基于变电站智能巡检机器人智能移动的研究及应用
2015-11-05毛健王忠扬袁发强李肃吕政扬许毅
毛健王忠扬袁发强李肃吕政扬许毅
(1.遵义供电局,贵州遵义 553000;2.厦门加能电力科技有限公司,福建厦门 361012)
基于变电站智能巡检机器人智能移动的研究及应用
毛健1王忠扬1袁发强1李肃1吕政扬2许毅2
(1.遵义供电局,贵州遵义 553000;2.厦门加能电力科技有限公司,福建厦门 361012)
目前,对于一些少人或无人值守的高压变电站来说,变电站智能巡检机器人的广泛应用正在得到逐步的实现。而机器人智能移动模式的水平高低则是其可靠、高效运行的关键所在。因此,本文对其智能移动进行了深入的研究。机器人的智能移动行走是需要导航的,通过导航的方式对其进行引导和定位,而这种导航的更替发展,也确立了目前智能视觉识别导航技术的不断开发升级,以及对其在导航行走过程中相应产生的关联性智能紧障功能的相应研究,来阐述智能移动发展和改进对于机器人运行工作的重要性。通过提高智能移动的技术水平,将会使得变电站巡检机器人的工作效率大大提高,增加其工作过程中的安全可靠性,使其能够更高效安全的服务于变电站巡检的工作之中。
变电站智能巡检机器人 智能移动模式 智能视觉识别导航技术 智能避障
随着科技进步和电力体制改革的不断深入和发展,变电站的日常巡检维护越来越趋向于智能化。这也催生了具有先进技术的智能巡检机器人服务于变电站之中。变电站智能巡检机器人来执行日常巡视检查任务已经成为变电站巡检的一个趋势。机器人智能移动技术的不断提高和应用范围的不断扩大,将在工业、国防、服务等行业中得到广泛的应用,所以,机器人的智能移动应用在变电站上是一个可行可操作的。
1 研究背景及意义
通过智能导航模块,机器人可以根据程序进行前进、后退、转弯、加速、减速等一系列的动作指令。综合以上多种智能行走模式,在使用上最为安全且精确度较高的即为智能视觉识别导航技术。
机器人自身的外部防护外,其在行走中的避障功能则是其中的关键。传统的避障方法是利用压力传感器来感应到障碍物,控制中心作出相应的反应来进行避障的。但由于此方法存在局限性,因此出现了全新的激光避障方法,辅以传统避障方法使得机器人能够安全可靠地运行工作(如图1所示)。
2 智能移动系统
2.1 系统结构
完成智能移动的目标通常需要建立空间坐标系和环境模型,通过无线定位和视觉分析等方式实现机器人在空间中的定位和对环境的辨识,然后通过路径规划和导航策略完成从当前位置到目标的自主移动。如图二是智能移动系统的结构示意图:
利用CCD传感器采集到的路面信息来识别彩色的引导线,在环境信息完全未知的情况下,机器人在行走的过程中利用视觉传感器不断地对引导线进行检测,并调整行进路线与引导线的偏差。最终在引导线的指引下到达指定的目的地。
2.2 系统运动控制
运动控制系统包括机器人的行驶机构、驱动电机、运动控制器等设备,实现机器人的运动控制。机器人移动本体的后两轮为驱动轮,由两台电机分别驱动, 差速转向;前轮为万向轮, 随动。该方案结构简单,易加工,直线运动性与转弯性能好,能够以两后轮中心点做原地转弯,且无侧滑,适应性强,且便于控制系统的设计。
根据上位机指令实现机器人的前进和后退等不同动作,并对机器人的位置和速度进行实时控制。在机器人系统中,平滑、稳定的运动能够降低对机械部件的磨损,使运动连贯。
2.3 智能视觉识别导航技术系统
2.3.1 智能视觉导航引导线的介绍
智能视觉识别导航技术最终目的是让巡检机器人按照人规划的一条可根据需求,随时变更线路来行走。这条线路即为引导线。而引导线的铺设则有很多的选择。目前项目研究发现可用热熔漆铺设的,可用瓷砖铺设的,也可用胶带进行铺设的。而每一种铺设方法都有不同的特点,下面对各种铺设的方式进行比较,对比可如表1所示。
目前应用到的这几种铺设方法最后的效果都还是不错的。但尘土对于白色的引导线的影响较大。因此无论运用哪种方法对于引导线进行铺设,都要定期的对线路进行清扫和维护,才能使之发挥出引导机器人可靠进行智能视觉识别导航技术。
2.3.2 智能视觉识别导航技术的基本原理(图3)
功能原理框图列出了图像数据的流向,其中要经过四种算法的处理:图像数据先后通过图像预处理,紧接着是最优值分割二值处理,然后是二值图像形态学“开”运算处理,最后是路径定位及方向角测量。
功能原理框图的核心部分是中值滤波,中值滤波是一种非线性的空间滤波,它的相应基于图像滤波器包围的图像区域中像素的排序,然后用统计排序的中值代替中心像素的值。如图4是中值滤波前后的图形对比图:
2.3.3 智能视觉识别导航技术的关键技术
设计的标识体系以黑白色图标为主,图像识别算法基于灰度取值,综合边缘检测、模板比对等多种成熟应用的算法理论,并经最小二乘拟合数据,精确识别出当前巡线轨迹相对于车体位姿的方向及偏移,以及通过识别各种节点标识输出当前巡线机器人的定位信息和环境标志符号,结合机器人自定位模块作为运动规划及控制的参考输入。
图像识别的过程:
(1)预处理:对得到的图片进行预处理,将复杂的图像变成色彩块。
(2)色彩提取:有了色彩块,就可以对目标的颜色进行提取,进而消除大部分背景;
(3)降噪:对于提取的前景需要去除一些噪声点、块,以方便之后的识别;
(4)建模:对前景进行建模;

图1 变电站智能巡检机器人整体视图
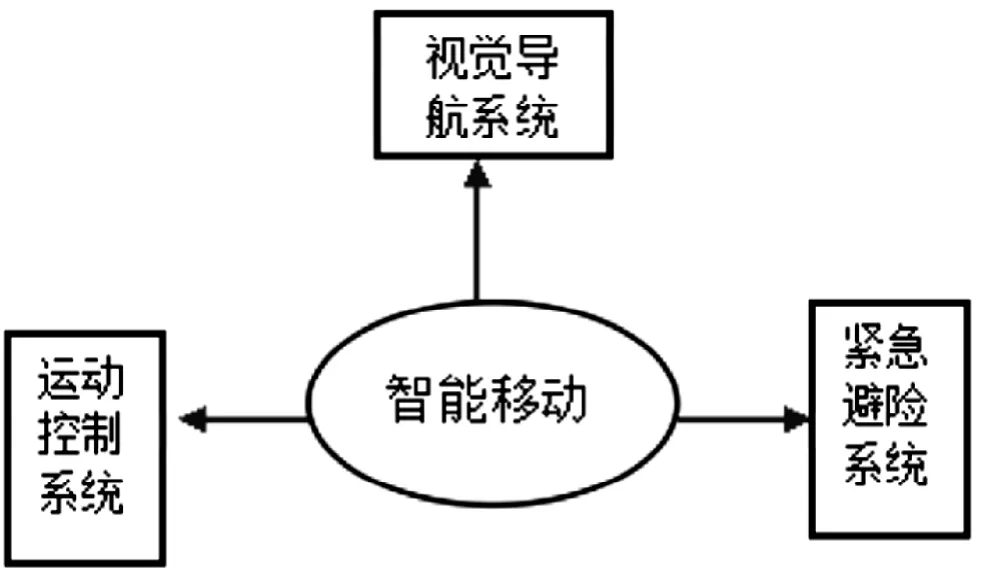
图2 智能移动系统的结构示意图
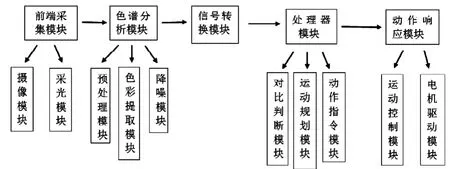
图3 智能视觉识别导航技术的原理结构示意图

图4 左侧为滤波前图形,右侧为滤波后图形

图5 压力感应避障系统结构示意图

图6 激光避险系统的通讯流程图

图7 激光避障系统的结构示意图
(5)匹配:用目标和提取的模型进行匹配。
2.3.4 智能视觉识别导航技术的优点
智能视觉识别导航技术系统是以地面上涂设的条带状路标作为路径标识符,运用计算机视觉快速识别路径,其最优导向控制器能够保证对路径进行准确跟踪。与其他导航方式相比,具有突出的优点,如表2所示:
2.3.5 智能视觉识别导航技术与其他导航的比较
智能巡检机器人的导航方式虽然有很多种,例如磁导航的应用,即在机器人的行走路径地下钉入一些磁体,机器人会通过磁性的吸引而沿着路线行走。而智能视觉识别导航技术则由于其成本低,不会受到外界的干扰,易于实施等多种功能成为目前最好的选择,对比可如表3所示:

表1 各种引导线铺设方式的比较

表2 智能视觉识别导航技术的优点
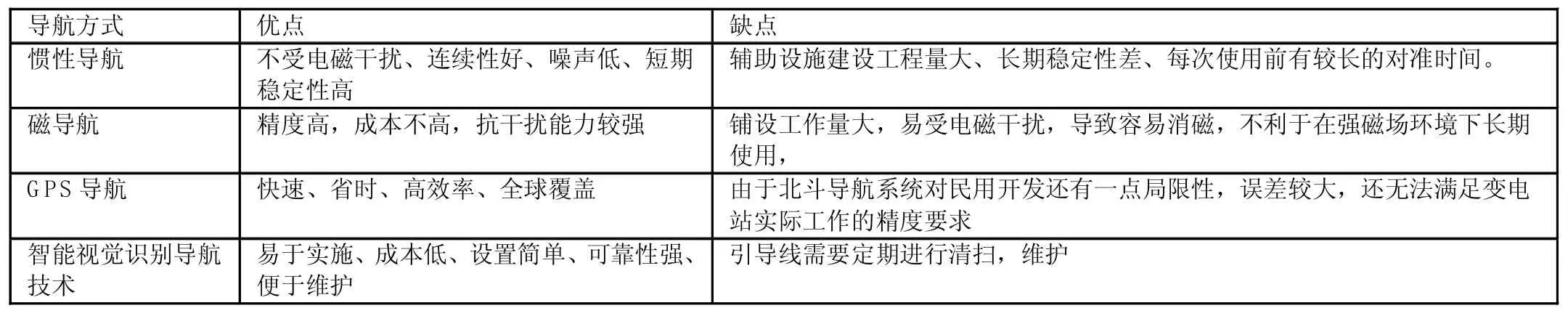
表3 各种导航的优缺点对比
3 紧急避险系统
变电站巡检机器人在利用智能视觉识别导航技术正常行走的过程中难免会遇到障碍物,或者遇到一些特殊的情况。当遇到障碍物的时候,智能机器人如果继续向前走会撞到障碍物,进而对机器人造成一定的损伤。因此,智能巡检机器人如何规避障碍物是必须要解决的问题。
3.1 压力感应避险系统
当遇到前方有障碍物的时候,障碍物会对前方的防撞条施加一个压力,压力通过防撞条经过固定条和弹簧缓冲装置到达压力传感器上,压力传感器将这个力的电信号转换成数字信号传送到处理器,处理器根据力的大小和设定的临界值进行比对,向驱动装置发出相应的信号,驱动装置则根据信号的指示做出相应的动作。继续前进,或者紧急停止等等。如图5所示为压力感应避障系统结构示意图。
然而由于压力传感器的位置相对比较固定,而有的障碍物与智能机器人发生碰撞的位置却在其他部分,存在置空式障碍物,有可能造成云台的损坏或是摄像头的故障等,使用研究发现采用激光避险系统可以很好的防范这种情况的发生。
3.2 激光避险系统
3.2.1 系统概述
此系统采用了避障用激光点阵器,它包含有激光器、电源电路、准直器、达曼光栅、反射镜、棱镜组组成,准直器、反射镜和棱镜等等,光学探头部就是由这些部件组构而成。如图6为激光避险系统的通讯流程图:
3.2.2 激光避险模块
该传感器模块对环境光线适应能力强,其具有一对红线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号,可通过电位器旋钮调节检测距离,有效距离范围2~80cm(如图7)。
通过在机器人身体的前端安装一个激光发射器,向行驶路线的前方发射激光,利用激光束扫描物体,将反射光束反射回来,得到的排布顺序不同而成像。用图像落差来反映所成的像,利用传感器将图像信号转化为数字信号传送到处理器中,处理器将得到的信息与环境模型库中的信息对比得出是否为障碍物,进而向动作响应模块发出命令,动作响应模块根据得到的命令指示完成相应的前进或者急停等动作。
4 结语
变电站智能巡检机器人在其多个功能系统的配合下能够很好的完成代替人工巡检的目标,其中的智能移动系统则又是其中的一个关键因素。既保障了变电站设备的正常安全运行,又为人工省去了很多麻烦。此外,其本身还是有一些缺点的。在这个技术逐渐得到应用的同时,也应该继续研究新的更加高效的技术。总之,对于变电站智能巡检机器人智能移动的研究将会促进其发展,使之更好的服务于变电站巡检工作之中。
[1]刘海涛,关胜晓,秦亮,王若.智能机器人智能视觉识别导航技术系统的研究[J].计算机应用与软件,2010年12期.
[2]林琳.机器人双目视觉定位技术研究[D].河南大学硕士学位论文,2007.
[3]隋婧,金伟其.双目立体视觉技术的实现及其进展[J].电子技术应用,2004.
[4]段建东,张保会,周艺.超高速暂态方向继电器的研究[J].中国电机工程学院.
[5]张亚军.有限状态设备的移动监视与识别方法的研究[D].浙江理工大学,2010年.
Currently, for some small or high-voltage substations unattended, the extensive application of intelligent substation inspection robot is being progressively realized.The level of intelligent mobile robot model is its level of reliable and efficient operation of the key. Therefore, this paper its smart mobile conducted in-depth research. Intelligent mobile robot walking is needed to navigate through the way its guidance navigation and positioning, and the replacement of the development of this navigation, but also established the current upgrade continuously develop intelligent visual recognition navigation technology, and their walking in the navigation process corresponding studies consequential correlation function smart tight barrier to illustrate the importance of developing and improving intelligent mobile robot running for work. Smart move by raising the level of technology, will make the substation inspection robot working efficiency greatly improved, increasing its safety and reliability during operation so that it can be more efficient and secure service to work among the substation inspection
Intelligent substation inspection robot Smart Move mode Intelligent visual recognition navigation technology Intelligent obstacle avoidance
毛健 (1971—),男,本科,研究方向为电力系统电力系统调度运行;王忠扬(1980—),男,大专,研究方向为电力系统变电运行、检修、管理等;袁发强(1977—),男,本科,研究方向为电力系统继电保护及自动化;李肃(1975—),男,本科,研究方向为电力系统高电压绝缘及试验技术;吕政扬(1967—),男,本科,研究方向为电力系统输电设备应用研究等;许毅:(1987—),男,本科,研究方向为智能机械自动化设计及应用等。
