突防航迹规划中雷达探测盲区的快速生成算法
2015-11-09钟文武等
钟文武等

摘 要: 利用雷达探测盲区进行低空突防,能有效提高飞机生存概率,是飞机突防作战广泛采用的进攻手段。研究了地球曲率盲区和地形遮蔽盲区模型,提出了一种结合DEM的雷达探测盲区快速生成算法,并在此基础上采用A*算法将生成的雷达探测盲区用于飞机突防航迹规划。仿真结果表明了算法的快速有效,能直接应用于突防飞机航迹规划。
关键词: 低空突防; 雷达盲区; 航迹规划; DEM
中图分类号: TN95?34; TP301.6 文献标识码: A 文章编号: 1004?373X(2015)21?0042?04
Fast generating algorithm of radar detection blind region in
defense penetration route planning
ZHONG Wenwu1, ZHOU Xinli2, JIN Huiqin2, ZHANG Ye1
(1. Graduate Students′ Brigade, Naval Aeronautical Engineering Institute, Yantai 264001, China;
2. Department of Electronics and Information Engineering, Naval Aeronautical Engineering Institute, Yantai 264001, China)
Abstract: Low altitude defense penetration utilizing radar detection blind region can improve the survival probability of aircrafts effectively, and is an offensive means adopted widely in aircrafts defense penetration combat. The blind region models of earth curvature and terrain masking are analyzed. A fast generating algorithm of radar detection blind region is proposed, which is combined with DEM. Based on this, the generated radar detection blind region is applied to the route planning of aircrafts defense penetration by adopting A* algorithm. The simulation results show that the algorithm is quick and effective, and can be used in defense penetration route planning of aircrafts.
Keywords: low altitude defense penetration; radar blind region; route planning; DEM
0 引 言
现代飞机突防作战中,各种高性能的新型防空武器的出现,使得突防飞机受到的威胁更加复杂化和多元化,而其中由敌方雷达、地空导弹和火炮阵地组成的防空火力系统是突防飞机面临的首要威胁。利用雷达探测盲区,采用地形跟踪/地形回避/威胁回避的低空突防策略,能有效提高飞机生存概率,是飞机突防作战广泛采用的进攻手段。因此,对雷达探测盲区进行研究是突防任务规划中威胁评估和航迹规划的重要内容。
雷达探测盲区主要由地球曲率盲区、地杂波盲区和地形遮蔽盲区构成。其中,地球曲率盲区和地形遮蔽盲区相对稳定并能精确计算,而地杂波盲区由众多模糊、动态的因素共同作用形成,需要在线实时计算。因此利用地球曲率盲区和地形遮蔽盲区进行突防航迹规划是稳定可靠的。本文研究了地球曲率盲区和地形遮蔽盲区模型,提出了一种结合DEM的雷达探测盲区快速生成方法,并利用A*算法将生成的雷达探测盲区用于飞机突防航迹规划。
1 雷达探测盲区模型
1.1 地球曲率盲区模型
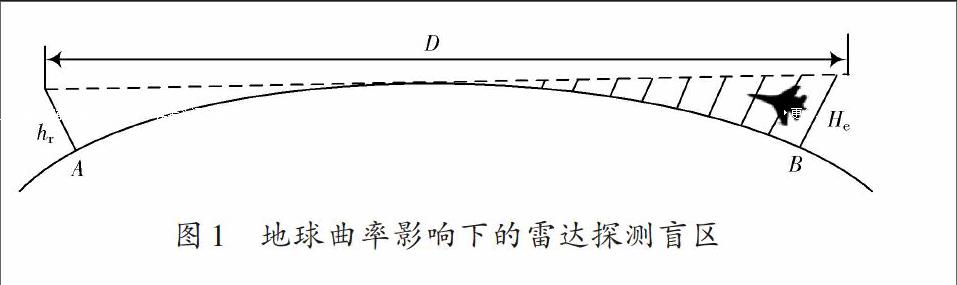
大多数雷达工作频率在1 GHz以上,电磁波沿直线传播,而地球存在一定曲率,使得在雷达电波视线之下形成一块探测盲区,如图1中阴影部分所示。因此,突防飞机可以利用地球曲率盲区进行低空突防。
地球曲率盲区高度主要与雷达架设的高度和雷达与目标的直线距离有关。设雷达所在位置为点[A],雷达距离地面的高度为[hr,]目标点位于点[B,]其安全盲区高度为[He,]雷达与目标的直线距离(雷达直视距离)为[D,]且已知地球半径[Re,]由几何关系可以得到如下关系式:
1.2 地形遮蔽盲区模型
地形对雷达探测边界的影响体现在高山、丘陵等地形对电磁波的遮挡。地形遮蔽盲区主要与雷达天线的高度和雷达探测范围内地形的起伏有关,因此地形遮蔽盲区是一种稳定的、可精确判断和计算的雷达威胁盲区,并且对敌防空火力系统和电子干扰都具有一定的遮蔽作用,是突防飞机实现低空突防的重要安全盲区。现有文献中对地形盲区的计算一般都采用基于极坐标辅助网格的雷达通视性算法[1?2],本文对这些算法加以改进,采用DEM与雷达射线方程相结合的方法精确描述雷达地形遮蔽盲区。
DEM是在二维空间上对三维地形表面的描述,即它首先对研究区域在二维平面上进行网格划分(划分的大小取决于应用目的),形成覆盖整个区域的网格空间结构;然后利用分布在网格点周围的地形采样点内插计算网格点的高程值;最后按一定格式输出,形成该区域的DEM[3]。下面详细说明基于DEM的雷达地形遮蔽盲区的算法步骤:
(1) 以雷达为中心建立极坐标辅助网格。如图2所示为雷达探测区域的DEM网格,其中一个网格长度代表实际距离[L。]以雷达所在位置为圆心,雷达最大作用距离[R]为半径作一个大圆;在大圆内再作[N]个同心圆[(N=int(RL)),]其半径为[kL(k=1,2,…,N)];以雷达所在位置为中心,向外均匀辐射出[M]条射线,相邻射线之间的夹角[Δθ=2πM;]射线与同心圆相交于点[Am,n(m=1,2,…,M;n=1,2,…,N);]
(2) 计算极坐标网格点的高程值。极坐标网格节点的高程可通过周围相邻四个规则网格节点插值得到。为了减少计算量且能得到相对连续光滑的插值表面,本文采用双线性拟合的方法对高程进行插值计算。设待插值节点[P]相邻四个网格点的高程分别为[h1,][h2,][h3]和[h4,]则该节点的高程插值为:
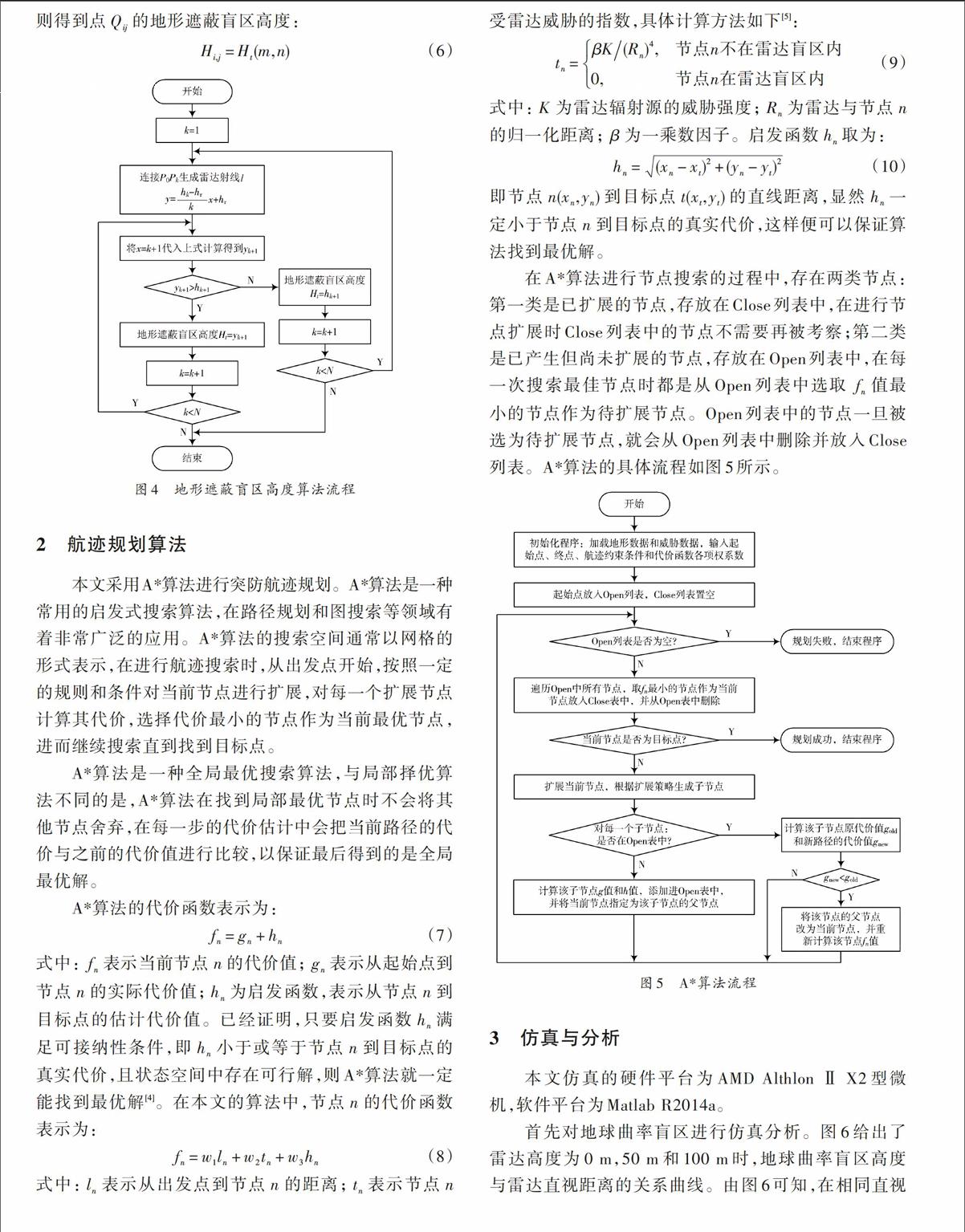
2 航迹规划算法
本文采用A*算法进行突防航迹规划。A*算法是一种常用的启发式搜索算法,在路径规划和图搜索等领域有着非常广泛的应用。A*算法的搜索空间通常以网格的形式表示,在进行航迹搜索时,从出发点开始,按照一定的规则和条件对当前节点进行扩展,对每一个扩展节点计算其代价,选择代价最小的节点作为当前最优节点,进而继续搜索直到找到目标点。
3 仿真与分析
本文仿真的硬件平台为AMD Althlon Ⅱ X2型微机,软件平台为Matlab R2014a。
首先对地球曲率盲区进行仿真分析。图6给出了雷达高度为0 m,50 m和100 m时,地球曲率盲区高度与雷达直视距离的关系曲线。由图6可知,在相同直视距离下,随着雷达高度的增加,地球曲率盲区高度减小,因此雷达一般会选择部署在地势比较高的位置,以降低盲区高度。而且从图中可以看出,在雷达高度为100 m时,100 km处的盲区高度仅为300 m左右,这对突防飞机低空飞行能力要求较高,因此利用地球曲率盲区实施突防只能在距离雷达较远的地区进行。
最后对地球曲率盲区和地形遮蔽盲区两类盲区进行综合,取两者的最大值作为综合盲区高度,雷达高度为400 m,其他参数不变。在此基础上,采用A*算法对飞机突防进行航迹规划,起始点坐标为(100 km,400 km),目标点坐标为(450 km,100 km)。仿真结果如图9所示。由图9可以看出,规划出的航迹利用雷达盲区有效规避了雷达的探测区域且以较短路程到达目标点,在距离雷达中心较远时,突防飞机主要利用地球曲率盲区进行突防,而在距离雷达中心较近时,突防飞机利用地形遮蔽盲区快速穿越防区到达目的地,避免了为躲避雷达探测而选择较长的飞行航线,减小了航迹代价和威胁代价,提高了突防飞机的生存率。
4 结 语
本文在对地球曲率盲区和地形遮蔽盲区进行分析和建模的基础上,提出了一种地形遮蔽盲区的快速生成算法,并将两类雷达盲区进行综合,最后采用A*算法对生成的雷达盲区进行突防航迹规划。仿真结果表明,本文提出的雷达盲区生成算法快速有效,且能直接应用于突防航迹规划。
参考文献
[1] 黄俊,于雷,李战武,等.对地任务规划系统威胁空间综合量化建模与仿真[J].系统仿真学报,2010,22(4):1033?1036.
[2] 吴强,金长江.一种快速构造雷达地形遮蔽盲区的方法[J].北京航空航天大学学报,2002,28(6):633?635.
[3] 李晓波,李雪光,陶文,等.DEM数据在雷达地杂波仿真中的应用[J].装备指挥技术学院学报,2010,21(2):69?73.
[4] 郑昌文,严平,丁明跃,等.飞行器航迹规划[M].北京:国防工业出版社,2008.
[5] 张欣景,胡训强,谢国新,等.航路规划中数字地图综合处理技术[J].火力指挥与控制,2012,37(1):95?98.
[6] 郝震,张健,朱凡,等.雷达威胁环境下的无人机三维航迹规划[J].飞行力学,2010,28(1):47?51.
[7] 陈侠,鹿振宇,徐光延.基于概率地图的低空突防威胁空间量化算法[J].火力指挥与控制,2014,39(5):31?35.
[8] NANNICINI G, DELLING D, LIBERTI L, et al. Bidirectional A* search for time?dependent fast paths [C]// Proceedings of 2008 the 7th Workshop on Experimental Algorithms. [S.l.]: Springer Verlag, 2008: 334?346.
