向张力。
以下对比分析的实验数据来自模拟布撒网系统展开实验。其中,实际上钢索和布撒网之间还有1 m由纵向网带构成的过渡段,该段纵向线密度与钢索几乎一样,所以计算时将其归为钢索。通过利用高速摄影仪拍下模拟布撒网系统的全展开过程,获得等时间间隔的飞行展开过程图片。通过分析图片上牵拉火箭的位置像素,即可获得牵拉火箭的弹道位置数据,进一步使用差分方法可以得到火箭的速度。表1中的计算参数来源于模拟布撒网系统展开实验的实际测定参数,牵拉火箭和钢索的初始位置也按照实验的布置进行构造。

表1 计算参数Tab.1 Calculation parameters
图7为火箭质心飞行轨迹的计算值和实验值的对比。火箭着地位置的计算值为39.1 m,实验值为32.6 m,火箭落地点相差了6.5 m.火箭弹道顶点高度的计算值为5.2 m,实验值为4.7 m,相差0.5 m.从火箭的弹道曲线来看,计算结果的飞行高度和射程都比实验结果大,造成这种误差的主要原因是模型不计火箭和布撒网的空气动力。
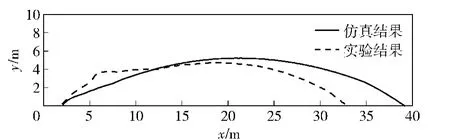
图7 火箭质心的飞行轨迹Fig.7 Rocket gravity center trajectory
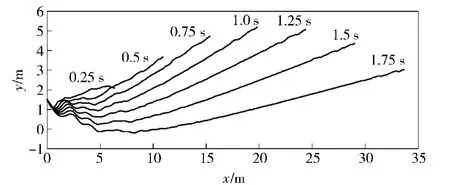
图8 计算得到的模拟布撒网姿态Fig.8 Calculated net shapes
图8为计算得到的模拟布撒网在几个时刻的飞行姿态。由于本计算模型中没有考虑与地面的碰撞,不能描述布撒网和火箭与地面碰撞的过程,有布撒网质点竖直位置小于0的情况。布撒网与地面接触已经是落地阶段,因此不计地面碰撞对布撒网的展开飞行过程没有影响。如图中所示计算得到的布撒网形状也呈一定的波浪形,但是摆动幅度比实验中观察到的幅度小。在实际的放置方式中,布撒网形状就是波浪形上下起伏的。而计算模型中忽略了布撒网的初始位置、姿态是导致计算中网面起伏幅度变小的原因。
图9和图10分别为火箭速度的水平分量v0x和竖直分量v0y的时程曲线对比图。由图9可以明显看出,在0.5 s后,火箭速度的水平分量的计算值比实验值要高。在图10中,火箭速度竖直分量计算值也微小的偏高,但总体趋势一致。火箭速度的计算误差也是造成火箭飞行高度和飞行距离计算误差的因素。一般的编织物在加载再卸载的过程中存在迟滞效应,即卸载时张力比加载时小,造成了织物在加载卸载的过程中存在能量损耗。在布撒网的动态展开的过程中,网带需要经历许多次加载卸载的过程,网带的变形过程会造成布撒网动能的损耗。而在本模型中,忽略了网带的轴向变形过程,所以布撒网系统的动能总体会偏高。
图11为火箭方向角θ0的时程曲线对比图,图中显示虽然计算值和实验值的数据相差较大,但是前期几个极值点的出现时间和总体趋势都有较好的一致性。
布撒网的总质量远大于火箭的质量,布撒网的运动将会对火箭运动起到很大的影响作用。图12所示为牵拉钢索对火箭拉力Tl的计算值时程曲线。如图12所示,在模拟布撒网的展开过程中,火箭受到的动态载荷在瞬间最大能达到火箭推力的5倍以上。布撒网对火箭的强动载荷,不仅对火箭的速度产生影响,而且使火箭的方向角产生较大的变化。而火箭方向角的变化会导致火箭推力方向的变化,进一步影响火箭水平速度和竖直速度。因此,火箭方位角的求解精度很大程度上影响了布撒网系统中其他广义坐标的求解精度。
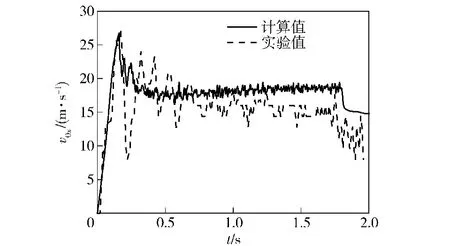
图9 火箭质心速度x轴分量Fig.9 x-component of rocket velocity
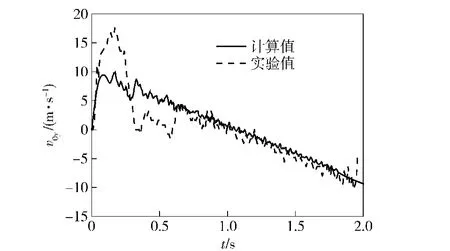
图10 火箭质心速度y轴分量Fig.10 y-component of velocity
如图11所示,在牵拉钢索的张力作用下,火箭方位角的变化很剧烈。如二维假设中提到的,火箭受到的空气动力很小,主要影响火箭方位角的是作用在火箭末端的拉力矩。该拉力矩的大小和方向都与图12所示的牵拉钢索拉力大小和图13所示的夹角有关。其中钢索拉力的方向角与牵拉钢索和布撒网的瞬时形状有关,因此布撒网的上下起伏运动会促使火箭方位角的摆动,而且布撒网起伏越剧烈,火箭方位角的摆动也会越剧烈。计算得到的火箭方位角摆动幅度比实验值小,是因为计算中的布撒网起伏运动幅度比实际小,从根源上来说是因为忽略了布撒网的初始位置、姿态。火箭方位角的变化存在着一定的规律。图13为火箭方位角θ0与钢索对火箭拉力方向的夹角θ1的计算值,图中显示布撒网对火箭拉力的作用结果,总是使火箭轴线与网前端方向趋于一致,趋于一致的过程中火箭方向角度会经历往复运动。图14分析了火箭受到的拉力矩情况,布撒网对火箭的拉力总是能使得火箭的轴线向拉力作用线方向偏转。
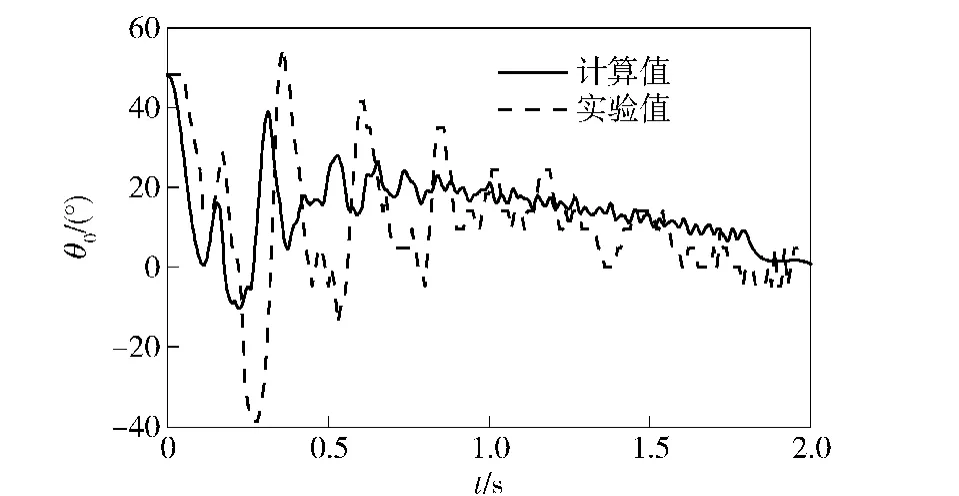
图11 火箭方向角Fig.11 Direction angle of rocket

图12 钢索对火箭的拉力Fig.12 Tension of wire
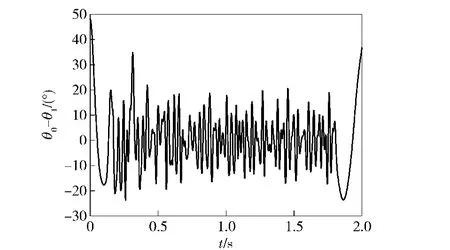
图13 火箭轴线和拉力方向的夹角Fig.13 Angle between rocket axis and tension direction
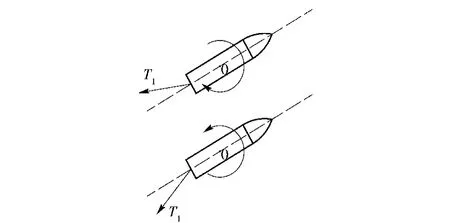
图14 布撒网拉力对火箭质心的力矩Fig.14 Net tension moment relevant to the rocket gravity center
5 结论
本文运用集中质量法建立了火箭拖曳布撒网展开运动过程的二维多体系统模型,运用Kane方法建立了系统动力学方程,并利用Matlab对该方程编制了数值求解程序。通过对计算结果的分析讨论,以及计算结果与实验结果的对比,得到了以下结论:
1)布撒网系统的二维多体系统模型能较好地模拟布撒网的展开运动过程,关于火箭弹道的各计算值与实验值具有一致性。
2)在展开过程中,火箭的末端受到较大的动载荷,动载荷的最大值可以达到火箭推力的6倍以上。
3)火箭的方位角在钢索拉力作用下经历剧烈往复运动,火箭轴向方向和拉力作用方向总是趋于一致。
如文中分析,布撒网系统的二维多体系统模型仍然有许多可以改进之处。考虑空气动力,考虑柔性体的轴向变形以及构造更加准确的初始条件,这些都是该模型可以改进的方向。
(
)
[1]金栋平,文浩,胡海岩.绳索系统的建模、动力学和控制[J].力学进展,2004,34(3):304-313. JIN Dong-ping,WEN Hao,HU Hai-yan.Modeling,dynamics and control of cable systems[J].Advances in Mechanics,2004,34(3):304-313.(in Chinese)
[2]吴小平,郑友祥,丘光申.拖缆火箭弹道计算研究[J].弹道学报,1995,7(1):41-49. WU Xiao-ping,ZHENG You-xiang,QIU Guang-shen.The study on ballistics calculation of line throwing rocket[J].Journal of Ballistics,1995,7(1):41-49.(in Chinese)
[3]Kamman J W,Huston R L.Multibody dynamics modeling of variable length cable systems[J].Multibody System Dynamics,2001,5(3):211-221.
[4]Banerjee A K,Do V N.Deployment control of a cable connecting a ship to an underwater vehicle[J].Applied Mathematics and Computation,1995,70(2/3):97-116.
[5]陈钦,杨乐平.空间绳网系统发射动力学问题研究[J].宇航学报,2009,30(5):1829-1833. CHEN Qin,YANG Le-ping.Research on casting dynamics of orbital net systems[J].Journal of Astronautics,2009,30(5):1829-1833.(in Chinese)
[6]李宾,李映辉,殷学纲.大垂度柔索的动力学建模与仿真[J].应用数学和力学,2000,21(6):641-646. LI Bin,LI Ying-hui,YIN Xue-gang.Dynamic modeling and simulation of flexible cable with large sag[J].Applied Mathematics and Mechanics,2000,21(6):641-646.(in Chinese)
[7]Williams P,Sgarioto D,Trivailo P.Optimal control of an aircrafttowed flexible cable system[J].Journal of Guidance,Control,and Dynamics,2006,29(2):401-410.
[8]郭良,唐乾刚,张青斌,等.飞艇系留试验中的绳索动力学研究[C]∥第九届全国振动理论及应用学术会议.杭州:中国力学学会.2007:725-732. GUO Liang,TANG Qian-gang,ZHANG Qing-bin,et al.Airship mooring ropes kinetics experiments[C]∥Ninth National Conference on Theory and Application of Vibration.Hangzhou:Chinese Society of Mechanics.2007:725-732.(in Chinese)
[9]唐乾刚,王振国.飞艇-绳索-子弹系留动力学研究[J].国防科技大学学报,2008,30(4):28-32. TANG Qian-gang,WANG Zhen-guo.A research of tether dynamics in airship-towed system[J].Journal of National University of Defense Technology,2008,30(4):28-32.(in Chinese)
[10]休斯敦R L,刘又午.多体系统动力学[M].天津:天津大学出版社,1987. Huston R L,LIU You-wu.Multibody dynamics[M].Tianjin:Tianjin University Press,1987.(in Chinese)
Research on the Trajectory of a Rocket-towed Net System
HAN Feng,CHEN Han,CHEN Fang
(State Key Laboratory of Explosion Science and Technology,Beijing Institute of Technology,Beijing 100081,China)
The lengthwise deployment of a net towed by a rocket is studied.The problem is simplified as two-dimensional motion,and a multi-rigid-body dynamic model is built.The dynamics equation of the multi-body system is built using Kane's method and is derived with numerical computation method.The calculated results which contain the trajectory and tension of the rocket-towed net system are in agreement with the simulation results.
ordnance science and technology;multiple body dynamics;rocket-towed net system;Kane method
TG156
A
1000-1093(2015)02-0263-09
10.3969/j.issn.1000-1093.2015.02.011
2014-07-03
总装备部预先研究项目(3020020121137)
韩峰(1965—),男,教授,博士生导师。E-mail:hhanfeng@bit.edu.cn;陈翰(1985—),男,博士研究生。E-mail:10902033@bit.edu.cn
