基于北斗卫星导航系统的空间站姿态测量可行性分析
2015-11-07赵思浩清华大学电子工程系北京00084中国空间技术研究院载人航天总体部北京00094
赵思浩,黄 才,齐 鑫(.清华大学电子工程系,北京00084;.中国空间技术研究院载人航天总体部,北京00094)
基于北斗卫星导航系统的空间站姿态测量可行性分析
赵思浩1,黄才2,齐鑫2
(1.清华大学电子工程系,北京100084;2.中国空间技术研究院载人航天总体部,北京100094)
为了探索北斗全球卫星导航系统应用于中国空间站姿态测量的技术可行性,调研了中国未来空间站运营时北斗全球系统导航星座情况,给出了北斗系统对空间站的服务能力;基于载波相位高精度测量原理,对载人空间站利用北斗全球系统完成姿态测量所需的技术条件进行了分析,首次提出了在空间站三舱分别配置北斗天线,使用基于北斗导航信号载波相位的高精度测量算法进行组合体姿态测量的技术思路,初步给出并分析了相应的设备配置和工作方案,并对其在轨运行时的姿态角测量精度进行了仿真分析。在配置三天线组成两条10 m量级基线条件下,仿真的姿态角测量均方根误差约为0.05°。在具备相应信息处理和通信能力的条件下,利用北斗全球系统接收机可以完成空间站姿态测量功能,具有技术可行性。
空间站;北斗卫星导航系统;双基线;姿态测量;可行性
1 引言
我国空间站工程即将进入实施阶段,拟于2020年前后建成由多个舱段组合运行的大型载人空间站,能够长期开展近地空间有人参与的科学技术试验及综合开发利用太空资源,并具备10年的设计寿命[1]。作为全球四大导航卫星系统(GNSS)之一,北斗卫星导航系统(BDS)自2012年底以来已经形成了区域服务能力,可以为中国和周边地区地面和空间提供定位导航授时服务[2]。据计划,至2020年,北斗系统将逐步形成由多颗地球静止轨道(GEO)卫星和非地球静止轨道(Non-GEO)卫星组成的全球导航系统[3,4]。
作为交会对接和定位测姿的手段之一,GNSS在载人航天器当中应用广泛,如航天飞机等载人航天器使用美国全球定位系统(GPS)进行自身位置测量[5,6],日本、欧洲等使用GPS作为载人航天器交会对接绝对定位和相对测量的手段之一[7];俄罗斯联盟号飞船装备了格洛纳斯接收机[8];我国载人航天器也配置了GNSS设备[9,10]。值得一提的是,国际空间站除了利用GPS完成位置测量外,还利用4副天线构成1.5m×3m长方形布局用于进行姿态测量[6],与陀螺数据集成处理后达到了0.5°的精度要求[11]。
目前航天器姿态测量主要依靠惯性测量单元、太阳敏感器、星敏感器等设备,GNSS设备主要用于完成航天器绝对位置/速度测量和交会对接相对位置/速度测量,同时可以支持地面测定轨任务。如果空间站组合体能利用已有GNSS设备和通信路径完成观测量传输和联合处理,则可以在不增加或少量增加设备数量和重量的前提下为姿态测量提供补充备份手段。
我国载人空间站拟充分利用北斗系统完成测定轨和交会对接任务[12],也意味着各舱段可能分别配置北斗导航接收机,这就使得利用多舱段北斗天线形成多条基线用于空间站组合体姿态测量成为可能。同时,空间站将是我国在轨飞行的最大的航天器,这也使得将多个北斗天线布置于更远的间隔成为可能,而更长的天线间距(基线)将带来更高的测量精度,这也是其他航天器所不能比拟的优势。
本文首先对未来空间站运营阶段的北斗系统的星座情况和服务能力进行分析;接下来对导航信号载波相位双差姿态测量原理进行了讨论;根据姿态测量所需技术条件,提出空间站组合体利用北斗系统进行测姿的一些技术思路;提出了一种三舱段配置北斗天线组成两条基线的姿态测量方案,并建立了仿真场景对姿态角测量精度进行了仿真分析;最后给出了本文的主要结论。
2 北斗全球系统的服务能力
根据文献[3],北斗全球系统空间星座由5颗GEO、3颗倾斜地球同步轨道(IGSO)卫星和27颗中圆地球轨道(MEO)卫星组成,其中,GEO卫星分别定点于东经58.75°、80°、110.5°、140°和160°;3颗IGSO轨道高度36000 km,均匀分布于3个倾斜同步轨道面上,轨道倾角55°,3颗IGSO星下点轨迹重合,交叉点经度为东经118°,相位差120°;27颗MEO高度21500 km,均匀分布于3个轨道面[3]。仿真的北斗全球星座如图1所示。
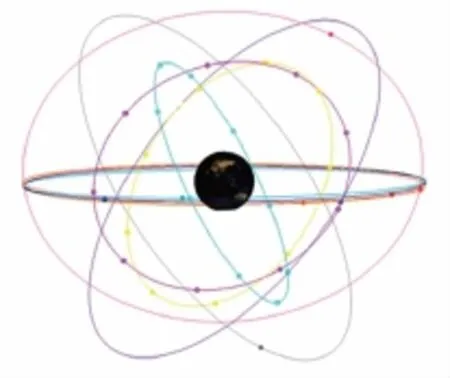
图1 北斗全球系统星座仿真示意图Fig.1 Simulated global BDS constellation
我国空间站运行轨道为倾角42°~43°,高度340~450 km的近圆轨道[1],按照表1的参数建立仿真环境。同时假设空间站飞行过程中保持三轴稳定对地,北斗接收天线指向天顶,视场半锥角75°,仿真时间6天,步长1 min。
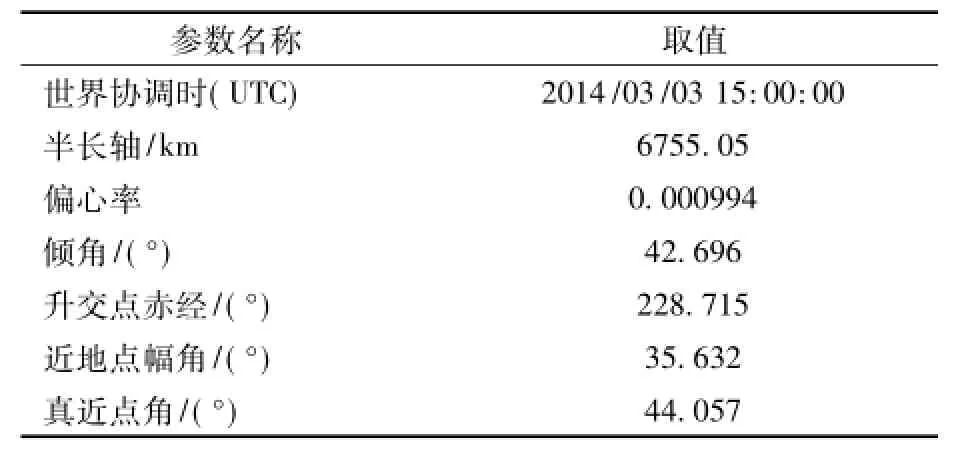
表1 空间站轨道仿真参数Table 1 Simu lated orbital parameters of space station
仿真得到的在空间站轨道处可见的北斗卫星数量统计结果如表2所示。
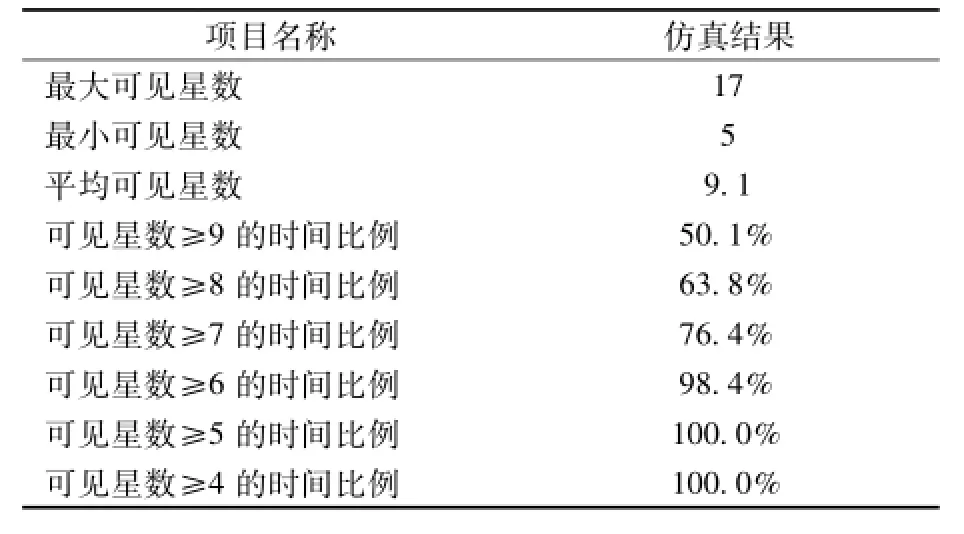
表2 空间站可见北斗卫星数统计结果Table 2 Statistics of number of visible BDS satellites for space station
由仿真结果可知,在空间站全部轨道范围内可以收到不少于4颗北斗卫星的信号,可利用这些信号完成自身绝对位置测量。进一步地,在空间站全部轨道区域内可见的北斗卫星数量不少于5颗,如果配置多台北斗导航接收机,则可以利用北斗导航信号完成载波相位双差相对测量任务,获得高精度相对测量结果,因此,在载人空间站全部轨道区域内,北斗系统可以提供满足高精度相对测量要求的星座覆盖能力。如果空间站配置不少于三台北斗导航接收机,其多副接收天线可以组成2条以上的线性无关基线,那么可以利用高精度测得的多基线完成姿态测量功能。
在地面利用北斗载波相位实时测量基线的试验结果表明了其用于高精度相对测量的有效性[13,14],同时,10 m量级长度基线的均方根测量误差在1 cm以内[14,15]。在空间站轨道处,大气极为稀薄,大气层对信号传播造成的误差相对地面有极大削弱,有利于进一步提高测量精度;同时航天器飞行速度快,有利于提高实时高精度解算的收敛速度。
由以上仿真和实测结果可知,北斗全球系统具有为载人空间站利用提供高精度姿态测量服务的能力。
3 基于载波相位的姿态测量原理
为了获取载体的信息,需要测量载体坐标系(b系)到导航坐标系(n系)的旋转姿态角,俯仰、横滚、偏航三个角度是姿态信息的一种表达,坐标系和姿态角定义可参见文献[16]。n系到b系的旋转矩阵记为C,则C可以表示为公式(1):
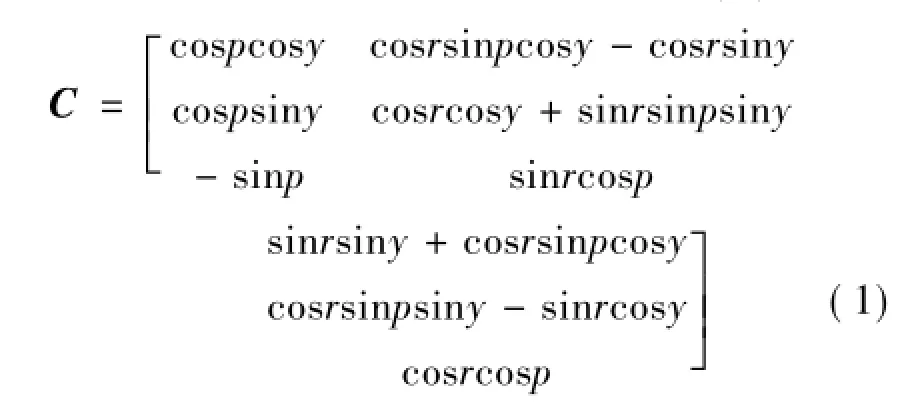
其中,r为横滚角,p为俯仰角,y为偏航角,表示n系内的刚体先绕自身x轴旋转y角度,再绕旋转后的y轴旋转p角度,最后绕旋转后的z轴旋转r角度,旋转示意图如图2所示。
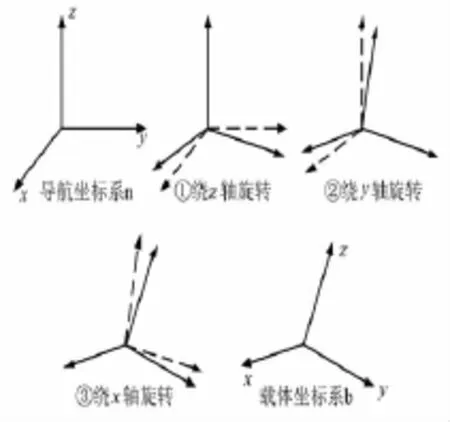
图2 坐标旋转示意图Fig.2 Coordinate rotation diagram
由以上分析可知,载体在导航坐标系中的姿态角可以通过解算b系与n系之间的旋转矩阵获得姿,这需要具备两个不相关矢量在b系和n系下的表达。记v1、v2为两个不相关矢量,且可以通过测量手段分别获得在b系和n系下的表达,记在b系下的表达为v1b、v2b,在n系下的表达为v1n、v2n,则有公式(2):

解该非线性方程组可获得y、p、r值。
载体坐标系下的矢量可通过在载体上直接测量获得,为进行姿态测量,需要对该矢量在导航坐标系下的表达进行测量。同时,在导航坐标系下的测量结果需要具有较高精度才能保证最终姿态信息的准确性,因此这里使用基于卫星导航信号载波相位的方法进行基线测量,相对于使用卫星导航信号伪距,使用载波相位具有更高的测量精度[17]。载波相位与基线矢量的关系如图3所示。
将基线两端分别记为B与R,卫星导航信号的载波相位观测方程如公式(3)、(4)所示。
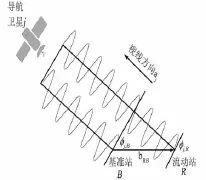
图3 载波相位与基线矢量关系Fig.3 Relationship between carrier phase and baseline vector
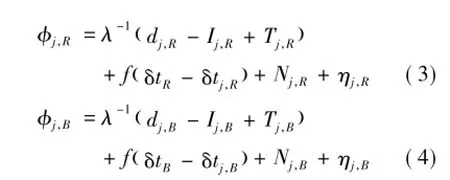
其中,φ为载波相位(单位为载波周数),λ为载波波长(单位m),d为卫星与用户的真实几何距离(单位m),T为对流层延迟误差(单位m),I为电离层延迟误差(单位m),f为载波频率(单位Hz),δtR为用户接收机时钟误差(单位s),δtj为卫星时钟误差,N为载波整周模糊度(由于接收机只能得到载波相位的小数部分,因此存在该模糊度),ε、η分别为伪距和载波相位观测误差,通常该误差被模型化为正态分布的随机误差,可包含多路径误差和接收机噪声等误差项,以GPS L1载波和粗捕获码(C/A码)为例,其误差可粗略估计为伪距误差1 m量级,载波相位误差1 mm量级[17],i、j为观测到的卫星编号。
在R与B及卫星i和j之间进行二次差分,在近距离条件下可以消除电离层误差I和对流层误差T,于是有公式(5)。

公式(5)给出了短基线条件下载波相位双差观测模型,用户所关心的基线矢量隐藏于双差几何距离dji,RB项当中,将其在B和R各自估计位置处展开并保留一阶项如式(6)。

其中,aj,R为R接收机指向第j颗卫星的视线方向归一化矢量,并假设R与B与同一颗卫星间的视线矢量相等,即aj,R与aj,B相等,bRB为B指向R的基线矢量。当R接收机与B接收机同时观测到多颗卫星时,可对不同卫星获得公式(5),同时结合无模糊度的伪距测量方程以及多个历元的观测方程组成方程组,使用某些算法如最小二乘去相关算法[18]获得公式(5)中的整周模糊度N,而后利用公式(6)即可获得高精度基线矢量。
当载体具有不少于两条线性无关矢量时,在在导航坐标系下对它们进行载波相位双差测量,获得精确基线矢量后可以通过多种手段计算姿态角,利用公式(1)、(2)是其中的一种解得姿态角的方法。
在工程应用中,R和B接收机各自输出载波相位观测量,需要将二者的观测量进行联合处理,这就需要R和B之间具有通信链路或配置某一中心处理设备集中接收和处理R和B的观测信息。
4 空间站应用北斗测姿的初步构想
根据文献[1],我国的载人空间站基本构型如图4所示。
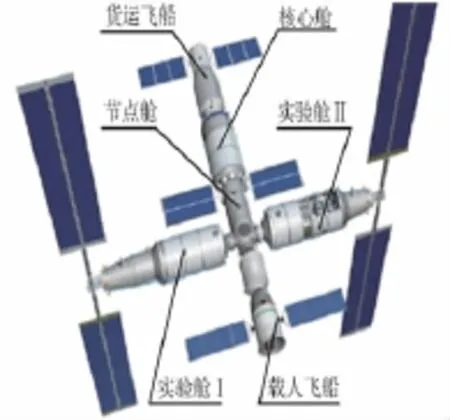
图4 空间站基本构型[1]Fig.4 Basic configuration of space station
根据前文对基于卫星导航系统的载波相位测量技术的介绍,为应用北斗导航系统完成空间站组合体的姿态测量,需要具备以下3方面条件。
1)多条线性无关的基线矢量
核心舱、实验舱I和实验舱II组成刚性组合体长期在轨运行,如果三舱均配置北斗接收机和天线,则在组合运行阶段可获得基线长度固定且相对关系稳定的两条线性无关的基线矢量,三舱可按照图5所示配置北斗接收天线,若以核心舱天线B为参考基准,则可以分别建立与实验舱I天线R1和实验舱II天线R2两条基线,两条基线长度约为10 m量级。
2)高质量的载波相位观测量
北斗接收天线需要具有良好的增益特性和稳定的信号相位中心,并且尽量抑制多径信号的影响,为此需要对天线本体设计、布局位置进行仔细考虑,如果条件允许也可以采取架高、增加扼流圈等方法以提升射频信号接收质量;接收机设计当中也需要综合考虑射频前端和基带模块对导航卫星信号动态、灵敏度等的优化处理,例如降低处理噪声、减小处理损耗、增加频率源稳定度等等以尽量输出高质量的载波相位观测信息。
3)观测量的传输与处理
除三舱段分别配置以上三副接收天线和北斗接收机外,还需要将三台接收机的观测量进行联合处理获得双差观测量并进行基线解算,这需要配置有线或无线传输链路使得三台接收机输出的载波相位观测量能够集中于某一位置被综合处理。这里初步提出以下4种可以考虑的方案(如图6所示):①如果核心舱接收机将输出的观测量通过无线或有线通信链路分别发送给实验舱I/II接收机,则实验舱I/II的接收机可以分别解算B-R1与B-R2基线,然后利用下行链路回传地面进行姿态解算,该方案需要天地通信和地面处理,将会占据无线通信带宽并引入一些延迟;②将实验舱I/II的接收机观测数据传输至核心舱北斗接收机,由核心舱北斗接收机完成在轨实时姿态测量任务,该方案在具备空间站内数据通路且核心舱北斗接收机具备处理能力的条件下可以完成实时姿态测量;③考虑使用其他设备接收3台接收机观测数据进行联合处理,以在轨完成实时姿态测量,该方案需要站内数据通路支持并且配置专用设备或在通用计算机上配置姿态解算软件;④将三台接收机观测数据通过无线链路下传至地面进行集中处理,该方案需要占用下行数据链路并且需要地面计算机软件支持,在地面存储长期数据并进行后处理的情况下可以获得更高的姿态测量精度。
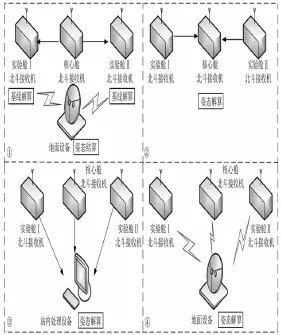
图6 四种初步方案Fig.6 Four prelim inary schemes
5 空间站姿态测量仿真分析
参照图5布置三副天线,并设定在空间站载体坐标系中的位置如表3所示。
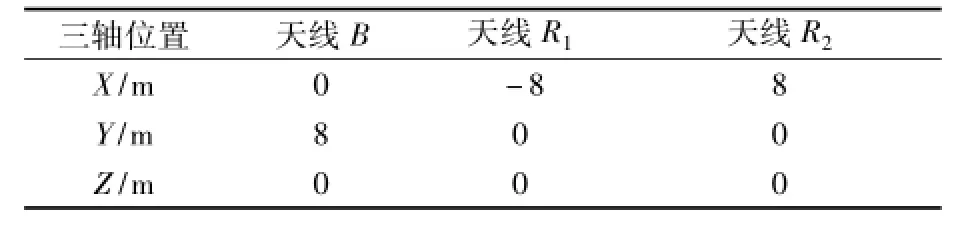
表3 空间站载体坐标系中的三天线仿真位置Table 3 Position settinjs for the three antennas in body frame
空间站轨道参数同表1。建立空间站三轴稳定对地飞行的仿真场景,仿真时间6天,步长1 min,共计8640个仿真历元。仿真获得每个历元B、R1、R2在地心地球固连坐标系(ECEF)下的三维绝对位置作为其位置真实值。
以核心舱天线B为主参考站,在仿真的天线B三轴绝对位置结果上添加误差以模拟其利用伪距观测量获得的单点绝对定位误差,依据文献[2],北斗系统以95%的置信度提供优于10 m的定位精度,在仿真中使用更大的误差,即在三轴真实位置上添加标准差为10 m的随机误差(约以95%的置信度提供20 m定位精度);在天线R1、R2仿真的真实位置结果上分别添加标准差为1cm的随机误差,以模拟其高精度基线测量误差。
为计算横滚、俯仰和偏航角,首先将B-R1与B-R2两个基线矢量转换至以B为原点的北东地导航坐标系(NED)下,然后通过公式(1)、(2)解得姿态角。将解得的姿态角与仿真得到的真实姿态角比较得到姿态误差。姿态误差仿真结果如图6所示。
图7给出的姿态误差仿真结果与真实值之间具有较好的一致性,与真值比对得到的均方根误差分别为横滚角:0.0498°,俯仰角:0.0516°,偏航角:0.0357°。以上仿真结果仅利用了单历元观测信息,没有使用任何滤波算法对历史信息进行利用,且添加的测量误差均大于北斗系统标称误差和地面实际测量误差,因此仿真得到的是一个相对保守的性能估计,实际在轨应用时,可以使用某些滤波算法如卡尔曼滤波器或利用先验信息和约束条件如事先精测的基线长度使得姿态角测量精度得到进一步提升。
空间站在轨的实际应用环境一般会优于仿真条件。例如载人航天轨道处于大气层外,基本不存在大气层对信号传播的影响,且空间站配置的北斗接收天线经过优化设计后相比地面设备可具有更高的观测质量,对射频、接收机、信号处理算法的优化设计也可改进性能,因此,最终在轨姿态测量误差可望优于仿真结果。

图7 姿态误差仿真结果Fig.7 Sim ulation results for attitude errors
6 结论
本文分析了北斗全球卫星导航系统的星座情况和服务能力,分析表明,未来北斗全球系统具备向载人空间站提供高精度姿态测量服务的能力;接下来讨论了空间站应用北斗导航系统进行姿态测量所需的技术条件,提出了一种三舱配置北斗天线组成双基线进行姿态测量的简要方案构想,并对其四种可能的工程实现方式和设备配置提出了建议并进行了初步分析通过数值仿真得到的姿态角测量均方根误差约为0.05°。
论文分析表明利用多舱段北斗接收天线组成多基线进行姿态测量可以作为空间站其他姿态测量手段的有效补充和备份,在空间站多舱段配置能输出高质量载波相位观测量的北斗天线和接收机,并具备数据传输通道和相应信息处理能力的条件下具有技术可实现性。
[1]周建平.我国空间站工程总体构想[J].载人航天,2013,19(1):1-10. Zhou J.Chinese Space Station Project Overall Vision[J]. Manned Spaceflight,2013,19(1):1-10.(in Chinese)
[2]BDS-OS-PS-1.0北斗卫星导航系统公开服务性能规范[S].1.0版.中国卫星导航系统管理办公室,2013. BDS-OS-PS-1.0 BeiDou Navigation Satellite System Open Service Performance Standard[S].Ver 1.0.China Satellite Navigation Office,2013.(in Chinese)
[3]北斗卫星导航系统发展报告[R].2.2版.中国卫星导航系统管理办公室,2013. Report on the Developmentof BeiDou Navigation Satellite System[R].Ver 2.2.China:China Satellite Navigation Office,2013.(in Chinese)
[4]BDS-SIS-ICD-2.0北斗卫星导航系统空间信号接口控制文件公开服务信号[S].2.0版.中国卫星导航系统管理办公室,2013. BDS-SIS-ICD-2.0 BeiDou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal[S].Ver 2.0.China Satellite Navigation Office,2013.(in Chinese)
[5]Goodman JL.Space shuttle guidance,navigation,and rendezvous knowledge capture reports[R].JSC-66136 Revision 1,2011.
[6]Goodman JL.Application of GPS navigation to space flight[C]//Aerospace Conference,2005 IEEE.IEEE,2005:1837-1852.
[7]Chullen C,Blome E,Tetsuya S.H-II Transfer Vehicle(HTV)and the operations concept for Extravehicular Activity(EVA)hardware[R].JSC-CN-23357,2010.
[8]Branets V,Mikhailov M,Stishov Y,et al.“Soyuz”-“Mir”Orbital Flight GPS/GLONASS Experiment[C]//Proceedings of the12th International Technical Meeting of the Satellite Division of The Institute of Navigation(IONGPS 1999).1999:2303-2312.
[9]陈相周,顾侧峰,吕大奎.神舟号载人飞船船载测控通信分系统[J].上海航天,2006,22(5):9-13. Chen X,Gu C,Lv D.The space-borne TT&C telecommunication subsystem of Shenzhou manned spaceship[J].Aerospace Shanghai,2006,22(5):9-13.(in Chinese)
[10]张庆君,余孝昌,左莉华,等.神舟载人飞船测控与通信分系统的研制[J].航天器工程,2004,13(1):97-103. Zhang Q,Yu X,Zuo,et al.Shenzhoumanned spacecraft TT&C and communication system development[J],Spacecraft Engineering,vol.13,97-103.2004.(in Chinese)
[11]Pendergrass JR,Treder A J.GPS-updated attitude determination on iss despite rich multipath[C]//Proc.of AIAA Guidance,Navigation and Control Conference,Denver,CO,2000
[12]王忠贵.载人空间站工程测控通信系统挑战和机遇[J].飞行器测控学报,2013,32(4):281-285. Wang Z.Challenges and Opportunities facing TT&C and Communication Systems for China’s Manned Space Station Program[J].Journal of Spacecraft TT&C Technology,2013,32(4):281-285.(in Chinese)
[13]Zhao S,Cui X,Guan F,et al.Kalman Filter-Based Short Baseline RTK Algorithm for Single-Frequency Combination of GPS and BDS[J].Sensors,,2014,14(8):15415-15433.
[14]Odolinski R,Teunissen P J G,Odijk D.First Combined COMPASS/BeiDou-2 and GPSPositioning Results in Australia.Part II:Single-and Multiple-frequency Single-baseline RTK Positioning[J].Journal of Spatial Science,2014,59(1):25-46.
[15]王世进,秘金钟,李得海,等.GPS/BDS的RTK定位算法研究[J].武汉大学学报:信息科学版,2014,39(5):621-625. Wang S,Bei J,Li D,et al.Real-time kinematic positioning algorithm of GPS/BDS[J].Geomatic Information Science of Wuhan University,2014,39(5):621-625.(in Chinese)
[16]Titterton D H,Weston J L.Strapdown Inertial Navigation Technology[M].2nd ed.Lexington,Massachusetts:MIT Lincoln Laboratory,2004:21-22,40.
[17]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:72. Xie G.Principles of GPS and Receiver Design[M].Beijing:Publishing House of Electronics Industry,2009:72.(in Chinese)
[18]Teunissen P J G.The Least-square Ambiguity Decorrelation Adjustment:a Method for Fast GPS Ambiguity Estimation[J].Journal of Geodesy,1995,70(1-2):55-82.
Feasibility Analysis for Space Station Attitude M easurement Based on BeiDou Navigation Satellite System
ZHAO Sihao1,HUANG Cai2,QIXin2
(1.Department of Electronic Engineering,Tsinghua University,Beijing100084,China;2.Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
To investigate the technical feasibility of determining the attitude of space station using BeiDou Navigation Satellite System(BDS),the authors first reviewed the constellation situation of the global BDS during the operation phase of the forthcoming Chinese Space Station,and presented the service ability of BDS for Chinese Space Station.The technical conditions required for BDS-based attitudemeasurement for Chinese Space Station was analyzed after a presentation of the carrier phase based high precisionmeasurement technique.The technical approach of installing three antennas on the three space station cabins respectively for attitude measurement based on BDS carrier phase high precision measurement algorithm as well as the corresponding device configuration and working scheme were proposed and analyzed for the first time.The on-orbit attitude anglemeasurement errors were simulated and analyzed.The simulated rootmean square errors of themeasured attitude angles could reach about0.05°under the condition of two 10m level baselines formed by three BDS receiving antennas,and it is feasible to conduct the attitudemeasurement task of the Chinese Space Station by using the global BDS receivers provided proper information processing and communication capabilities.
space station;BeiDou navigation satellite system;double-baseline;attitude;feasibility
V443;TN967.1
A
1674-5825(2015)02-0135-07
2014-09-12;
2015-03-06
中国博士后科学基金(2014M550732)
赵思浩(1982-),男,博士,助理研究员,研究方向为卫星导航定位技术、航天器测控与通信技术。E-mail:zsh_thu@tsinghua. edu.cn
