桁架机器人检测实验台研究*
2015-11-03李进冬
李进冬,武 滢
(1.沈阳机床股份有限公司沈一车床厂,沈阳 110142;2.沈阳机床(集团)有限责任公司国家重点实验室,沈阳 110142)
桁架机器人检测实验台研究*
李进冬1,武 滢2
(1.沈阳机床股份有限公司沈一车床厂,沈阳 110142;2.沈阳机床(集团)有限责任公司国家重点实验室,沈阳 110142)
近几年来,国内外的桁架机器人产品发展特别迅速,其结构形式、控制形式、性能指标也各不相同,急需一款实验台对不同种类的桁架产品进行标定。为满足以上需求,研发了桁架机器人产品的综合测试实验台,该实验台可完成桁架产品的定位精度、速度参数、负载能力和综合定位指标等参数测试。该实验台为桁架机器人产品的性能测试提供了平台,同时对该类产品进行综合评定,并对桁架机器人产品在改进升级中提供数据支持和参考依据。
桁架机器人;实验台;综合性能测试
0 引言
随着我国机械行业的迅速发展,企业对机械设备的加工精度和效率要求越来越高。同时,近年来人力成本越来越高,造成很多机械加工行业均出现了用工招工难题。引进可实现自动化加工的生产设备,成为机械行业的普遍共识。而桁架机器人产品,因其在性价比和可维护方面的优势,成为大多数企业首选的加工自动线产品。
国内能提供桁架机器人产品的企业很多,有专门从事自动线产品公司,也有从事数控机床生产制造的公司,所提供的桁架机器人产品在结构形式、驱动形式、性能指标、控制器方式都有很大差异。因此,设计一款涵盖不同种形式的桁架机器人产品的实验台,可对不同产品进行主要性能参数进行测试的实验平台,有利于对该类产品进行综合评定,并对该类产品在设计改进中提出有建设性的参考依据。
1 桁架机器人产品的结构形式
1.1 桁架主体形式

图1 三立柱形式桁架主体
当前,国内外主要桁架主体构成形式各不相同[1-3],但大体上分为三立柱形式桁架主体(见图1)和双悬臂形式桁架主体(见图2)。其中三立柱形式通用性更强,更易于扩展为多台设备组线,双悬臂形式近几年来在国内应用很多,更适于两台机床的成线布局形式,其占地面积更小、安装调试更简单,而且其性价比更高。

图2 双悬臂形式桁架主体
1.2 抓手形式不同
为提高桁架机器人产品的工作效率,抓手形式通常为双抓手结构。但根据所拟定抓取工件的形状、重量、尺寸不同,抓手形式也不同。因各生产厂家设计思想和配套设备特点的不同,抓手形式也各异,以应用最广的标准盘类工件抓手为例,主要包括以下几种形式,如图3所示。主要是抓手模块的旋转形式不同,可分为集成型旋转头式(图3a)、标准气缸式(图3b)以及电机驱动式(图3c)等形式。
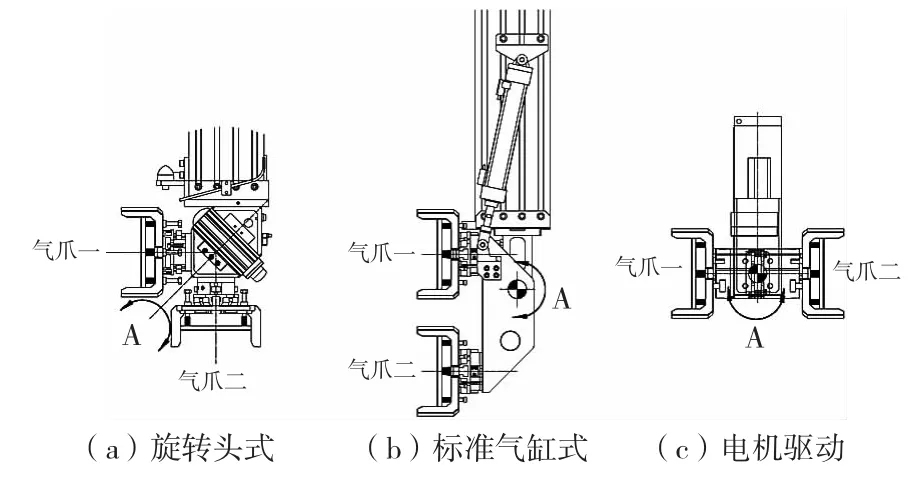
图3 抓手结构图
1.3 控制形式不同
常用桁架机器人产品的控制形式也多种多样,具体形式有基于PLC的控制、专用桁架控制器等形式。控制系统不同,对桁架机器人产品的定位精度指标、速度与加速度指标及操作方便性等方面,均有较大的差异。
最简单的控制形式是PLC控制形式,其优点是性价比较高,主要缺点是控制形式相对单一,对于多套上下料程序的程序切换适应能力较差。一般的专用桁架控制器的操作形式接近工业机器人控制器,一般均有示教功能,对于多套不同程序可方便切换。部分桁架控制器具有与机床控制系统类似功能,可实现对控制轴精度的补偿功能和对控制速度与加速度的优化功能,提高设备的速度和定位等参数指标。
2 桁架实验台功能设计
针对桁架机器人产品的结构形式、抓手形式与控制形式的不同,进行桁架实验台设计,对常用桁架的常见性能指标和参数要求[4-5]进行测试与评价,最终提供一套测试结果,作为桁架产品性能指标的评定标准。
2.1 测试主要参数指标
以应用较多的拾取端提取重量为50kg的两轴桁架机器人产品为例[6-7],其主要参数指标见表1。
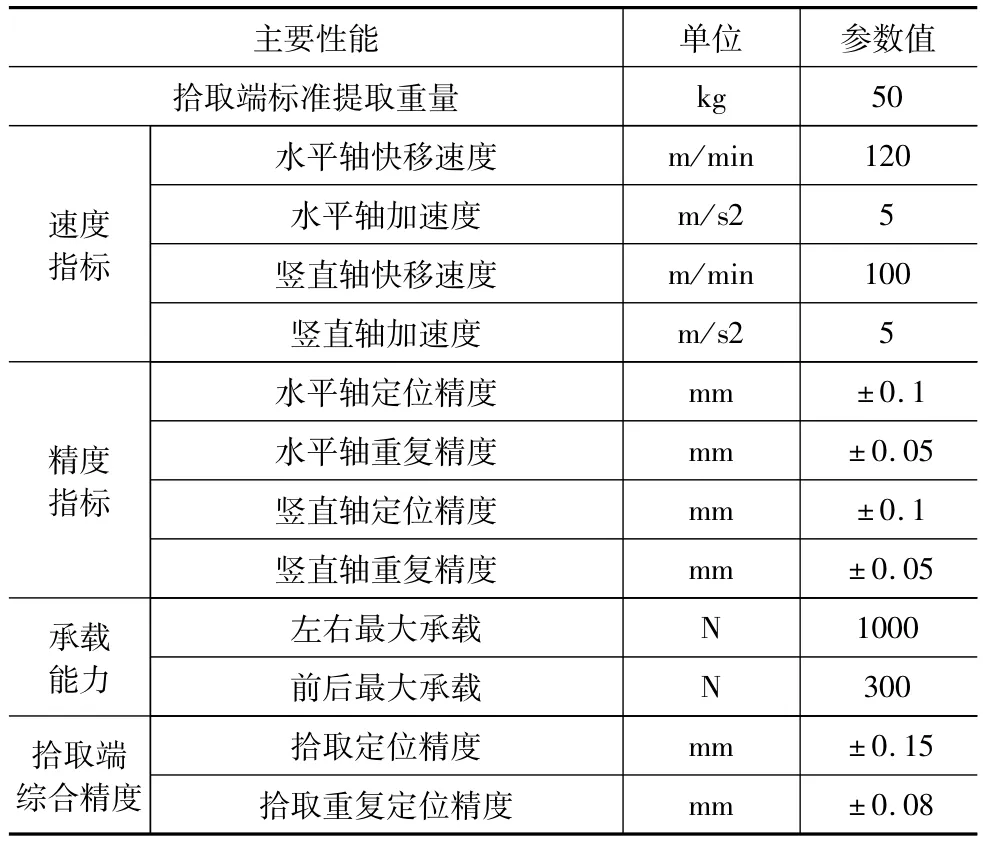
表1 桁架系统主要参数指标
2.2 实验台测试项目及方法
根据桁架机器人产品的主要参数进行实验项目的设计及测试,主要分为4个项目,分别为两轴速度指标项目测试与方法、两轴定位指标项目测试与方法、拾取端承载指标项目测试与方法和综合定位指标项目测试与方法。各项目主要实施项目及方法如下。
2.2.1 速度指标项目测试
内容:测试两轴高速伺服进给系统加减速特性,为桁架的高速伺服进给系统性能评价和优化提供实验数据支撑。
设备:笔记本电脑及IBN-TOOL软件等;
测试方法:先使用网线使笔记本电脑和CNC系统有效通讯,再运行笔记本电脑上的IBN-TOOL软件。通过IBN-TOOL软件的“伺服跟踪”功能,对不同速度给定值和速度实际值进行对比测试。然后在CNC系统中编写NC程序,使伺服轴以不同速度进行直线往复运动。在伺服轴运动同时,IBN-TOOL软件可自动记录速度给定值和速度实际值[8]。进而通过对速度曲线进行分析,就可以得到加速度相关参数的数据和曲线。这样就可以获得所测试桁架机器人产品的速度和加速度特性,提供桁架性能指标的评定结果。
2.2.2 定位指标项目测试
内容:测量两轴进给系统的定位精度、重复定位精度。
仪器:激光干涉仪,分光镜,反射镜,水平仪,高度支撑平台等。
测试方法:用激光干涉仪及相关镜组进行测量,分别对桁架的两轴进给结构进行多次测量。其中由于桁架的水平轴的高度较高,需借助高度支撑平台来进行水平轴相关精度的测试。
2.2.3 拾取端承载指标测试
内容:拾取端承载指标,主要测量机械传动链各方向的静刚度。
仪器:液压缸加载系统、拉压力传感器、数据处理与显示系统、百分表。
测试方法:通过液压加载的方式,对桁架机器人产品的拾取端的两个方向(前后、左右),按不同的施加载荷数值进行加载,得到不同方向的变形曲线图。以此判定桁架机器人产品的刚性特性[9]。
2.2.4 综合定位指标项目测试
内容:测量拾取端抓手模块的综合定位精度、重复定位精度。
仪器:工业摄相机、数据处理软件、显示单元、标准测试样件等。
测试方法:用工业摄相机及数据处理和显示单元[10],对抓手模块中抓取标准测试样件进行测量(测试样件中心有高精度圆孔),为保证测试准确性,需要进行多次测量并记录样件中心偏差数据,可测得综合定位相关数据。
2.3 桁架综合实验台
根据上述实验项目的测试方法和测试仪器,设计以下桁架实验台,通过不同的测试平台完成四个项目的实验内容。实验台的整体布置形式及各实验器材的布置如图4所示。
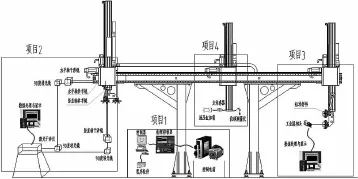
图4 桁架上下料产品实验台原理图
2.3.1 两轴速度指标项目
通过桁架控制器编写两轴往复运动控制程序,按系统允许的最大速度执行,以满足水平轴和竖直轴的最大行程范围动作为准。通过2.2.1中的测试方法,实现桁架机器人产品的该项指标测试。
测试结果包括两轴速度和加速度曲线,两轴最大速度和加速度数值。
2.3.2 两轴定位指标项目
通过桁架控制器分别编写两轴的往复运动程序,推荐速度为50m/min。以拾取端在竖直轴最大行程的80%处,测定的水平轴全行程的定位精度。以水平轴分别在最大、最小和中间点三处分别测量竖直轴的全行程定位精度。测量数值允许桁架控制器采用补偿修正定位精度的方法而达到的更高精度。通过2.2.2中的测试方法,实现桁架机器人产品的该项指标测试。
测试结果包括两轴的定位精度和重复定位精度数值曲线及标定的两轴定位精度和重复定位精度。
2.3.3 拾取端承载指标项目
以拾取端在竖直轴最大行程的80%处,以水平轴分别在最大、最小和中间点三处,分别测量拾取端的前后、左右两个方向的承载能力,通过2.2.3中的测试方法,实现桁架机器人产品的该项指标测试。实验中左右方向所施加力的以设计最大拾取能力(N)的最大的80%进行测量,前后方向所施加力的以设计最大拾取能力(N)的最大的25%进行测量。通过2.2.3中的测试方法,实现桁架机器人产品的该项指标测试。
测试结果包括拾取端分别在左右和前后两个方向的按拾取能力施加相应大小测试力下的变形数值。
2.3.4 综合定位指标项目
以拾取端装载了手抓模块为准,手抓抓取标准测试样件,在竖直轴最大行程的80%处,以水平轴分别在最大、最小和中间点三处,通过2.2.4中的测试方法,实现桁架机器人产品的该项指标测试。
测试结果包括手抓模块在抓取标准测试样件的情况下,测得的桁架综合定位数值,该项指标为桁架最终定位功能的体现。
3 结论
本文设计了一套用于测试不同类型桁架机器人产品的试验台,可对两轴速度指标、两轴定位指标、拾取端承载指标和综合定位指标进行测试和标定,并形成各测试项目的测试结果。所列实验内容和测试方法,可满足桁架机器人产品性能的测量和评定要求。本桁架实验台的研发,为国内外相关桁架产品的性能提供平台,并在以后的产品设计改进中可起到指导作用。本桁架实验台的研发,对桁架机器人产品在性能统一和测试标准的形成方面,起到一定的推动作用。
[1]戴德明.T形桁架自动线在轴承环自动化加工中的设计及应用[J].金属加工:冷加工,2012(14):68-69.
[2]权占群,张树礼.桁架机械手及在柔性加工自动线上的应用[J].金属加工:冷加工,2014(12):23-25.
[3]吴平.用于缸体三轴孔机床上下料的桁架机械手设计[J].组合机床与自动化加工技术,2009(3):72-74.
[4]王晓玉,姜宇,赵进,等.基于生产线实验台的运动控制方案研究[J].机械工程师,2014(8):89-90.
[5]丛明,石会立,宋鸿升,等.桁架机械手动态特性的有限元分析[J].组合机床与自动化加工技术,2008(6):19-22.
[6]何克祥.机械传动系统性能综合测试实验台研究与开发[J].组合机床与自动化加工技术,2007(9):90-92.
[7]宋威,孔祥志,孙进.主轴性能测试实验台[J].现代制造技术与装备,2013(2):44-46.
[8]赵进,仇健,张书峰等.数控车床样机定位精度及动态性能检测试验研究[J].机械与电子,2012(3):22-25.
[9]邓飙,邱义,张宝生.液压缸行程检测技术研究现状[J].液压与气动,2008(11):60-63.
[10]顾寄南,樊帆,关号兵,等.上下料机器人视觉控制系统的研究[J].机械设计与制造,2013(8):149-151.
(编辑 赵蓉)
Research on Gantry Loader Test Bed
LI Jin-dong1,WU Ying2
(1.No1.Lathe works,Shenyang Machine Tool Co.,LTD,Shenyang 110142,China;2.State key Laboratory,Shenyang Machine Tool(Group)Co.,LTD,Shenyang 110142,China)
Gantry loader has gained rapid development in recent years,and it varies from structure types,control systems,and characteristic parameters.A gantry loader test bed is needed to verify the comprehensive characteristic test of gantry loader product.This paper designs a comprehensive characteristic test bed,which can complete the test items such as the positioning accuracy,speed parameters,loading ability and comprehensive test.This test bed is adaptive to multi-type gantry loaders,and also supplies a standard test report which could not only shows the parameters but also advances valuable suggestions.
gantry loader;test bed;comprehensive characteristic test
TH122;TG65
A
1001-2265(2015)06-0090-03 DOI:10.13462/j.cnki.mmtamt.2015.06.025
2015-04-02
沈阳市2015年科技计划项目资助(F15-004-2-00)
李进冬(1981—),河北昌黎人,沈阳机床股份有限公司工程师,硕士,主要从事机床自动线产品设计研发,(E-mail)13609882268@ 163.com。
