风机滑动偏航系统的在线监测系统数据分析
2015-11-09翟永杰等
翟永杰等


摘 要: 为了掌握滑动式偏航系统的运行特性,揭示风机偏航系统故障的原因,设计了一套基于LabVIEW的风机偏航数据采集系统,并对某风电厂的偏航系统进行长达3个月的在线监测,通过数据分析发现偏航系统运行中的一些问题,如:4个电机功率不一致,差值较大,并均存在波动;在偏航过程中,偏航系统的振动比较平缓,但存在突然增大的状况。根据分析,给出了偏航系统运行的建议,从而可以大幅减少偏航系统故障的出现,提高电厂效益。
关键词: 偏航系统; 在线监测; 数据分析; LabVIEW
中图分类号: TN964?34 文献标识码: A 文章编号: 1004?373X(2015)21?0123?04
Data analysis of on?line monitoring system for fan sliding yaw system
ZHAI Yongjie1, LI Bing1, CHANG Qicheng2
(1. North China Electric Power University, Baoding 071003, China; 2. Beijing University of Posts and Telecommunications, Beijing 100876, China)
Abstract: For mastering the operation characteristics of the sliding yaw system and looking for the fault reasons of the fan sliding yaw system, a set data acquisition system of fan yaw based on LabVIEW was designed, and the yaw system in a wind power plant was conducted with on?line monitoring for 3 months. Some problems in operation of the yaw system are discovered by data analysis, such as the different power, large power difference value and power fluctuation of the four motors, and in the yaw process, the vibration of the yaw system is gentle, and the situation of sudden increscent vibration is existed. According to the analysis, the operation suggestions of the yaw system are provided, which can reduce the fault occurrence of the yaw system significantly, and improve the efficiency of the power plant.
Keywords: yaw system; online monitoring; data analysis; LabVIEW
0 引 言
风力发电机通过偏航系统及时调整叶轮平面,使之与风向垂直,正面迎风,从而最大程度地利用风能,提高工作效率。偏航系统的正常运行与否直接影响了发电机组的功率以及风电场的效益,是风电机组最为重要的控制系统之一。偏航系统目前主要分为滑动偏航和滚动偏航。滚动偏航系统相比于滑动偏航系统,对风机轴承要求较高,运行维护成本较高,并有一定的维护难度。
某风电厂有50 kW·h以上的风机采用滑动轴承偏航系统,在经过几年的运行后,偏航系统故障问题非常突出,主要表现在偏航减速机损坏、驱动电机烧损、偏航齿折断、滑板断裂等,为了掌握滑动式偏航系统的运行特性,揭示风机偏航系统故障的原因,本文以V80机型的偏航系统作为研究对象,设计基于LabVIEW的风机偏航数据采集在线监测系统,获取风机在不同载荷、不同风速、不同出力、不同环境温度下的偏航系统受力情况,并对数据进行分析,从而针对性的设计维护和调整方案,减少偏航系统故障的产生,提高风电厂效益。
1 风机滑动偏航系统
1.1 偏航系统的组成与分类
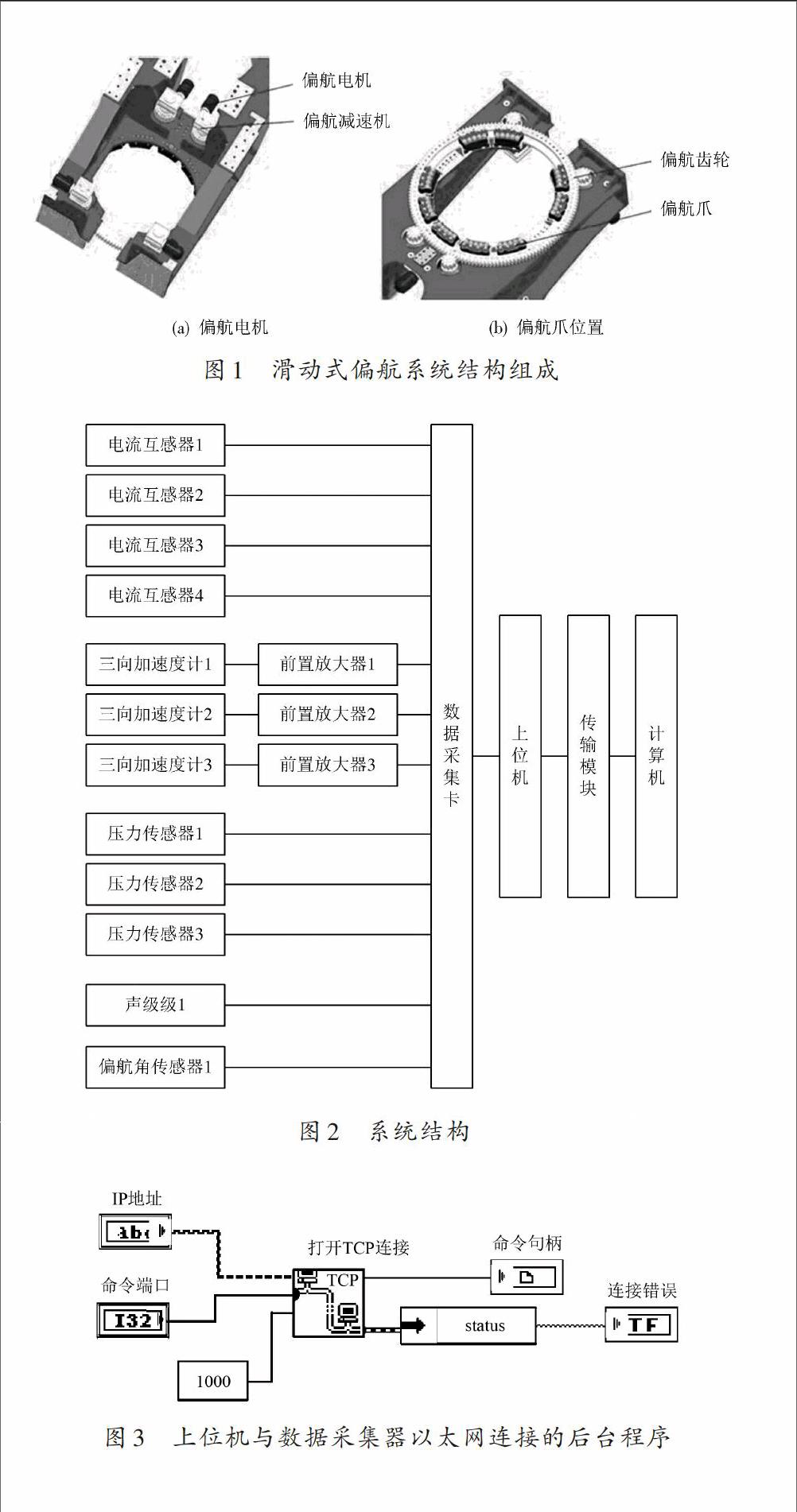
风力机是风力发电系统里进行能量转换的重要部分。风力机借风轮叶片吸收空气中的动能,捕获的动能经由风轮旋转转化为机械能。偏航系统也称为调向系统,是水平轴风力机不可缺少的部分[1]。风力发电机组的偏航系统主要分为滚动式偏航系统和滑动式偏航系统,其中滑动式偏航系统一般由偏航控制系统、偏航机构、扭缆保护装置三部分组成,而偏航机构由偏航电机、偏航减速机、偏航齿轮、偏航爪组成,如图1所示。
目前国内大部分机型均采用滚动轴承偏航系统,它有安装方便、偏航噪音小等优点,但风机用滚动轴承对轴承本身要求很高,制造困难,成本高、承载力较小、易损坏,造成后期维护成本较高。另外还需要安装刹车盘来实现锁紧,增加了装配难度,同时液压刹车系统还存在泄露隐患,增加了维护难度。与之相比,滑动系统有自身的优点,它制造相对简单、成本低、承载能力强,维护费用较低等,这种轴承在VESTAS机型和SUZLON风机中广泛采用。目前VESTAS公司在V52,V80,V90等机型中均采用嵌入式摩擦滑动轴承技术,利用工程塑料PEPT作为摩擦接触面,其有较强的承载和吸震能力。国内华锐等风机厂商也在这个领域进行一些探索。但针对滑动轴承运行数年后的故障处理和维护技术目前尚未见相关研究。
1.2 偏航系统的功能
偏航控制系统主要有3个功能和作用:
(1) 正常运行时自动对风。工作原理为:通过风向传感器将风向的变化传送到偏航电机控制回路的处理器中,经过判断决定偏航的方向和角度,最终达到对风目的。当对风结束以后,风传感器失去电信号,电机停止工作,偏航过程结束。
(2) 扭缆时自动解缆。当风机到达其规定的解缆角度时,控制系统对其进行自动解缆,此时风力发电机立刻刹车停机,然后启动偏航电机驱动机舱向相反方向旋转,使机舱处于电缆无缠绕状态。风力发电机设置了一个极值角度以防止出现故障时自动解缆未动作,在扭缆到达这个极值角度时,扭缆保护器动作,刹车停机,报扭缆故障,等待人工解缆。
(3) 失速保护时偏离风向。当有特大强风发生时,停机,释放叶尖阻尼板,桨距调到最大,偏航90°侧风,以保护风轮免受损坏[2]。
2 偏航系统特性在线监测系统设计
根据偏航系统分析的需要,监测系统主要实现偏航电机功率监测、偏航机构滑板压力监测、偏航爪振动监测、偏航噪声监测、偏航速率监测等功能。同时要求在线监测系统对风机偏航系统运行过程中的各参数的检测与保存,实时掌握偏航系统的运行状态,对潜在的故障进行预警,对保存的数据进行系统的分析和整理,总结受力、温度、风速对偏航系统的影响,从而为各种复杂情况下的稳定运行提供支持。
2.1 设计思路与原理
本文利用LabVIEW程序设计软件与数据采集器、传感器相结合,设计了一套风力发电机滑动式偏航系统状态在线监测系统,采集过程从偏航电机开始运转到偏航结束。主要思路是通过采集各偏航电机的电流、电压数值,利用三相电机功率计算各电机在偏航过程中的功率,利用压力传感器检测压力的变化,系统结构框图如图2所示。
2.2 硬件及软件设计
根据检测的要求,需要对偏航过程中的各项数据进行检测和保存。经过对比,选定的硬件包括:工控一体机、交流电流互感器、交流电压互感器、三向加速度传感器、多路数据采集器。
软件系统设计主要采用LabVIEW程序设计软件来实现上位机监控程序的设计。并进行模块化程序设计,实现数据采集、监测与分析等功能,其中后台数据采集及上传软件如图3所示,数据自动保存软件如图4所示。
LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种图形化的编程语言,其使用图形化的符号来创建程序(通过连线把函数节点连接起来,数据就是在这些连线上流动的)[3],被工业界、学术界和研究实验室广泛地所接受,视为一个标准的数据采集和仪器控制软件。
3 数据分析与建议
3.1 数据分析
通过风机偏航在线监测系统,在现场进行了实际调试和应用,该系统持续稳定运行3个多月,掌握了偏航系统中4个偏航电机功率和偏航爪处的振动情况,得到了大量的现场监测数据,通过对数据的分析,发现偏航系统运行中存在以下问题(由于现场采集数据量较大,故选择具有代表性的数据进行说明):
(1) 4个偏航电机在偏航过程中,功率并不一致,最大差值接近18%,偏航时3号偏航电机是4个偏航电机出力最大的电机的次数较多,这与风机偏航过程中偏航齿圈的摩擦状态有关,说明3号偏航电机处偏航爪摩擦较大。如图5所示(2014年10月24日21时34分25秒的电机功率监测图)。
(2) 偏航过程中,各偏航电机的功率存在波动,4个偏航电机出现波峰和波谷的时间是一致的。如图5所示。
(3) 偏航过程中,偏航电机功率都是逐步增加到最大值,这与风机载荷计算时,偏航开始时,偏航力矩增大相一致,如图5,图6所示。
(4) 在大部分偏航过程中,偏航电机功率都小于偏航电机的额定功率2.2 kW,为图中水平黑线。但是存在个别偏航过程偏航电机瞬时过载现象,如图6所示,4号偏航电机瞬时功率超过额定功率。
(5) 在偏航过程中,偏航系统振动较平缓,但是存在某些时刻振动突然增大的状况,如图7所示。
(6) 在偏航系统启停时,偏航系统振动较大,其中[y]方向最明显,如图7所示。
(7) 在偏航过程中,偏航系统各个方向的振动幅度并不完全一致,同时振动稳定时,[y]方向的幅值低于0,这是由于重力加速度的原因,如图8所示。
(8) 在偏航过程中,[x]方向的振动几乎不受偏航速度、偏航角度及湍流强度的影响,[y,z]方向的振动幅值在湍流条件下会产生较大的波动,如图8所示。
3.2 运行规律与建议
针对监测数据所反映出的滑动偏航系统存在的问题,提出了以下几点建议:
(1) 应对偏航电机增加过载保护装置。在偏航过程中,偏航系统承受了巨大的偏航力矩,且由于采用滑动偏航轴承,偏航系统也会承受较大的偏航摩擦阻尼,偏航轴承摩擦状态复杂,很难保证各偏航爪摩擦状态一致,因此4个偏航电机在偏航中出力存在不一致的现象。为了减少偏航电机及减速机严重故障的发生,应为偏航电机或偏航减速机增加扭矩保护装置,限制偏航系统的超载,对超过安全载荷的偏航载荷,进行保护,保证系统运行的安全可靠。
(2) 加强对偏航轴承状态的维护。定期对偏航齿面清洁情况、偏航爪紧固力矩、偏航爪间隙进行检查与维护,保证齿面清洁、偏航爪紧固力矩在额定值范围内,偏航爪间隙在限值内,可以减少偏航系统摩擦阻尼,保证偏航摩擦阻尼的均匀性,提高偏航系统运行的可靠性。
(3) 对偏航电机的启动方式进行改进。从启动过程功率曲线来看,偏航电机在全压起动过程中存在起动冲击电流,起动过程电流和转矩的震荡剧烈,同时由于起动应力较大,加剧机械结构磨损,使负载设备的使用寿命降低。在停机时,偏航电机突然失去转矩,靠系统的摩擦转矩克服系统的惯性滑行停车,会对电机造成较大的机械故障。因此可采用软启动方式进行偏航电机起动。
(4) 风力发电机的偏航轴承载荷与风力机所在的地理位置有着很大的关系,在面对山谷,高坡地方时,应合理调整上吹角度,使风轮平面与來流方向尽量保持垂直方向,可以减小风力发电机偏航系统的载荷,增加其寿命。
4 结 论
本文通过基于LabVIEW的偏航数据采集系统对偏航系统中的4个电机参数进行在线监测,全面了解偏航系统的工作过程,准确掌握了不同环境下的运行规律。主要采集的数据为电机的加速度、功率等多种参数。通过对数据分析发现,系统存在偏航电机功率不一致、运行过程中功率不稳定等问题,建议在以后的运行过程中,增加对偏航电机过载保护装置,改进偏航电机的启动方式,加强对偏航轴承的维护,从而减少故障发生的可能,提高风力发电厂经济效益。
参考文献
[1] 秦川,王志中,马明辉,等.基于虚拟仪器的肌电信号采集系统[J].医疗卫生装备,2003,24(11):3?4.
[2] 何亚农,王艾伦,赵跃龙,等.LabVIEW虚拟仪器技术在机械基础实验教学中的应用研究[J].装备制造技术,2007(10):78?79.
[3] 舒展,任成祖.基于纳米进给铸铁基砂轮电火花精密整形研究[J].制造技术与机床,2006(6):53?56.
[4] 雷刚,许勇.基于LabVIEW的发动机数据采集系统[J].现代电子技术,2012,35(14):140?142.
[5] 王子瑞,孙敬敬,王林,等.基于LabVIEW虚拟仪器的双通道信号采集与分析系统设计[J].机电工程技术,2011,40(8):42?45.
[6] 谢大刚,侯冬云,喻菁,等.基于虚拟仪器技术的电网监控系统的设计[J].装备环境工程,2008(5):68?70.
[7] 石建国.万能式断路器电流脱扣特性的自动检测[J].江苏电器,2005(2):33?35.
[8] 张瑞香,刘冲,覃承彬,等.基于LabVIEW的Agilent 33220A控制系统[J].装备制造技术,2006(3):63?65.
[9] 谢金华.软起动器在水处理中的应用及选型[J].机电工程技术,2006,35(6):61?62.
[10] 王俣.气象辐射仪检定用多维自动检测平台研究[D].长春:长春理工大学,2011.
