基于Stewart平台的并联机床静刚度分析*
2015-11-03张海伟李建国
张海伟,李建国
(天津职业大学a.机电工程与自动化学院;b.机械工程实训中心,天津 300410)
基于Stewart平台的并联机床静刚度分析*
张海伟a,李建国b
(天津职业大学a.机电工程与自动化学院;b.机械工程实训中心,天津 300410)
对基于Stewart平台的并联机床进行了系统描述,计算了并联机床的自由度,利用UG NX8.0建立了并联机床的实体模型,针对并联机床复杂的机械弹性系统采用ANSYS14.0建立了有限元模型,对传动链中的铰链进行了适当地模拟。通过划分单元类型、施加载荷、求解与后处理得到动平台在广义工作空间下的刚度分布规律,从而为并联机床优化和结构改进提供了可靠的理论依据。
Stewart平台;并联机床;静刚度;有限元分析
0 引言
Stewart平台,也被称为Stewart虚拟轴并联平台,可以在一定范围内的空间实现六自由度运动(即俯仰、滚转、侧翻和上下、左右、前后的平动)。与常见的串型平台相比,具有机械负载重量比大,刚度性能好,运动速度加速度大和控制精度高等优点,因此其应用范围十分广泛,尤其在并联机床应用领域[1]。目前国际学术界和工程界越来越重视对并联机床的研究和开发,以Stewart平台为原型研制了不同结构形式的并联机床。机床的静刚度是指机床抵抗恒定载荷的能力,是机床的重要性能指标之一,刚度不足,会使机床杆件及构架产生变形,导致机床工作不稳定、精度差,甚至导致机床本身结构的破坏,因此,保证并联机床具有足够的静刚度十分重要[2]。并联机床的静刚度特性较为复杂,涉及到机床构件的弹性动力学变形和弹性变形等问题,相关的文献资料不多,目前还未建立完全成熟的研究模型,有些只是考虑将机床传动链与机架弹性变形视为一个刚体,对理论模型的可靠性有一定影响[3]。为了研究并联机床这个复杂机械系统的静刚度,本文采用有限元分析(FEA)方法和相关软件ANSYS,建立并联机床的FEA模型,求解机床在几个典型位置的静刚度,得出相应的结论,从而为并联机床的结构改进设计与受力情况分析提供可靠的理论依据[4]。
1 并联机床有限元模型的建立
1.1 并联机床整机的机构分析
六自由度并联机床Stewart平台有6条腿,6条腿与基础平台abc通过虎克铰连接,与动平台ABC通过球铰连接,改变6条腿的长度可使动平台到达要求的位置和姿态,以实现对各种复杂曲面零件的加工[5]。其结构如图1所示。
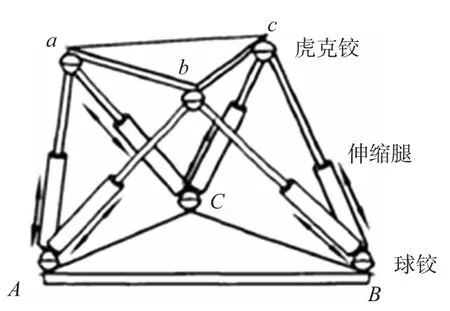
图1 Stewart平台的结构示意图
该平台的自由度可用空间机构自由度的计算公式(Kutzbach Grubler)求得[6]。Kutzbach Grubler公式为

式中:M—表示机构自由度数;
d—表示机构的阶数;
n—表示构件总数;
g—为运动副总数;
fi—为第i个运动副的相对自由度数。
在Stewart平台中,机构阶数d=6,构件数n=14,运动副数g=18,运动副总的自由度数为
由于每个支链有一个局部转动自由度,因此机构的自由度为6。若输入机构原动件的数目为6,该机构能够实现确定的运动,这种机构可以在三维空间作任意方向的移动和绕任何方向、位置的轴线转动[7]。
1.2 有限元模型的建立
1.2.1 实体模型的建立
鉴于有限元分析软件几何建模功能的局限,本文采用UG NX8.0进行实体建模,如图2所示,将实体模型转换为*.x-t文件格式,供ANSYS14.0调用,实现UG和ANSYS之间的数据传递。
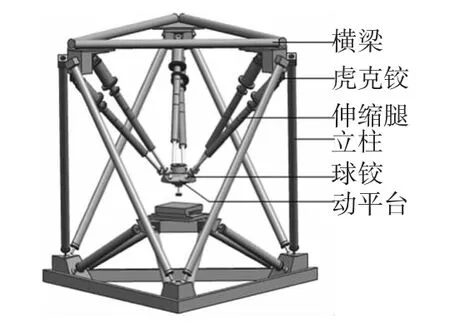
图2 并联机床的CAD模型
1.2.2 网格的划分
合理的划分网格,选用合适的单元类型可以使简化模型,提高运算速度和计算精度,对于并联机床的不同的零部件要选用不同的单元类型。
(1)动平台:体单元,选用三自由度20节点六面体实体单元Solid95。
(2)立柱、横梁和腿:线单元,选用三维六自由度线单元Beam4。Beam4是个三维弹性线单元,可用于轴向拉伸、压缩、扭转和弯曲单元。
1.2.3 铰链的模拟
考虑铰链本身的变形,在模型中利用MATRIX27单元对其进行模拟,在铰链点位置定义关链点(key point)和硬点(hard point),这样划分网格时可以在指定的位置产生节点[8]。以球铰为例,图3是其模拟的示意图。
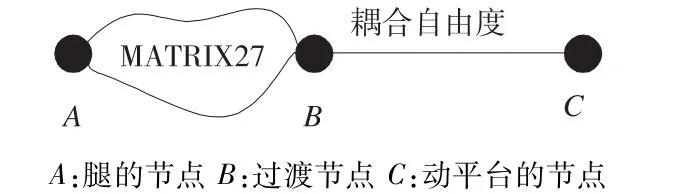
图3 球铰的模拟
A、B和C三个节点都建立在球铰点位置上,在腿的节点A和过渡节点B之间定义MATRIX27单元,该单元可以定义铰链本身的刚度(包括平动刚度和转动刚度)。C是动平台上的节点,B、C之间定义了耦合自由度,也就是使B和C之间的平动位移相等,最终的球铰FEA模型如图4所示。
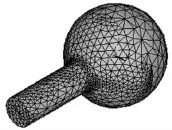
图4 单个球铰的FEA模型
1.2.4 载荷的施加
ANSYS中的载荷数据包括自由度约束、点载荷、面载荷、体载荷和惯性载荷等,在静刚度分析中,需要用到两种载荷,即立柱底部的自由度载荷和受力点的点载荷。在球铰两端分别施加载荷并求解,可以估算出其拉压刚度为

1.2.5 求解和后处理
刚度的求解设置比较简单,施加两种载荷,即固结在地面的自由度载荷和在受力点的力载荷,并选用ANSYS中的结构静态分析(Structure Static Analysis)求解器,求解是软件的核心过程,用户不需要干预,并联机床的最终FEA模型如图5所示。
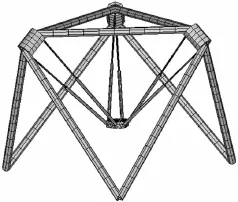
图5 并联机床的FEA模型
2 并联机床的静刚度分析
2.1 并联机床的结构和几何参数
所研究并联机床的结构以Stewart平台为原型,每条伸缩腿的传动系统结构如图6所示,腿长的变化通过丝杠螺母的相对运动实现,发生弹性变形的部件主要有上腿(即丝杠)、下腿、球铰以及虎克铰,其中下腿承受载荷的部分长度不变。
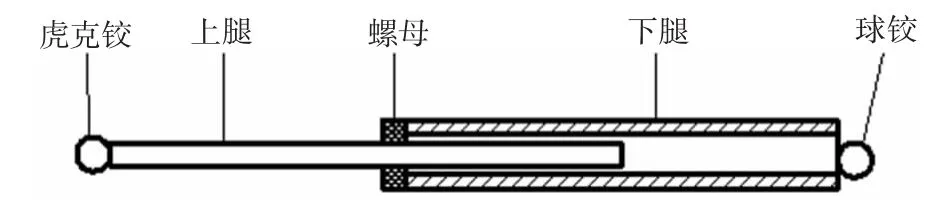
图6 每条伸缩腿的传动系统
并联机床各部分截面均为圆环
表1 截面的几何参数(mm)
参数横梁立柱上腿下腿外直径(mm)1261262749内直径(mm)92105030
形,其截面的几何参数如表1所示。
2.2 机床静刚度的分析结果
Stewart并联机床的静刚度计算方法,施加静力载荷F作用在动平台坐标系原点,利用ANSYS14.0计算出该点的位移量D,那么机床静刚度可通过下式计算

采用该方法计算了并联机床在五个位置下沿X、Y和Z三个方向的静刚度,这五个位置坐标分别为(单位是mm):I(0,0,800),II(300,0,800),III(0,300,800),IV(-300,0,800)和V(0,-300,800),并且动平台的姿态保持一致,用RPY角表示为(0,0,400)。静刚度的计算结果如图7~图9所示,可以看到,机床沿X方向、Y方向的静刚度分布规律相似,随静载荷呈线性分布;沿Z方向的静刚度特性好于X向和Y向,静刚度极值出现在中心位置。
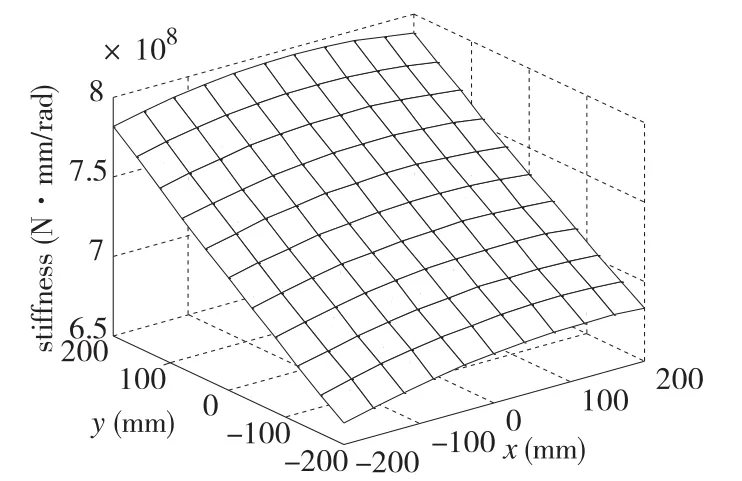
图7 沿X方向的刚度
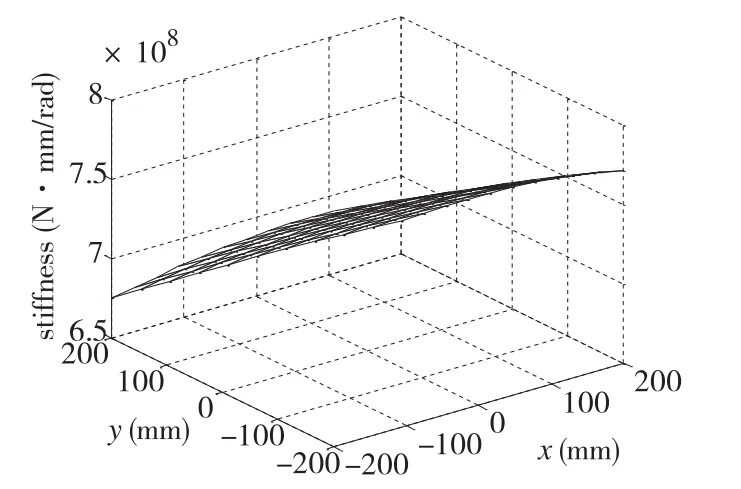
图8 沿Y方向的刚度
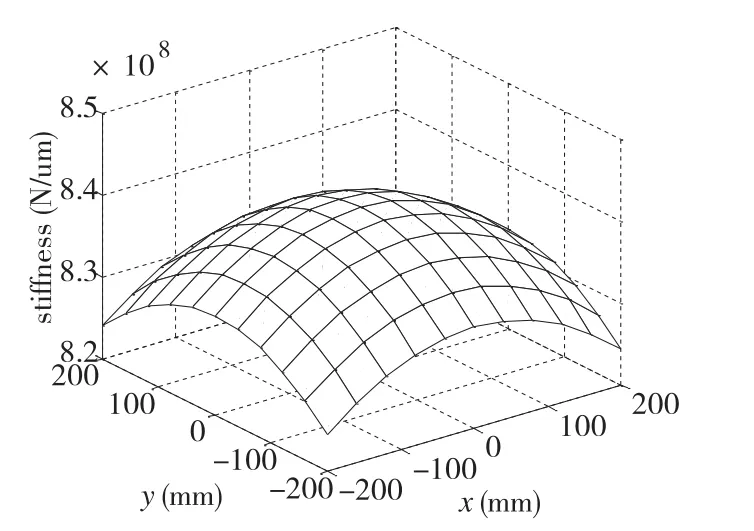
图9 沿Z方向的刚度
3 结论
通过对Stewart并联机床的静刚度分析,得出如下结论:
(1)利用ANSYS进行有限元析时忽略了机床传动链中的微小部件变形,例如锁紧螺母、滚动轴承等。假定了胡克铰和球铰是理想的铰链关节和球形接头,并进行了有限元模拟,其受力而产生的微小变形不会影响并联机床的整体刚度。
(2)在并联机床的三个方向的刚度中,沿z方向的静刚度远大于另外两个水平方向(约为3~4倍),从中心到边界逐渐变小;在平面内沿x方向和y方向的静刚度变化不大,刚度极值出现在边界,最大值和最小值都没有在中心位置出现。
(3)本所提出的建模策略以及机床刚度在工作空间中的分布规律,对指导各类并联机床的运动学和刚度设计具有普遍指导意义。
[1]郑相周,罗友高,宾洪赞.转动型3-UPU并联机构的刚度分析[J].机械设计与制造,2007(7):52-54.
[2]李永刚,宋轶民,冯志友.并联机器人机构静刚度研究现状与展望[J].机械设计,2010,27(3):1-3
[3]刘玲玲,赵新华,李彬.一种三自由度并联机构刚度分析及仿真[J].天津理工大学学报,2011,27(4):37-38.
[4]李聪.6PUS-UPS并联机床动力学性能分析与研究[D].秦皇岛:燕山大学,2011.
[5]田东升,邹平,刘永贤,等.基于ANSYS二并联螺旋面钻尖刃磨机床刚度分析[J].组合机床与自动化加工技术,2009(4):25-29.
[6]姜媛媛,李经伟,李恨.基于Pro/E的并联机床动态仿真[J].机械设计,2010,27(5):19-21.
[7]赵辉.五轴联动并联机床关链技术[M].北京:知识产权出版社,2008.
[8]张曙,海啥尔.并联运动机床[M].北京:机械工业出版社,2003.
(编辑 赵蓉)
Stiffness Analysis of Parallel Machine Tool Based Stewart Platform
ZHANG Hai-weia,LI Jian-guob
(a.School of Electromechanical and Automation;b.Mechanical Engineering Training Center,Tianjin Professional College,Tianjin 300410,China)
Parallel machine tool based stewart platform is systematically described,the degree of freedom parallel machine tool is calculated,a solid model of parallel machine tools is established using UG NX8.0,in view of the mechanical elastic system of parallel machine tool a finite element model is established using ANSYS14.0.the hinge of transmission chain is properly simulated.The stiffness distribution in generalized workspace is got by dividing the unit type,appling load,solving and post-processing,the result provide a reliable theoretical basis for the optimization and structural improvements of parallel machine tool.
stewart platform;parallel machine tool;static stiffness;finite element analysis
TH166;TG502
A
1001-2265(2015)06-0042-02 DOI:10.13462/j.cnki.mmtamt.2015.06.012
2014-10-09;
2014-11-24
天津市自然科学基金项目(13JCYCJB18100)
张海伟(1980—),男,天津蓟县人,天津职业大学副教授,硕士,主要从事机械设计、数控加工等领域的研究。(E-mail)zhw199937@ 126.com。
