一种蜘蛛式微型起重机安全监管系统的研究
2015-11-04刘贺明陈晓峰
刘贺明,陈晓峰,郑 旭
(中国建筑科学研究院 建筑机械化研究分院,河北 廊坊 065000)
一种蜘蛛式微型起重机安全监管系统的研究
刘贺明,陈晓峰,郑 旭
(中国建筑科学研究院 建筑机械化研究分院,河北 廊坊 065000)
介绍了自主研发的蜘蛛式微型起重机安全监管系统,起重机工作参数可通过人机界面显示,使操作者能直观全方面地了解起重机的工作状态,避免误操作和超载;
蜘蛛式微型起重机;安全监管系统;人机界面
蜘蛛式微型起重机具有体型小巧、通过能力强、自重轻、起重能力大、作业安全的特点,可以通过自身的行走机构、大载重电梯等运载工具方便进入建筑物内部或狭小空间完成起重作业任务,本文针对其电瓶供电、液压控制、动态起重特性等工作特点,量身研发出一种可对其全面安全监管的系统。
1 监管系统的组成
如图1所示,本系统由主机、人机界面、倾斜传感器、臂角传感器、臂头滑轮传感器、起升传感器及继电器输出板等7个部分组成。
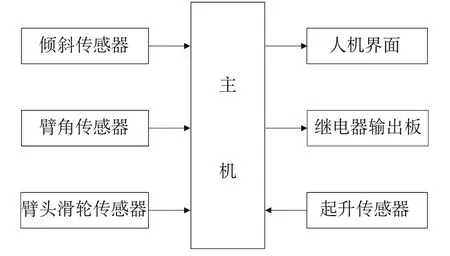
图1 监管系统组成
2 各部件功能介绍
1)主机采用ARM开发平台,主频率为100MHz,提高系统运算速度,程序嵌入实时操作系统,提高系统的稳定性,它是整个系统的大脑,通过CAN总线接收各个传感器采集的信息运算处理后,通过232总线发送给人机界面显示,通过CAN总线发送命令给继电器输出板。
2)人机界面采用8寸电阻式触摸屏(如图2所示),负责录入起重机参数、初始数据标定及实时显示起重机工作参数。
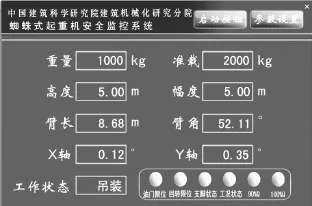
图2 人机界面
3)倾斜传感器采用高精度双轴倾角SCA100T芯片,实时采集X、Y轴方向倾角。臂角传感器采用高精度单轴倾角SCA61T芯片,实时采集大臂仰角。臂头滑轮传感器负责采集吊钩吊载重量及臂头滑轮转动角度,重量采集部分由应变式重量传感器、自跟踪式电桥电源及高精度AD芯片组成,臂头滑轮转动角度部分采用霍尔元件。起升传感器采用霍尔元件实时计算起升卷筒的转动角度。以上传感器获得的数据均通过CAN总线发送给主机。
4)继电器输出板负责接收并执行主机命令,自动切断设备往危险方向动作的液压阀,避免事故发生。
3 高度及伸缩臂长计算方法
3.1 臂长的计算
已知起升卷筒直径D1,臂头滑轮的卷绕直径D2,伸缩臂初始长度L0,通过起升传感器测量的起升卷筒的转动角度θ1,通过计算公式:S1=θ1πD1/360得到起升卷筒输出的起升钢丝绳长度S1;根据臂头滑轮转角传感器测量的臂头滑轮的转动角度θ2,通过计算公式:S2=θ2πD2/360得到臂头滑轮输出的起升钢丝绳长度S2,那么当前伸缩臂实际长度L=L0+(S1-S2),完成伸缩臂臂长的计算。
3.2 高度的计算
已知标定的初始高度H0,臂长L,吊钩为2倍率,通过臂角传感器计算当前的臂角为θ,通过计算公式:Hdb=Lsin(θ)得到大臂动作实现高度变化的值,根据臂头滑轮转角传感器测量的臂头滑轮的转动角度θ2,通过计算公式H1=θ2πD2/(360×2)得到起升卷筒实现高度变化的值,当前高度H= H0+Hdb-H1。
4 动态起重特性下限载功能
蜘蛛式微型起重机根据支腿伸出位置不同,共有3种吊载工况,而每种工况又根据伸出臂长的不同分成6种起重性能表,最大吊载工况下的6种起重性能如表1所示。
系统采用以下方法解决了动态起重特性下实现限载功能。
如图3所示,通过触摸屏将18组起重特性曲线输入,主机将输入参数保存到片外掉电保存存储器中。主机通过输入检测确定当前支腿所处工况(表2),再根据当前大臂伸缩长度,便可从输入的18条起重特性中,找出当前所处起重特性参数,将此条起重特性参数带入一元五次方程中,分别计算出相应的系数,再将当前的幅度值带入此一元五次方程进行反求解,便可得到当前状态下准载值Q,根据公式:Qb=Q0/Q,Qb为当前的载重比,Q0为当前吊钩的吊载值,Q为当前的准载值,当Qb大于90%时,监控开始预警,当Qb大于等于100%时,监控开始报警并禁止设备往危险方向动作。
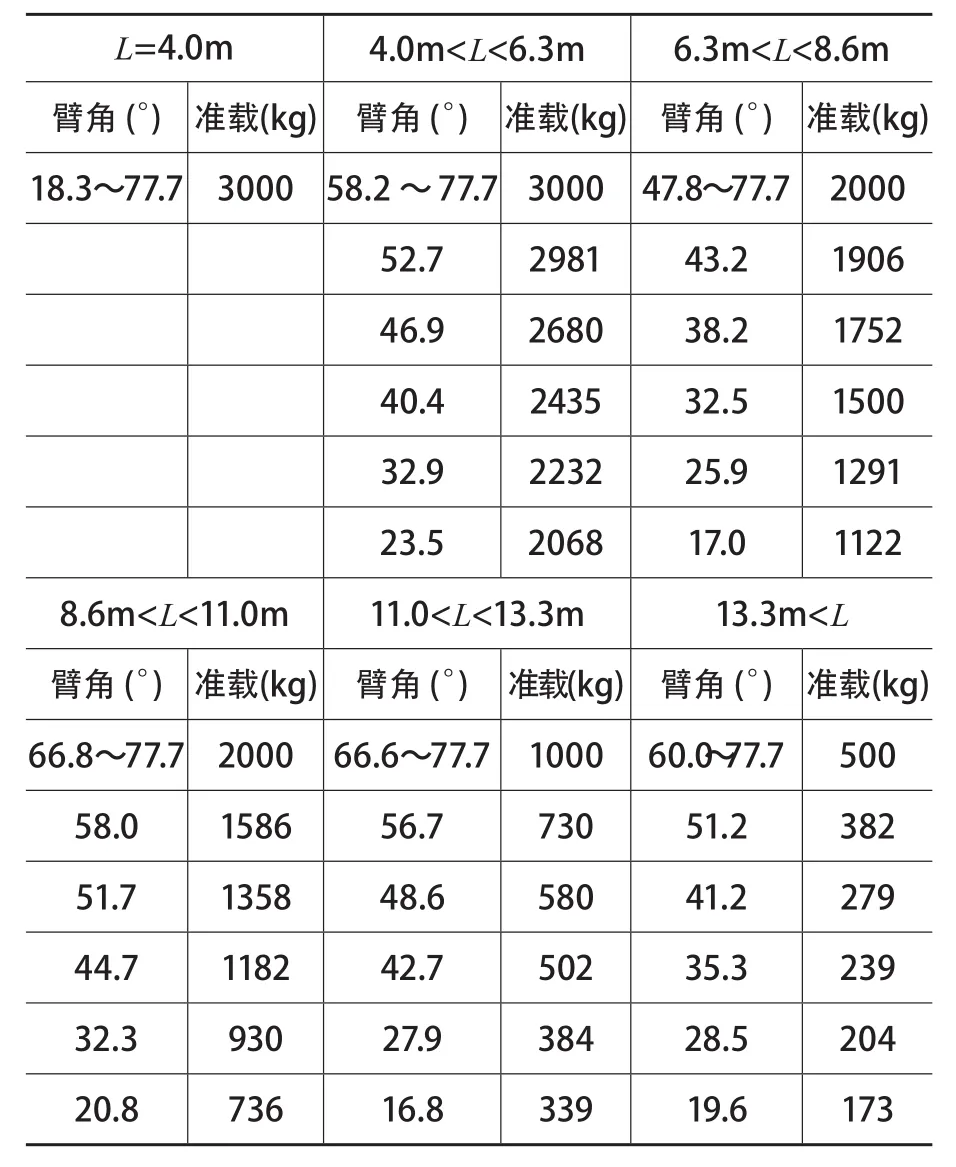
表1 起重性能表
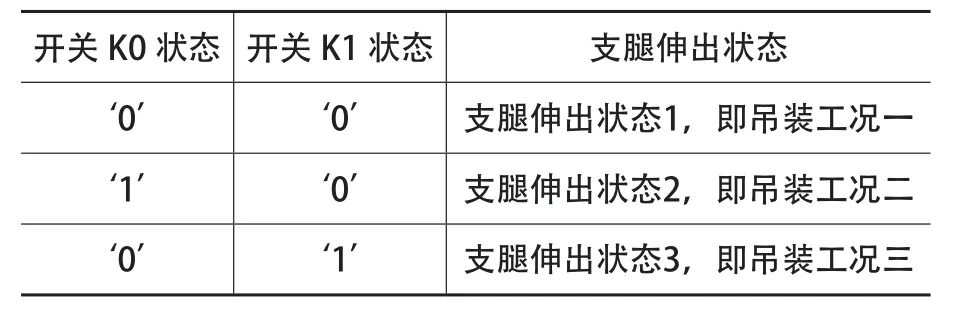
表2 检测支腿工况
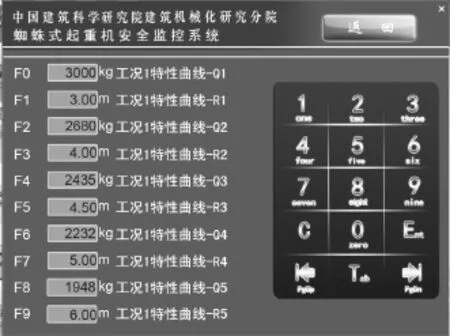
图3 输入起重特性曲线
5 结 语
本文介绍的蜘蛛式微型起重机安全监控系统,通过现场实际应用,能及时准确的计算出高度、幅度、臂长、倾斜、当前载重、载重比等工作参数,有效扼制设备超载运行,同时将起重机工作参数通过人机界面展示给使操作者,为设备的使用提供了安全保证。
(编辑 贾泽辉)
Study on the safety supervision system of a spider type micro crane
LIU He-ming, CHEN Xiao-feng, ZHENG Xu
国家“十二五”科技支撑计划项目(2011BAJ02B04)
TH213.1
B
1001-1366(2015)08-0050-03
2015-06-15
