基于Servo Amplifier验证走行轮可行性的系统设计与实现
2015-11-02杨健杨先勇
杨健杨先勇
(1.合肥京东方光电科技有限公司自动化技术部,安徽合肥230011;2.东南大学自动化学院控制工程,江苏 南京 210096)
基于Servo Amplifier验证走行轮可行性的系统设计与实现
杨健1,2杨先勇1
(1.合肥京东方光电科技有限公司自动化技术部,安徽合肥230011;2.东南大学自动化学院控制工程,江苏 南京 210096)
在现代工厂生产中,设备稳定运行的可靠性对于整个工厂生产有着至关重要的意义。而如何去确定某种新型替代产品的材料的稳定性不仅仅要从理论上的数值指标去评价,更为有效直观的是通过某种方式去模拟现场生产条件而估算出其寿命以及其可行性。针对此种情况,设计出可验证走行轮材料可行性的系统。首先,根据现场实际情况,机械方面利用千斤顶施压模拟RM车身自重,直线走行轨道则利用铝制轮弧形运动模拟实际情况下的直线运动,电气控制方面在综合考虑成本的前提下使用无上位机的Servo Amplifier驱动电机周期性的变速模拟RM实际运行状态。最后通过测量运行之后的温度、硬度以及磨损状况去评价判定替代走行轮材料的可行性。
工程应用;验证系统;模拟测试;走行轮替代材料;伺服放大器(Servo Amplifier)
0 引言
验证可行性系统普遍存在于社会的各个环节及领域,已逐渐成为工业生产中不可或缺的环节。
在现今的工业生产,尤其是制造业大量生产中,设备由于长时间处于工作状态,嫁动率很高,不可避免的会出现由于疲劳性损伤而导致的设备老化,进而面临的就是高额的原品牌的备品费用。因而选择原品牌的替代品就显得十分重要。在这样的背景下,就必须找到通过某种模拟现实情况的系统去评价替代品材料的可行性。
经过考察研究发现,很多工厂出现走行轮车毂与聚氨脂弹性体(外部轮胎的主要材料)剥离的情况,结合目前国内聚氨脂弹性体生产厂家的状况,很多厂家并未生产过类似走行轮,无相关实验报告予以评估,故在这种背景下,本文提出可以验证走行轮替代的替代品以及节省成本方面有着十分积极重要的作用。同时,也可为以后工厂出现类似的问题提供强有力的技术验证支持。
1 聚氨酯特点
聚氨酯全称是聚氨基甲酸脂,大多数工业生产中涉及到的走行轮均采用此种材料,主要优点如下:①卓越的耐磨性能,其耐磨性能是普通橡胶的3~10倍;②优异的力学性能,其抗拉强度、断裂伸长率、抗撕裂强度等力学性能大大优于普通橡胶;③具有较宽的硬度适应范围,可在较宽的硬度范围内保持较高的弹性;④具有较宽的模量范围,其模量介于普通橡胶和塑料之间。
2 系统设计
该系统设计以现实工厂生产中的自动搬运系统中的RM的运行为模拟对象,以Servo Amplifier为主驱动器驱动电机完成对现场运行状况的模拟。主要思路是将在空间上无限的直线运动转换为空间上有限的可以操作的圆周往复运动,并配合千斤顶模拟RM车身自重。
(1)系统总体布局概要。该系统总体布局如图1所示,总体分为机械设计部分与电气控制设计部分。
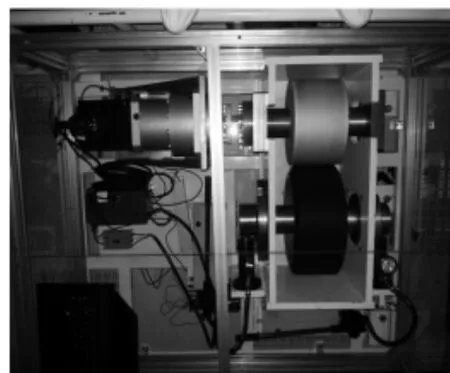
图1 系统总体布局图Fig.1 Overall layout of system
(2)系统机械设计部分。机械部分详细如图2所示,依据现场模型为例,电机选用精度较高的HF-SP502BJ,减速机选用VRGF-15F230-5000,同时为了保证电机减速机与铝制轮的轴能够保持在同一高度,需要在电机减速机侧安装支撑架,此处需要较高安装精度,否则不利于后期测试。
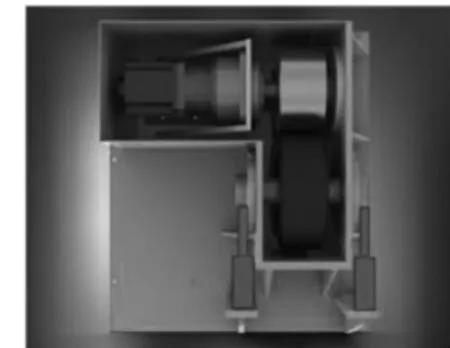
图2 系统机械布局图Fig.2 Mechanic layout of system
由于场地限制,将现场走行轮与走形导轨的直线运动,改为铝制轮与聚氨酯轮相向对顶旋转运动,如图3所示。对顶则利用带有示数的千斤顶施加压力。
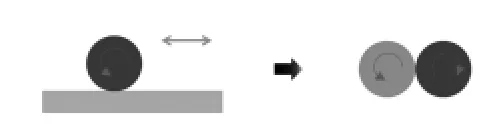
图3 运动状态模拟转化Fig.3 Motion state simulate conversion
为了可以使千斤顶施加不同的压力,则固定聚氨酯轮(即需验证可行性的走行轮)的轴必须可移动,因而在轴承端盖处的紧固螺栓必须可移动。
模拟RM本身自重方面,使用带压力表的千斤顶,给聚氨酯轮施加相当的压力(2.5T),模拟现场走行轮所承受的自重。由于实际工况是走行轮与直线轨道接触,而实验时改成走行轮与铝制轮相向对顶旋转,如果载荷相同,那么聚氨脂走行轮最大应力是不一样的,会产生一定的误差,所以需要进行一定的换算。根据弹性力学中赫兹公式:
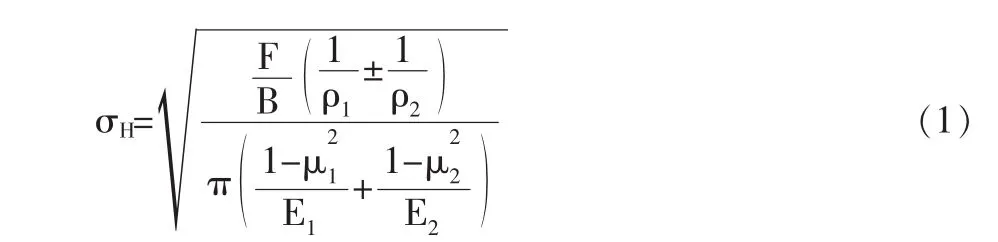
式中:F—作用于接触面上的总压力;B—初试接触长度;ρ1和ρ2—分别为零件1和零件2初试接触线处的曲率半径,通常,令,称为综合曲率,而ρZ=称为综合曲率半径,其中正号用于外接触,负号用于内接触;μ1和μ2—分别为零件1和零件2材料的泊松比(Poisson Ratio);E1和E2—分别为零件1和零件2材料的弹性模量。利用上述公式,假设实际运行时的RM的走行轮的最大应力为σ1,而在该系统实验下的走行轮的最大应力为σ2,则:

式中ρ1、ρ3—聚氨脂走行轮接触处的曲率半径;ρ2—直线导轨接触处曲率半径;ρ4—实验铝制轮接触处曲率半径。其中,铝制轮的直径为300mm,而聚氨酯轮的直径为400mm。由于ρ2→∞,令σ1=σ2,ρ1=ρ3则:

即应当给千斤顶施加8.2MPa的压强。
(3)系统电气控制设计部分。在系统电气结构方面,在不连接上位机的情况下选用MR-J3-500B-KJ056,直接驱动伺服电机带动铝制轮运动。同时,正常工作情况下用DC24V电源解开伺服电机抱闸,Servo Amplifier选用制动电阻MR-RB50,其余电气接线如图4所示。
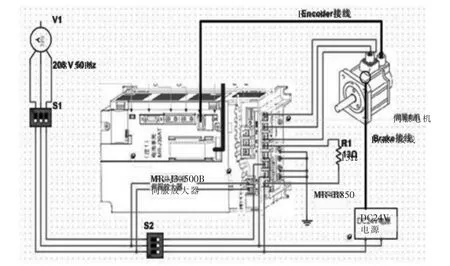
图4 系统电气设计图Fig.4 Electronic layout of system
在控制电机动作时,采用MR-Configurator Setup221软件进行控制。Test模式中,Jog为单步运行模式,可以进行简单的速度、脉冲,加减速时间等有限固定的单步动作;Position模式中,可以完成一次简单的加速和减速、正转或反转的过程;而在实际进行实验中则需要使用Test选项中的Demo模式,在此模式下可进行编程操作,伺服放大器按照编程的语句顺序执行指令,从而驱动伺服电机完成想要的动作。
如图5所示为测试时实验轮的运动曲线,设计其模拟现场实际情况为一个周期内4.2s加速至2500r/min,匀速运动6.6s后,至第15s减速至0,再停止15s。

图5 实验走行轮速度曲线Fig.5 Speed graph of test travelling wheel
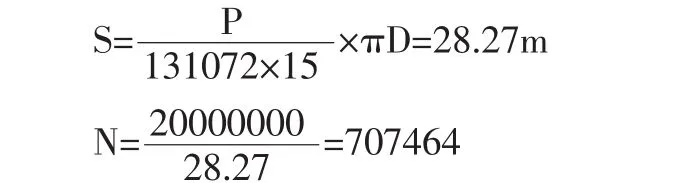
计算一个循环过程中所需加的脉冲数,伺服放大器分辨率为131072 Pulse。匀速过程中的脉冲数为:

两段匀变速过程中的脉冲数为:

所以总脉冲数P=P1+P2=58982400Pulse。再计算一个循环过程中实验轮的里程数,减速机减速比为15,铝制轮直径为0.3m,一般走行轮寿命里程数为20000000m则:
3 实验结果
实验中选用三种不同材料制作的的走行轮,走行轮A(主要材料为PPDI),走行轮B(主要材料为TDI与MDI的混合物),走行轮C(主要材料为普通轮胎人工橡胶与天然橡胶的混合物)。实验结果如表1所示。因而综合来看,选用走行轮B,MDI与TDI的混合物作为替代品最佳。
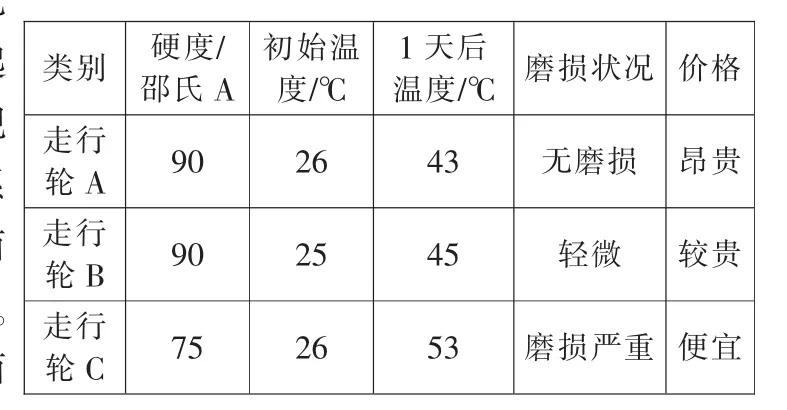
表1 三种不同材质走行轮实验前后数据对比Tab.1 Travelling wheel date comparison of three kinds of different materials
在后期针对走行轮B进行长期运行测试中,也证实了该材料在各关键参数方面有着较高的稳定性。表2为后期单独长期测试中的各数据指标。从以上分析表格数据中可以看出,从设备安全运行角度以及成本控制角度综合考虑,选用走行轮B是最优选择。
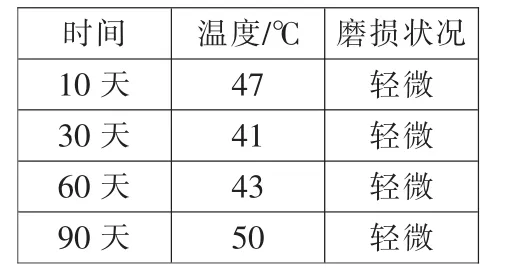
表2 走行轮B(TDI、MDI混合物材料)测试结果Tab.2 Test result of travelling wheel B
4 结束语
为了解决各种替代品在能否可以稳定运行在原工作环境而又不能直接替换尝试的情况下,建立起一套模拟现实运行的系统是有效而又必要的。能够快速而又准确的找到稳定可靠的替代品对于现代工厂的生产有着十分重要的意义。另外,该可行性验证系统是以具体实例为例给出的设计方案,针对类似的相关情况可以将系统稍加改装即可完成可行性实验验证的目的。
[1]袁坤,敖荣庆.伺服系统[M].北京:航空工业出版社,2006.
[2]吴红星.电机驱动与控制专用集成电路应用手册[M].北京:中国电力出版社,2009.
[3]Karshenas A M,Dunnigan M W,Williams B W.Adaptive inverse control algorithms for shock testing,IEE Proceedings.Part D:Control Theory and Applications,2000,3.
[4]Wang ZhongSheng,Liao XiaoXin.Synchronization and Parameters Identification of Chaotic Systems via Adaptive Control.Journal of Electronic Science and Technology of China,2005,1.
[5]高景德,等.交流电机及其系统的分析[M].清华大学出版社,1993.
[6]Jeff K Pieper.First order dynamic sliding mode control.Proceedings of the 37th IEEE conference on decision&control,Tampa,Florida USA,December 1998.
[7]吴家龙.弹性力学[M].高等教育出版社,2001.
[8]许尚贤,陈宝生.液体静压和动静压滑动轴承动态特性分析计算[J].机械设计,1988,3.
[9]李兴中,等.液压设备管理维护手册[M].上海:上海科学技术出版社,1996.
[10]Yeong C Y,Won H J.Segmented block copolyetheramides based on nylon 6 and polyoxypropylene.I.Synthesis and characterization. Journal of Applied Polymer Science,1994,5.
[11]Huang C C,Chang F C.Reactive comptibilization of polymer blends of poly(butylene terephthalate)and polyamide 6,6:2、Morphological and mechanical properties.Polymer,1997,17.
[12]D C Sun,D E Brewe.Simultaneous Pressure Measurement and High-speed Photograph Study of Cavitation in a Dynamically Loaded Journal Bearing[J].ASME,1993,115.
[13]Wang ZhongSheng,Liao XiaoXin.Synchronization and Parameters Identification of Chaotic Systems via Adaptive Control.Journal of Electronic Science and Technology of China,2005,1.
Design and Implementation of the Feasibility Verification of Travelling Wheel System Based on Servo Amplifier
YANG Jian1,2,YANG Xian-Yong1
(1.Hefei BOE Optoelectronics Technology Co.,Ltd.,Department of Automation Technology,Hefei Anhui 230011,China;2.Southeast University,College of Automation,Control Engineering,Nanjing Jiangsu 210096,China)
In modern factory production,the reliability of equipment stable has a crucial importance to entire factory production.How to determine and evaluate the stability of a new alternative product materials,not only from the theoretical value,more effective and intuitive solution is to simulate field product conditions in a good way.So it is essential to Design a system of verifiable travelling wheel material feasibility.Firstly,according to the actual situation,Simulating the body weight of RM by jack in mechanical,and simulating the traveling straight track linear motion by arc motion of aluminum wheel.Secondly,in electric control aspect,for considering the costs,Using servo amplifier to drive servo motor without PC to simulate the actual motion state of RM.Finally,it is determined and evaluated the feasibility of alternative travelling wheel by the measurement of temperature,hardness and damaged condition.
engineering applications;verification system;simulation test;traveling wheel alternative materials;servo amplifier
TB24
A
10.3969/j.issn.1002-6673.2015.02.022
1002-6673(2015)02-064-03
2015-01-06
杨健(1988-),男,安徽淮南人,在读硕士研究生,工程师。研究方向:电气工程,控制工程;杨先勇(1986-),男,安徽六安人,学士,工程师。研究方向:机械设计与应用。
