轮椅式机器人室内自主定位系统研究
2015-11-07佛山顺德新大通工艺电器有限公司孔庆莹
佛山顺德新大通工艺电器有限公司 孔庆莹
广东工业大学自动化学院 王 波
广东必达电器有限公司 李青云
广东工业大学自动化学院 夏 雪
轮椅式机器人室内自主定位系统研究
佛山顺德新大通工艺电器有限公司 孔庆莹
广东工业大学自动化学院 王 波
广东必达电器有限公司 李青云
广东工业大学自动化学院 夏 雪
中国正在快速进入老龄化社会,越来越多的长者需要专人看护。然而人工护理的成本日益高涨,使得许多家庭难以承担相关费用。本文提出一种适用于轮椅式护理机器人上的室内自主定位系统。测试结果表明,基于超声波传感器全局定位和惯性导航的方法,可以实现较好的室内定位,并根据上位机的路径规划实现室内的自主巡航。
护理机器人;路径规划;自主巡航
中国正快速步入老龄化社会,越来越多的长者需要专人护理。随着人工护理费用的日益高涨,许多家庭己经难以承担相关的费用。因此,市场对自动化护理产品的需求不断增长,助老助残机器人的发展己成为社会进一步发展的迫切需求[1]。目前,市场上己经有一些护理床以及护理床可变轮椅方面的报道,但要发展可室内自主定位、自主巡航的智能机器人在当前及可预见的将来仍有一定的困难[2]。
为此,本文提出一种适用于轮椅式护理机器人的、低成本的定位系统。该系统采用超声波技术[3,4]进行机器人的全局定位,并结合码盘、电子罗盘等进行机器人的局部定位。通过全局定位修正局部定位精度,通过局部实时定位有效解决了超声波传感器的多径干扰和死区等问题,二者相互结合。
1 定位系统构建分析
室内定位的方法可以采用RFID、蓝牙、WIFI等技术实现[5],但目前这些方法难以实现dm级精度定位。对于激光测距技术[6],虽可得到精准的测距数据,但价格昂贵,而且激光照射对眼睛存在着一定的伤害[7],因而不宜在护理病房或小儿活动区使用。为此,本文的采用基于超声波传感器、码盘和电子罗盘等多种器件结合的定位方案。
轮椅式护理机器人采用四轮后差动方式驱动,其最鲜明的特点是可以在“床”和“椅”之间变形切换。也就是说,这种机器人在病人需要睡眠时,可以变形为护理床;需要自主定位或移动时,可以变形为轮椅。该机器人可供自理能力低下甚至肌体己严重退化直至瘫痪的长者通过语音、触摸屏、摇杆甚至手机异地控制等方式调用运行模式,使得更多的长者居家或在养老院更有尊严地安享晚年,很大程度上减少了专人看护、减轻了家庭负担。同时,机器人还充分利用了居室内己有安全设施,包括阳台、卫生间等空间,实现室内定位、路径规划、自主巡航以及避障绕障,从而顺利抵达目的地。
1.1 基于超声波传感器的室内定位
目前的超声波传感测距精度己达厘米级别[8],并具备一定的长距测距能力,因此选择将其用于室内定位是比较适当的。
本文采用水平沿边参考测量方案,在护理机器人四周安装12个超声波传感器。机器人周围每隔30°的射出角安装一个超声波传感器,实现四周360°全方位的均匀覆盖。系统在定位过程中,超声波传感器对参考物(如墙壁等)的有效扫描,进而确保机器人在行进中实时坐标的准确性。但事实上,护理现场环境并非都十分理想,如家具的摆放,临时物体的摆放,人员的走动等因素的存在,必然会对超声波传感器的定位带来干扰,从而影响定位系统的准确性及路径规划的合理性。
超声波传感器全局扫描定位,在空间上没有可靠平面坐标X、Y二元素扫描区间或仅一个元素可扫描的区间,我们将其定义为 “盲”区或“半盲”区。因此,仅仅用超声波传感器定位的方案是存在“盲”区或“半盲”区缺陷的。因此,我们需要解决盲区问题。
1.2 室内定位盲区问题的解决
上述的定位方法,称为全局定位系统,但存在着“半盲”区或“盲”区的问题。为解决这种全局扫描定位的盲区问题,我们引进码盘惯性导航系统,称为局部定位系统。
码盘局部定位系统属于一种惯性导航系统,这种惯性寻迹移动不适宜过长距离或过多不规则的拐弯,否则容易导致位置累积偏差过大时,使得定位系统陷入“迷航”的困境。但是,惯性导航系统在短距离的行进是可以满足定位精度要求的。当机器人进入“盲”区或“半盲”区时,即可认为机器人失去了全局导航功能。此时,在盲区中行进的机器人,可以用惯性导航系统协助实现系统的实时定位和导航。当机器人驶离盲区范围时,系统又恢复了全局导航。因此,全局定位和局部定位相互配合,实质就是实现全局扫描定位与码盘局部定位相融合的一种全新定位系统。
2 移动路径规划
规划路径有如上述生活需求之外,还需考虑机器人的自身机械运行性能条件、场地条件、停靠交互安全距离预留等的因素。按照相关标准规定,在为护理机器人作移动路径规划时,要确保如下条件:
(1)交互安全距离:通常两人相处能接触交互距离不少于30cm~50cm。
(2)交互角度预置正向偏差:±5°以内较适当。
2.1 行进中定位及安全移动
假定室内布局如图1所示:
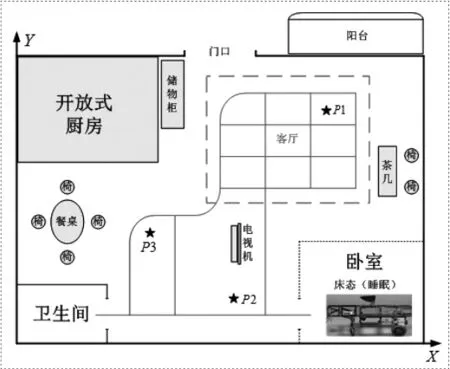
图1 室内布局图
图1中,把房子分为X、Y两个方向。途中虚线框内表示“客厅”,设有多条主干道网状通道布局。同时,“客厅”也视为全局定位区,因为在此区域内周边的环境可以满足超声波全局扫描。当机器人驶入“客厅”,则可认为机器人进入全局扫描范围;当机器人驶离“客厅”,则机器人进入“盲区”和“半盲区”范围。如图中,P1处由于超声波可以扫描到X、Y正负四个方向的距离,并有算法计算出当前坐标,故可作为全局定位范围;P2由于Y轴正方向处放有“电视机”,故无法四个方向同时扫描,但此时的X轴正方向和Y轴负方向是可以扫描的,因此可认为是“半盲区”;P3由于仅有Y轴负方向可以扫描,其余方向均无有效数据,故可认为是“盲区”。
在没有扫描边缘或参考物覆盖的“盲区”区域范围,规划出来的干道只能依靠惯性导航来行走。但惯性导航位移的累积偏差会逐步增大,甚至超出允许偏差上限,因此需要适当返回全局定位区或安置特别参考物位作辅助定位,进而消除惯性导航的累积误差。也称这种重新定位消除偏差的互补融合特别结构为“超声扫描与码盘定位融合系统”。
因此,在室内布局时应重视全局定位条件区的分布设计。如果受条件约束确实无太多全局定位条件的情况下,可人工小范围、多个点地设置辅助标识物,强化扫描“盲区”的改良。如设置低成本的小方柜、小花槽座、饰灯座均极低成本且美观实用兼改良完善了原“盲区”的超声定位扫描条件。
2.2 实现精确位移的措施
要在室内无障通道实现精确位移,只须要保障机器人自身定位坐标正确便能实现。这就是规划出来的预设无障碍干道在机械人行走路径存有了这份场景地图。这包括无障碍干道预留了机器人精确位移允差条件相对的预留合理道路空间,这类似推小车穿过窄小门框,必须预有空隙才适合车通行,这是一致的原则。
另外,在测取机器人的码盘位移精确度后,在机器人允许进入“盲区”干道前,应做超声扫描校正码盘定位一次(或以上)。或在码盘位移精度累积超偏上限前的位移里程内,自动安排适当地返回就近全局扫描区校正位移码盘参数。这在运行软件上可予以处理。加上机器人同样设置了精确防碰传感器,测取中途切入障碍或干道临入物料,机器人均可控制自动缓行并在几个厘米内刹车,这是安全自主运行的措施保险。
轮椅式护理机器人的四轮构造,前轮由一对万向轮组成,后轮由一对差动式驱动轮组成,动力由后轮提供。由于机器人启动时两个万向轮初始方向不同,使得两个万向轮与地面之间的摩擦力不同,进而导致后轮差动式驱动需要不断改变两轮的驱动力来抵消两个万向轮摩擦力之间的偏差。因此,机器人启动过程中,实际的行进路线存在着轻微的偏摆干涉。
然而,当机器人行进小段距离,两个万向轮方向调整一致,这种干涉是不存在的,因此这种干涉只存在于启动过程中。如图2所示。
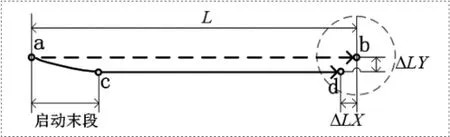
图2 车身偏摆干涉示意图
图2中,虚线表示机器人由a点出发行走至b点理论路径,而实线表示机器人启动完毕后先到c点,最终达到d点,△LX和△LY表示X、Y坐标的偏差值。因此,机器人在启动到启动末段之间(即a点到c点),会因万向轮初始方向、路况等因素的干涉,使得机器人实际行走路线与理论行走路线存在一定的微小偏差。由理论推导并实际测试,这种干涉的导致的偏差幅度也仅在10cm以内。在此,本文提出了两种消除上述干涉的方法。
方法1:
将前万向轮改造为可受控摆角的前双轮,令其与动力差动轮行驶控制方向一致,由软件支持其整车初段启动方向一致性即能消除干涉。
方法2:
这种干涉在导航时X、Y坐标会出现△LX和△LY的偏差。在机器人行至启动末段c点时,可由上位机再次启动全局定位,此时:
(1)如果此时机器人仍在全局扫描范围内,超声波全局定位可以再作一次自我坐标校正,消除△LX和△LY偏差。偏差消除后,机器人根据新的坐标行至终点b。
(2)若此时机器人不在全局定位范围内,则可根据机器人由c点终点b过程中,实时搜索全局定位点。行进过程中,如果机器人进入全局定位范围,上位机再次启动全局定位,并作二次修正,消除机器人启动过程带来的偏差△LX和△LY。
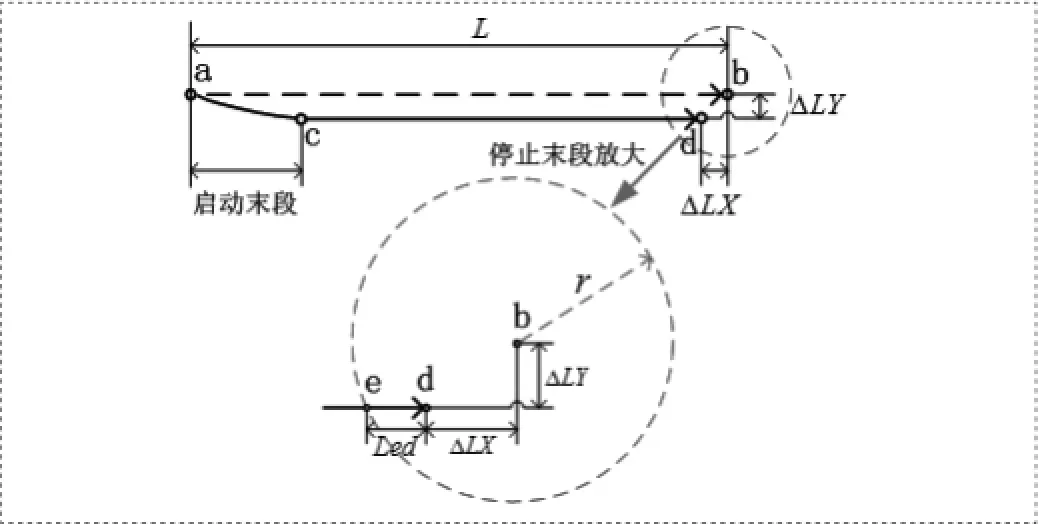
图3 终点处定位修正示意图
上述的二次修正若放在机器人逼近终点b时执行,应更为得当,此种方法为终点处定位修正。因为机器人由c点终点b过程中,若机器人处于非全局定位范围,此时靠惯性导航制导,会存在一定量的累积误差。如图3所示。
如图3所示,假设:上位机设定机器人位移为L。由于超声扫描获得测距参数需耗时80ms(现选超声产品特性决定),因此当机器人逼近终点d时,在d点之前的位置(即e点)启动二次定位修正,以保证修正定位后机器人在未停止的情况下顺滑切入b点。当机器人抵达e点,即进入半径为r圆区域,此时:

在e点处全局扫描获得坐标及罗盘方向角参数,并与上位机电子地图中设定目的点b坐标作比较,若此时坐标偏差大于设定值,需在未段重启二次定位,并根据定位结果规划路径切入b点,即d-b轨迹。
假设,当机器人抵达e点开始启动全局定位时,速度
根据切入弧度半径的经验值,在后边轮沿轴向计至圆心半径取值大于0.85m,机械扭矩较充裕的选择特点,d至b,即近似Lad约应大于0.85m。经实际测量,、偏差实际上是极有限的。因此,若配置动力充足,可忽略半径取值考虑,即可酌量缩减包括b驻点圆半径r可尽量取小值。
3 实验与结果分析
在实际场地中,分别对护理机器人直线行走和转弯两种动作的精度进行测试,结果见表1和表2。
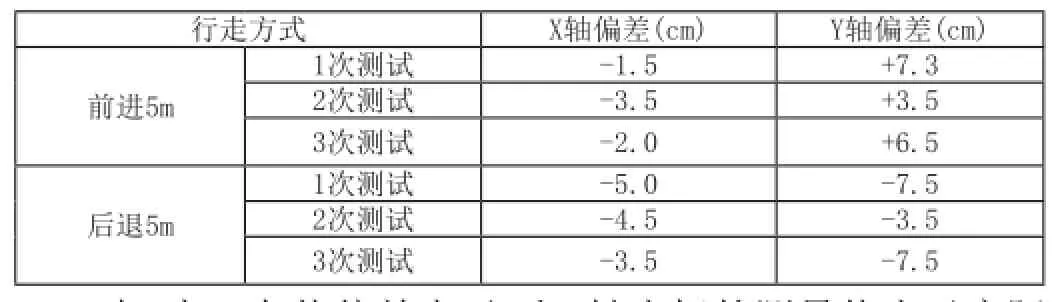
表1 护理机器人直线行走精度测试结果
表1中,负值偏差表示X和Y轴坐标的测量值少于实际值,正值偏差则是测量值大于实际值。从表中可知,误差最大为1.5%。
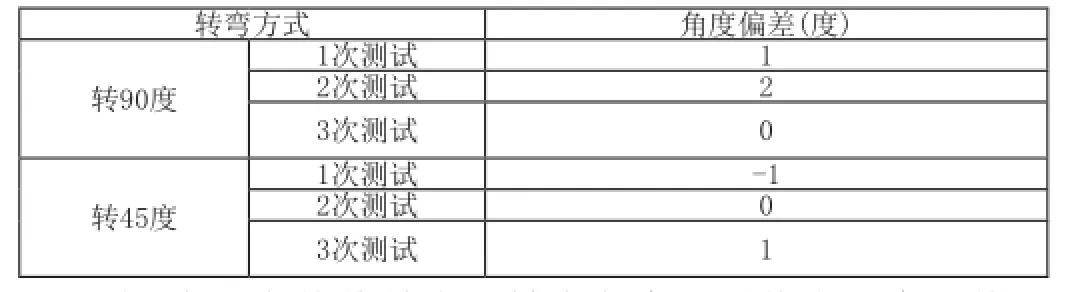
表2 护理机器人转弯精度测试结果
表2中,负值偏差表示转弯角度测量值少于实际值,正值偏差则是测量值大于实际值。从表中可知,误差最大为2.2%。
4 结论
护理机器人控制系统根据超声波测距方式进行全局定位,采用码盘和电子罗盘相结合方式进行局部定位,机器人的室内定位精度良好。同时,通过全局定位和局部定位之间的相互切换,以及全局定位对局部定位的实时修正,可以实现机器人根据上位机的路径规划在室内自主巡航,并且精度上也有较好的保障。
[1]GRAF B,HANS M,SCHRAFTL R D.Care-O-bot IIDevelopment of a Next Generation Robotic Home Assistant[J].Autonomous Robots,2004,16(2):193-205.
[2]陆新华,张桂林.室内服务机器人导航方法研究[J].机器人,2003,25(1):80-87.
[3]陈明芽,项志宇,刘济林.单目视觉自然路标辅助的移动机器人定位方法[J].浙江大学学报:工学版,2014,48(2):285-291.
[4]原玉磊,王安健,蒋理兴.一种使用红外线和超声波的定位技术[J].电子测量技术,2008,31(10):15-17.
[5]张世哲.基于惯性传感器和WiFi的定位系统的设计与实现[D].北京:北京邮电大学网络技术学院,2012.
[6]陈睿莹,张正华,刘学,尹丝,邵珠要.移动机器人激光测距中微弱信号的检测与分析[J].电子世界,2014(16):100-101.
[7]Barkana Y,Belkin M.Laser eye injuries[J].Surv Ophthal mology,2000,44(65):459-478.
[8]唐颖,张凡,郭勇.移动机器人的超声波测距传感器设计[J].传感器技术学报,2010,23(11):1646-1649.
孔庆莹(1955—),男,广东南海人,大学本科,现供职于佛山新大通工艺电器有限公司。
王波(1989—),男,广西梧州人,硕士研究生,现就读于广东工业大学自动化学院。
李青云(1988—),女,湖南衡阳人,大学本科,现供职于广东必达电器有限公司。
夏雪(1991—),男,湖南邵阳人,硕士研究生,现就读于广东工业大学自动化学院。