基于DSP-FPGA的永磁电机数字控制系统设计*
2015-11-03洪剑锋宋凤林黄劭刚
洪剑锋,宋凤林,黄劭刚
(南昌大学信息工程学院,南昌 330031)
基于DSP-FPGA的永磁电机数字控制系统设计*
洪剑锋,宋凤林,黄劭刚
(南昌大学信息工程学院,南昌 330031)
以交流永磁电机矢量控制原理为基础,介绍了一种基于DSP-FPGA的永磁电机数字控制系统的设计,完成了数字控制系统的总体架构及相应的硬件、软件设计,同时为了提高控制系统的动态性能,采用了基于CORDIC变换的旋转变压器解码算法得到转角正余弦函数值与转速信息,且DSP与FPGA之间采用高速同步串行通信SPI来实现。在对总体设计分析的基础上,通过计算机软件仿真和对实际永磁电机的控制实验结果表明,所设计的数字控制系统具有结构简单、较好的动静态特性与快速性能,在实际应用中具有较好的应用前景。
永磁电机;DSP-FPGA;矢量控制;CORDIC旋变解码
0 引言
永磁同步电机具有体积小、重量轻、高效率、高输出转矩、高功率密度等优点。因此,在工业生产和交流伺服控制领域得到了广泛应用[1]。
目前对永磁电机的控制技术主要有磁场定向矢量控制技术与直接转矩控制技术,直接转矩控制是在定子静止坐标系中针对电动机定子磁链和转矩实施独立控制,通过在适当的时刻选择合适的空间电压矢量来实现两者近似解耦的控制效果[1]。而矢量控制技术[2]的核心是在转子磁场坐标系中对磁场电流id和转矩电流iq分别进行控制,其控制性能可与直流电机相媲美。传统的DSP控制方案可以满足算法结构复杂、运算速度高等的需求[2],但是对运算结构相对比较简单的底层信号处理算法来说显不出优点,适合采用FPGA硬件来实现[3]。本文正是充分利用两者的优势,将其集成在同一控制系统当中,其最大的优点是结构灵活,通用性强,运算速度高等。传统旋转变压器的解码都是由专用芯片[4]来完成,其过程复杂费时,本文采用基于CORDIC变换的旋变解码算法来得到转角正余弦函数值和转速信号,且其完全由FPGA纯硬件来完成,提高了实时性。DSP与FPGA之间采用高速同步串行通讯SPI来实现,SPI通讯协议简单,连线少,且能全双工通信。最后以TI公司的芯片TMS320F2812与ALTERA公司的CYCLONE IV系列FPGA芯片EP4CE6F17C8为核心控制板,通过仿真软件和对实际永磁电机的控制实验结果表明,该控制系统具有可行性与准确性,且动静态性能和控制效果好,在实际应用中具有较好的应用前景和参考价值。
1 交流永磁同步电机矢量控制原理
矢量控制理论[1]的基本思想是将定子三相交流电经过坐标变化和磁场定向,分解为磁场分量和转矩分量并分别对其控制,从而达到了磁链与转矩的解耦控制。图1是永磁同步电机矢量控制原理图。采用旋转变压器得到转角的正余弦函数值和转速值构成矢量闭环控制。
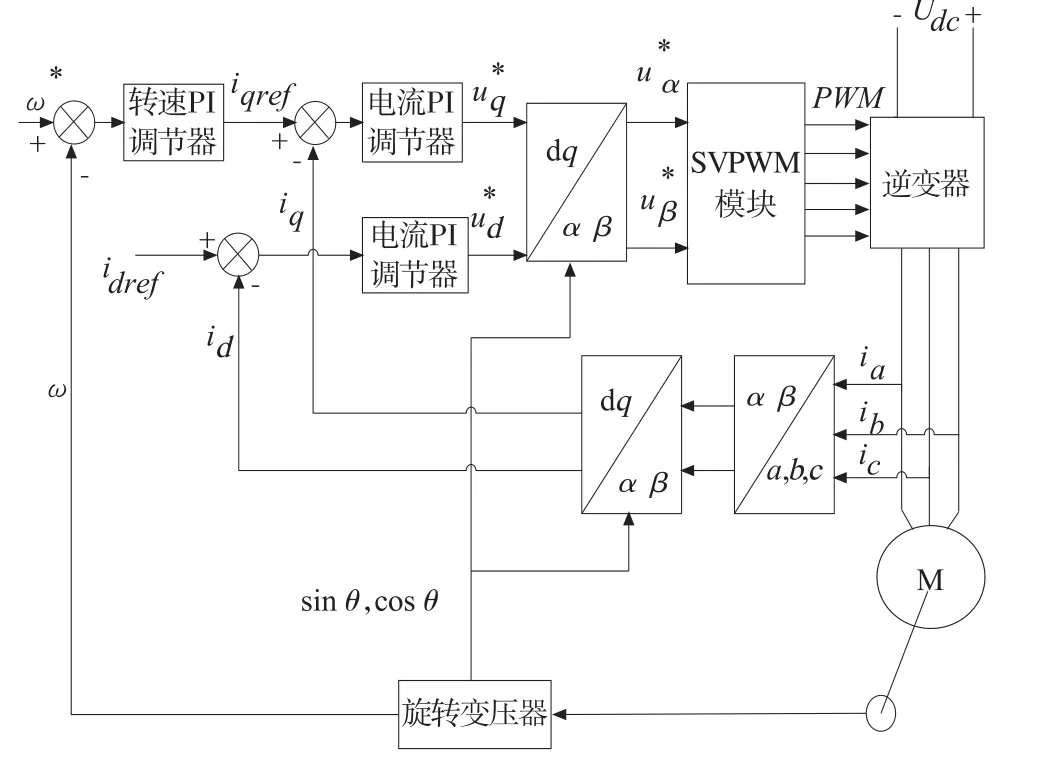
图1 交流永磁同步电机矢量控制系统框图
永磁同步电机在转子坐标系下的转矩方程为:
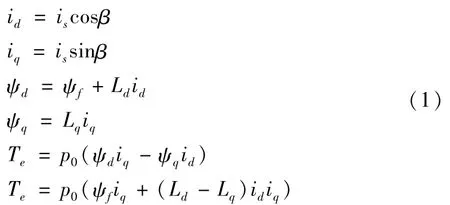
式中:is为定子电流,id,iq为定子电流dq轴分量,ψd,ψq为dq轴磁链,Ld,Lq为dq轴同步电感,ψf为永磁磁链,p0为磁极对数,β为转矩角。
从电磁转矩方程可得其分为两部分,其一为永磁体产生的励磁转矩;其二为转子凸极结构产生磁阻转矩。它们都与定子电流的q轴分量成正比,即只要控制电流转矩分量iq就可以控制转矩的大小。
2 控制系统的硬件设计
整个矢量控制系统是以DSP-FPGA为核心,其硬件设计主要包括:主回路设计,控制回路设计,检测电路设计。为了达到对电机的精确控制和充分利用DSPFPGA芯片的特长,将闭环矢量控制算法、计算PWM脉宽等复杂功能由DSP芯片来完成[5],将电机各种故障检测、计算转速转角值及PWM反相与死区设置等功能由FPGA芯片完成。采用CORDIC算法的旋变解码过程由FPGA纯硬件来完成,得到转角正余弦函数值和转速信号,DSP与FPGA之间采用高速同步串行通讯SPI来实现。
2.1 主回路设计
主电路由整流电路、滤波电路、逆变电路、启动和制动电路组成,如图2所示。整流电路由6个二极管组成三相桥式整流电路,其型号为DFA100BA160,其不具有可控性和逆变能量回馈性能。CS4为整流桥吸收电容,容量为0.22μF/1200V。逆变电路由6个IGBT组成,其型号为FF150R12RT4,其是电压型逆变电路,可通过PWM控制将直流逆变为三相正弦波电压。启动电路是由一个可控硅SCR和一个充电电阻Rs并联组成,为了防止开启变频器时电容充电产生过电流。制动电路由一个IGBT模块T1和制动电阻组成,为了将电机制动时产生的电能释放到制动电阻上。C表示带有均压电阻的电解电容的滤波模块。
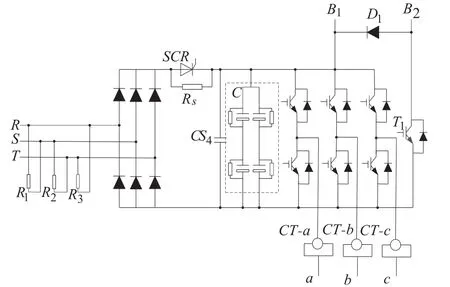
图2 主回路设计框图
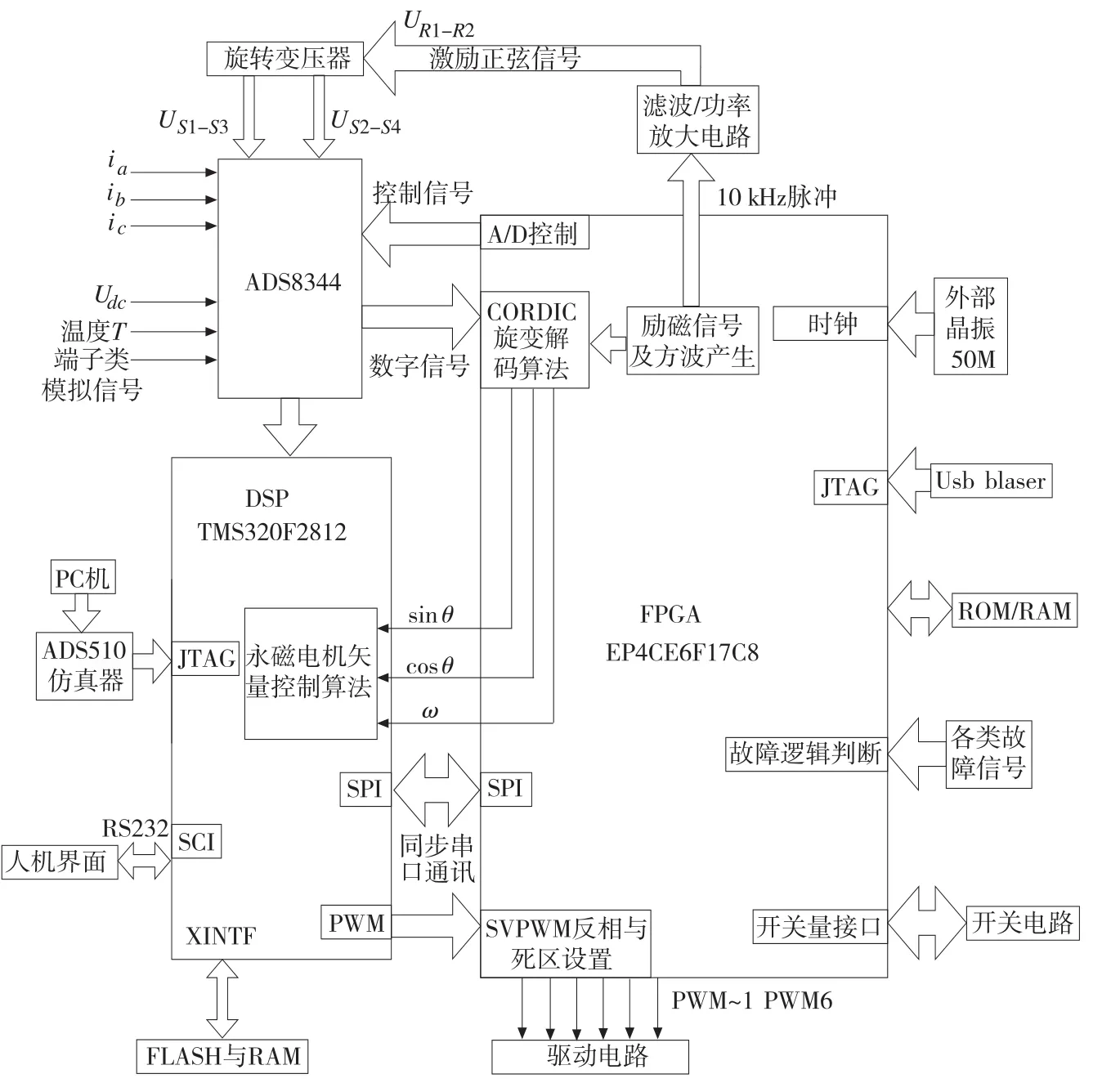
图3 控制回路设计框图
2.2 控制回路设计
永磁电机矢量数字控制系统的控制回路以DSPFPGA芯片为核心,其中DSP主要完成矢量控制复杂算法、利用事件管理器计算PWM脉宽与网络通讯包括SCI和SPI等功能,PFGA主要完成A/D转换控制信号、CORDIC旋变解码算法实现,各类故障保护判断处理、IGBT脉冲触发信号反相与死区时间设定等功能[6]。如图3所示,由FPGA产生10kHz的方波信号,经过滤波/功率放大电路得到旋转变压器的输入正弦信号UR1-R2,其输出信号US1-S3、US2-S2中含有转子的位置信息,经A/D转换后送入到FPGA中进行解码,解码得到转角正余弦值与转速值送入DSP闭环控制。模数转换芯片采用TI公司生产的ADS8344,其是一款高速、低功耗、16位逐次逼近型,最大采样速率为100kHz芯片。其中需要模数转换的信号包括三相电流信号、母线电压、系统运行温度和端子口输入的模拟信号。由于在永磁电机矢量数字控制系统中,定子电流和母线电压的检测精度和实时性关系到整个控制系统性能。为此,本系统选用型号为CSCA0100A000B15B01的霍尔电流传感器来检测电流,它的线性度、动态性能和抗干扰能力要强于一般的传感器。核心控制芯片还包括其他的相对简单的外围设备,如时钟、JTAG下载口、外扩FLASH与RAM等,下文着重介绍CORDIC旋变解码算法的FPGA纯硬件实现,DSP与FPGA之间的SPI数据通讯实现与DSP算法现实的软件设计。
2.3 CORDIC旋变解码算法的设计
设旋转变压器原边输入正弦电压为:

则副边绕组感应输出电压为:

式中:E0为励磁电压幅值;Um为副边绕组感应输出电压向量的模;ω为励磁电压角频率;k为旋转变压器变比;θ为转子旋转角度。
Um的大小可以通过输出电压的两个分量的合成求得,其正负方向取决于原边输入电压的方向,即为输入信号的同步方波d:

转角的正余弦函数值为:
其中d为输入电压信号的同步方波信号:

转子转角θ的正弦和余弦函数可以看成以1为模的空间旋转矢量,其转速为:

将上式化为差分格式为:

所以旋转变压器解码算法的信号处理过程如下图4所示。
CORDIC算法迭代模式有三种,三种模式[7]可以用统一的表达式(9)来表示;

图4 旋变解码过程
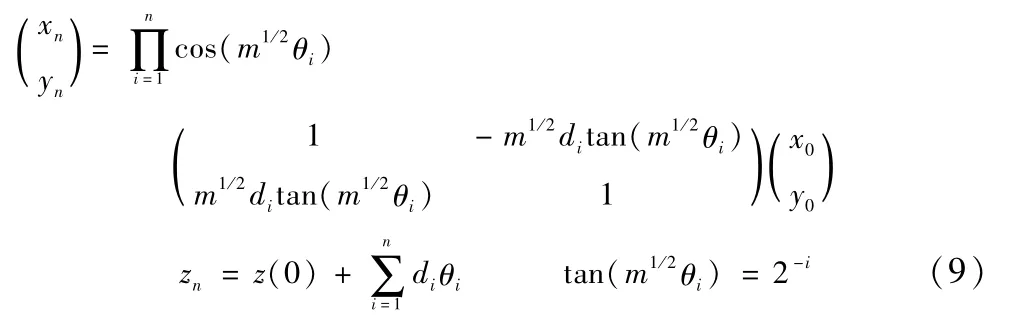
式中i为旋转的次数,为旋转角度累加,di为旋转方向,di=-1表示顺时针旋转,di=1表示逆时针旋转。当m=1为圆周旋转模式,m=0或-1分别是线性旋转和双曲旋转模式。针对输入向量的不同,di有两种表达:

本文采用圆周旋转模式的直角向量方式进行迭代运算,其解码的初始条件为:

迭代算法的表达式为:

经过n次迭代后,y趋近于零,旋转变压器副边绕组感应输出电压向量的模可以由下式得到:

其中 kn为伸缩因子[7]如下式(14)计算,其值为0.6037。

具体实际到硬件电路中用以下移位实现:

如图5为正余弦值算法结构图,图6为用Verilog语言[8]编写经Quartus II软件综合后的旋变解码的RTL视图。
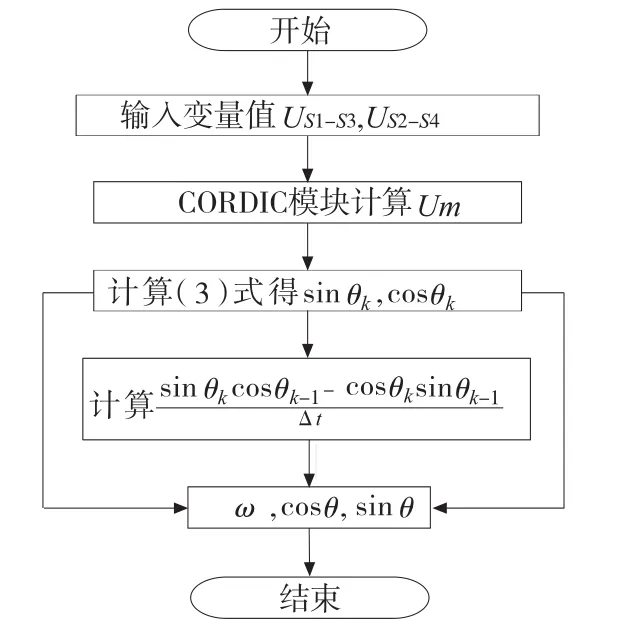
图5 正余弦值和转速算法结构

图6 模块的RTL视图
2.4 DSP与FPGA间SPI数据通讯设计
SPI数据通信协议简单,连线少,且是全双工的通讯方式,只需要4根线:clk同步时钟信号、mosi主端输出/从端输入数据信号、miso主端输入/从端输出数据信号、cs从端片选段,SPI数据通信的同步串行传输顺序是高位先传、低位后传。根据开始数据采样的边沿及时钟的空闲状态不同,SPI通信可分为4中模式[9],本文采用模式0进行通信,即在未通信是clk为低电平,当片选信号下降沿有效时且为时钟信号的下降沿时发送数据,在时钟信号的上升沿接收数据。在本控制系中,将FPGA设置为SPI通信的主模块,DSP为从模块,如图7所示,SPI通信主模块FPGA实现图。
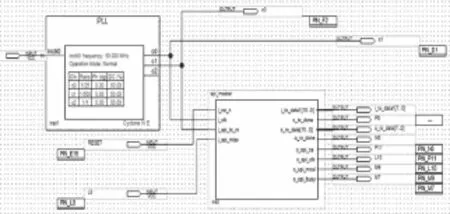
图7 SPI通讯FPGA设计
3 软件设计
整个控制系统的软件设计包括DSP控制软件和FPGA控制软件两部分组成,由于DSP是系统主控单元,这里着重介绍DSP子系统的软件设计。DSP程序设计总体上分为初始化程序、功能模块程序与中断服务程序3部分组成。初始化程序包括DSP硬件与软件变量的初始化,主要在主程序中完成,如图8所示。功能模块包括人机界面与SPI通信,中断服务程序包括PWM中断子程序和SPI通信中断子程序,PWM中断子程序是实现矢量控制的核心程序,其包括坐标变换、电流采样、转速数据更新、磁链观测与SVPWM信号产生等功能,具体的程序流程如图9所示。
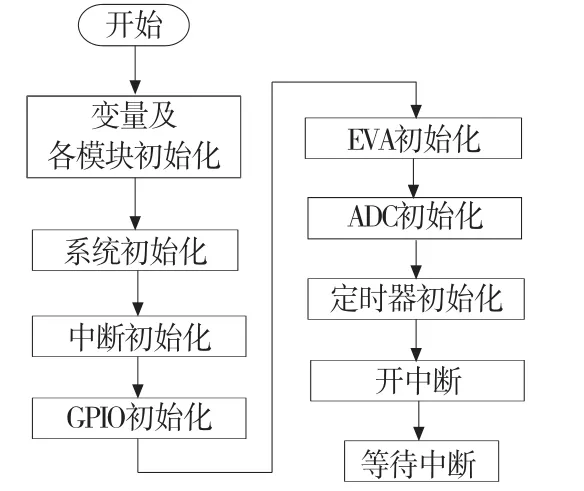
图8 主程序流程图
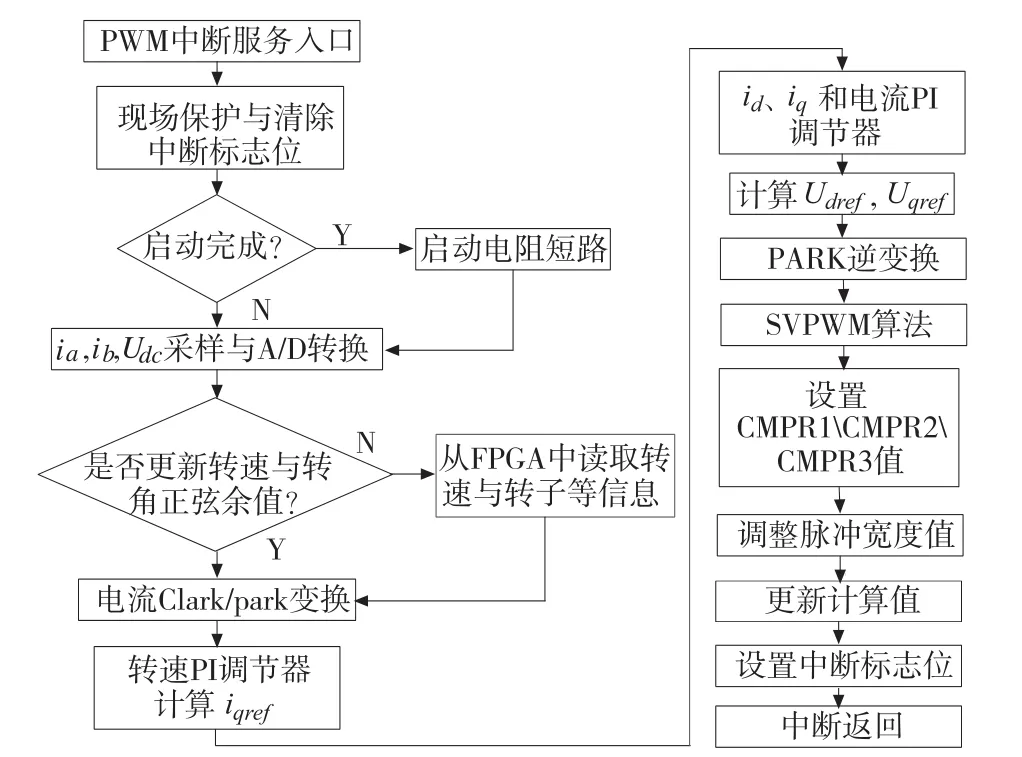
图9 PWM中断服务程序
4 实验结果
本文采用TI公司的DSP芯片TMS320F2812和ALTERA公司的CYCLONE IV系列FPGA芯片EP4CE6F17C8为核心控制板,采用模块化编程设计思路,基于CORDIC变换的旋变解码算法的Modelsim仿真波形如图10所示,图10包含旋转变压器的输入信号、同步方波处理信号与解码后输出的转角正余弦值等信号。接着在一台永磁电动机上进行实验,电机相关参数如下:额定功率Pn=22kW,额定电压Un= 90V,额定频率fn=150Hz,定子阻值Rs=0.121Ω,d轴电感Ls=0.0965mH,q轴电感Lq=0.2804mH,极数P=6。图11是DSP与FPGA进行SPI通信是的片选cs和clk时钟信号,其表明控制系统通信成功。图12是A相与B相的SVPWM波形和线电压SVPWM波形,证明该控制系统设计的合理性与准确性。
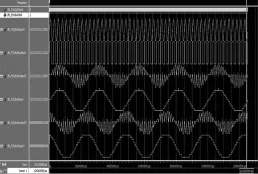
图10 CORDIC旋变解码的输入输出及同步方波处理信号
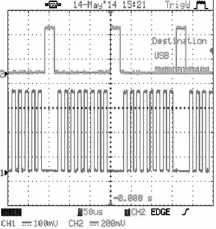
图11 SPI通讯片选与时钟信号

图12 AB相及线电压SVPW波
5 结论
本文以DSP-FPGA为核心构建的交流永磁电机矢量数字控制系统,并且采用CORDIC变换对旋转变压器进行解码运算得到转角正余弦函数值与转速信息,控制板之间采用SPI同步串行通信来实现。DSP与FPGA既相互协调又完成各自独立的功能。通过仿真结果与实际对一台永磁同步电动机实验表明,该控制系统设计合理,稳定可靠,具有硬件结构简单集成度高的优点,是一种理想的矢量数字控制实现方案,可以广泛应用于以交流永磁电机为驱动装置的电气传动中。
[1]袁登科,淘生桂.交流永磁电机变频调速系统[M].北京:机械工业出版社,2011.
[2]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2012.
[3]戴逸民.DSP+FPGA数字硬件系统设计与实现[J].世界电子元器件,2002(4):46-47.
[4]石卡,张二攀.基于AU6802N1的旋转变压器接口电路的设计[J].伺服控制,2010(6):59-60.
[5]Yin Yonglei,Li Yonggang,Fu Chao,et al.Study of PMSM Digital Servo System Based on DSP and CPLD[J].Electrical Machines and Systems,Proceedings of the Eighth International Conference ICEMS 2005:1554-1558.
[6]孙大南,李哲峰,王少林,等.基于DSP-FPGA全数字控制的矢量控制系统[J].电力电子技术,2008,42(11):26-27.
[7]宋晓梅,朱辉,王文静.基于CORDIC的旋转变压器解码算法的研究[J].电子测量技术,2010,33(6):39-43.
[8]刘福奇.Verilog HDL设计与实战[M].北京:北京航空航天大学出版,2012.
[9]苏奎峰,蔡昭权.TMS320X281XDSP应用系统设计[M].北京:北京航空航天大学出版社,2008.
(编辑 赵蓉)
Design of Digital Control System of Permanent Magnet Motor Based on DSP-FPGA
HONG Jian-feng,SONG Feng-lin,HUANG Shao-gang
(School of Information Engineering,Nanchang University,Nanchang 330031,China)
This paper presents the design of digital control system of permanent magnet motor based on DSPFPGA and permanent magnet motor FOC principles.It completes the overall structure and the design of corresponding hardware and software of digital control system.In order to improve the dynamic performance of the control system,This paper uses resolver decoding algorithm based on CORDIC to obtain angle cosine and sine value and speed information,And uses high-speed synchronous serial communication SPI between DSP and FPGA.Basis on the of the overall design and analysis,simulation by computer software and control experimental on actual permanent magnet motor results shows that the digital control system has a simple designed structure,better dynamic and static performance.Therefore,this control system has good prospect in practical applications.
permanent magnet motor;DSP-FPGA;field orientation control;CORDIC resolver decoding
TH166;TG506
A
1001-2265(2015)06-0096-05 DOI:10.13462/j.cnki.mmtamt.2015.06.027
2014-08-27
江西省研究生创新专项资金资助(YC2013-S059)
洪剑锋(1988—),男,南昌人,南昌大学硕士研究生,研究方向为电机及其控制,(E-mail)381613123@qq.com。
