基于双控制技术的智能机器导盲犬的设计与实现
2015-11-07花良浩杨润贤
花良浩,杨润贤
(扬州工业职业技术学院,江苏 扬州 225127)
基于双控制技术的智能机器导盲犬的设计与实现
花良浩,杨润贤
(扬州工业职业技术学院,江苏 扬州 225127)
本文主要介绍以MultiFLEX2-PXA270控制器和STC89C52RC单片机为核心的智能机器导盲犬一种设计,并利用NorthSTAR程序编写器及Kill-Uv4进行软件开发,构建轮式移动仿生型机器导盲犬。机器导盲犬以“u_blox-neo_6m”GPS模块实现定位导航功能,采用五路超声波测距传感器检测障碍物,利用视频传感器辨别道路等状况,以双系统控制平台采集数据,实现自主避障、定位导航、语音控制/提示等功能,以及控制的自动化,为智能导盲犬的设计提供了一种思路,具有非常广泛的实用价值。
机器导盲犬;双控制器;避障;GPS导航;语音控制
导盲犬是一种工作犬,其主要工作是代替视障人士的双眼,为他们领路。但事实上,各类犬种的导盲犬需花费很大一部分的人力、时间去培养,成本很高,市场销售价格也极其昂贵。就我国目前的市场调研情况来看,记录在册的导盲犬数量极少,并且具备引领盲人出行功能的此类导盲犬更是凤毛麟角,导盲犬的训练成本极高,训练时间长久,人与犬直接的融洽交流也需要时间培养,因此,基于双控制技术的智能机器导盲犬的研发引起了人们的关注。双控制技术充分弥补了单一控制技术的局限性,为智能导盲犬提供了崭新的思路。
在智能机器导盲犬应用领域,国外的技术相对成熟,如日本精工株式会社(NSK)和电气通信大学研制出的一款机器导盲犬,该机器导盲犬原型已经进入第三阶段,该导盲犬采用微软的XBOX体感外设Kinect机器人进行探测,当机器掌握周围地形环境之后便指导盲人行走,帮助盲人更有效地避免各种障碍,更好地完成爬楼梯等工作。但是定位导航是此机器导盲犬的一大遗憾,这给盲人的安全出行带来极大的不便。而且昂贵的价格也让人们望而却步。哈尔滨理工大学研发的机械导盲犬,具有循迹、绕障功能,语音播报功能,GPS导航功能和太阳能电板,目前此款机器还仍处于实验室开发阶段,并且此款机器导盲犬携带不便,而且无人机对话功能,这样人与机器之间就无法沟通。河南理工大学研发的智能导盲车具有GPS自主导盲、人动力牵引、语音播报、GSM获取盲人位置信息、倾角传感器倾翻报警。由于导盲车的笨重繁琐、人力牵引,给盲人带来许多出行的不便,而且GSM获取盲人位置信息只可以在小区、公园等小范围区域内进行正常活动,盲人在途中要改变航线,只能通过重启方式改变目的地,操作过于麻烦。目前还没有能够实际应用在各种路况环境下的智能机器导盲犬,应用与实际日常生活中的智能机器导盲犬功能不全,安全系数不高。
本 文 以 MultiFLEXTM2-PXA270控 制 器 和STC89C52RC单片机控制协同控制,充分结合各个控制器的优点,通过各类传感器组合检测当前环境,并通过语音系统实现人机交流控制。弥补了国内导盲产品的空缺,为盲人出行带来方便,且集齐优点于一体,产品价格低廉,拥有广阔的市场前景。
一、智能机器导盲犬总体设计
1.系统功能设计
(1)语音定点定位导航功能
此功能由51单片机以及MultiFLEXTM2-PXA270控制器配合控制实现,由MultiFLEXTM2-PXA270控制器接收到准确语音指令后确定与指令相关的目标地点,并利用单片机实现与GPS定位器的实时通信,根据GPS提供的实时地点实现准确的导航功能,然后按照预定轨迹运行。
(2)智能避障及道路边线循迹功能
在自动导航过程中,机器犬遇到障碍物可自动选择绕行,并根据绕行距离计算出航向的偏离程度,GPS重新进行定位,依据原有导航路线数据,驱动机器人移动部分,重新回到原有路径。
在道路边线循迹过程中,将利用循迹模块以及视觉传感器双重判断道路边线,并根据检测信息使机器人始终保持在道路边线行驶。
(3)目标识别功能
机器犬到达导航地点后,利用视觉传感器将全方位检测下的图像转换到HIS空间,根据H色调数据与存储在MultiFLEXTM2-PXA270控制器中的目标的H色调标识相比较,当目标信息基本符合后,机器人向目标先进,自此机器人到达目标点。
(4)语音聊天及娱乐功能
机器导盲犬在程序编写过程中,利用 Multi-FLEXTM2-PXA270控制器以及机器犬身体各部分硬件,可以实现智能机器导盲犬的简单的语音聊天功能、音乐播放以及玩耍跳舞等娱乐功能。
此外,整套系统在硬件和软件方面都具有良好的可扩展性,便于系统的功能升级和外接其他传感器的功能拓展。
2.系统总体结构设计
随着社会对智能机器功能要求越来越高。系统设计开发难度大,精确度不高,可扩展性不强,结合系统功能设计要求,本文基于MultiFLEXTM2-PXA270控制器和STC89C52RC单片机设计的智能机器导盲犬来解决上述问题。
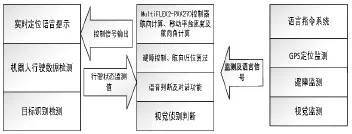
图1 智能机器导盲犬总体结构框图
上图为本文设计的机器导盲犬系统总体结构框图,整个设计主要由以下几个部分组成:
(1)MultiFLEXTM2-PXA270控制器航向计算、移动平台速度及航向角计算:主要完成机器人实时定位及导航算法。
(2)避障控制、航向归位算法:实现机器人各类环境下的避障功能,以及机器人回归原始航向功能。
(3)语音判断及对话功能:接受盲人的语音指令,判断指令正确与否,实现与盲人的沟通和娱乐功能。
(4)视觉侦别判断:准确判断目标,在反复检测后,帮助盲人到达最终目的地。
整个系统利用各传感模块和对应算法实现机器导盲犬的最终导盲功能。盲人将通过语音系统指令控制机器人,GPS定位、避障、视觉检测模块帮助机器人正确规划路径,以及安全行驶能力。系统在运行过程中实时采集当前环境数据,语音提示盲人,检测机器人行驶路线,并在目标出现后正确判断目标的功能。
二、系统的硬件组成
机器导盲犬硬件部分如图2所示。图2中,Multi-FLEXTM2-PXA270控制器、STC89C52RC单片机为机器导盲犬的控制部分,五路超声波测距模块由STC89C52RC型单片机控制,分左、左前、中、右前、右五组方位探测障碍物信息。GPS定位模块由u_blox-neo_6m接收机天线一体式定位模块为单片机提供位置信息。电子罗盘模块由HMC5883为系统提供航向信息。视觉检测模块为Mul-tiFLEXTM2-PXA270控制器提供实际环境道路各类路口的信息。巡线模块利用灰度传感器检测道路边线,帮助盲人靠边行走。语音模块为盲人提供各类语音及报警提示,并实现盲人的口令动作。倾覆模块检测不平稳或倾斜路段,为系统提供运行报警,并通过语音模块提示盲人。
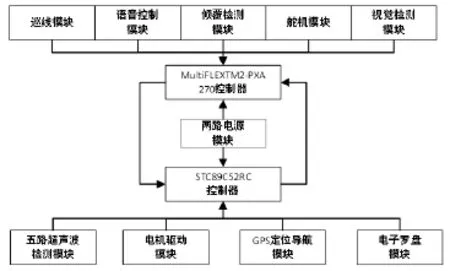
图2 机器导盲犬硬件设计
三、系统的软件组成
智能机器导盲犬主要分为两部分组成,Multi-FLEXTM2-PXA270控制器和STC89C52RC单片机。
1.基于MultiFLEXTM2-PXA270采用NORTHSTAR图形化编程,在windows下有良好的操作界面,智能机器导盲犬总体流程图如图3所示。
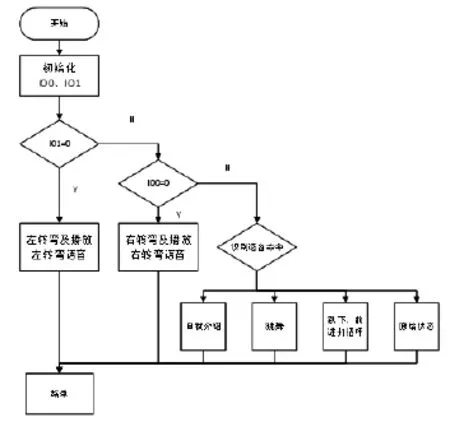
图3 智能机器导盲犬流程图
2.整个导航定位模块由STC89C52RC单片机控制,采用u_blox-neo_6m的GPS定位模块,利用RS232通信为控制器提供当前位置数据。其导航功能具体如图4所示。
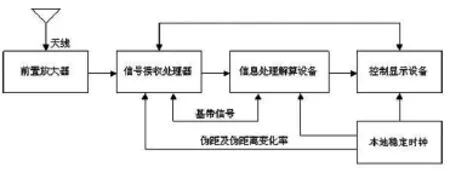
图4 导航功能控制图
GPS模块上电工作时,通过GPS接收天线接收GPS卫星发射的定位信号,经过CPU主控器处理,计算出车辆的日期、时间、经纬度、速度和行驶方向等定位数据,并将计算出的GPS数据以RS232通信接口传送给MultiFLEXTM2-PXA270控制器,利用控制器内部导航算法实现机器人导航功能。
本文所设计的机器人导盲犬在分析导航、避障、目标识别模块的基础上,提出了系统导航、避障原理及视觉追踪的原理及算法,综合了三大类传感模块实现了双控制器机器人在无人引导环境下的导盲功能。本系统的实际导盲功能还有很高的提升空间,如实现记忆导航,更高精度避障及环境识别功能,提高对各类道路目标的识别度,实现机器人在短距离、最准确定位的导盲功能。总的来说,该机器导盲犬系统,初步实现了简单环境下对盲人引导的实用性功能,获得全国职业院校技能大赛创新成果交流赛一等奖。
[1]韩雪峰.导盲机器人[D].哈尔滨工程大学,2009.
[2]李伟伟,苗壮,王玉凯,薛吉星.基于GPS的园区导盲车设计[J].科技与企业,2011(10):117-119.
[3]R·西格沃特,IoR·诺巴克什,D·斯卡拉穆扎.自主移动机器人导论[M].李人厚,宋清松,译.西安:西安交通大学出版社,2013.
[4]孙育才,孙华芳.MCS-51系列单片机及其应用[M].南京:东南大学出版社,2012.
[5]彭伟.单片机C语言程序设计实例100例A Modified Approach to Observer-based FaultDetection[C].北京:电子工业出版社,2011.
[6]张强,吴云东,杨天恒.数字罗盘在超低空遥感平台的应用[J].测绘科学技术学报,2007(2):43-47.
[7]袁书明,杨晓东,陈建华.导航系统应用数学分析方法[M].北京:国防工业出版社,2013.
T-1
A
1673-0046(2015)11-0194-03
中央财政支持的职业教育实训基地建设项目(苏教财[2012]117号),江苏省大学生实践创新训练计划(201513754004Y,201513754005Y),扬州市工程技术研究中心。]