基于功率键合图的液压同步系统建模
2015-11-02董彬陈晓静
董彬,陈晓静
(黄河交通学院,河南 焦作 454150)
基于功率键合图的液压同步系统建模
董彬,陈晓静
(黄河交通学院,河南 焦作 454150)
在建立液压系统的动态数学模型时,功率键合图是一种有效的工具,可以先根据一些规则,画出所研究系统的功率键合图,然后由功率键合图可以方便地写出状态方程,即使比较复杂的系统,这一过程也可以有条不紊,而状态方程中的状态变量一般都是所研究系统中具有实际意义的各物理量。
功率键合图;液压同步;建模
0 引言
功率键合图(简称键合图),是一种用来描述工程系统能量结构的图示表示方法。它以一种向量的形式给出了复杂系统的简练描述,这种方法于1959年由美国的H.M.Paynter教授提出,之后由D.C.Karnopp、R.C.Rosenberg、J.U.Thoma、P.C.Breedveld和P.Dransfield等将其逐步发展完善和推广使用,使之成为一种可以统一处理多种能量范畴工程系统的、十分有效的动态建模与分析方法。功率键合图方法的核心思想是认为一个工程系统的动态过程,即是其功率流在特定激励作用下重新分布与调整的过程,以一种统一的方法对系统各部分功率流的构成、转换、相互间逻辑关系及物理特征等进行描述,即可实现对该系统模型的充分且完备的定义描述。它采用若干基本构成元素,诸如功率键、作用元、源、结点、变换器和回转器等来表征系统基本物理特征和功率转换与守恒的基本联接方式。为系统动态模型的准确定义描述及据此有规律地推导状态方程提供了一条十分有效的途径。
1 功率键合图基本构成元素
(1)功率键:功率键由一条一端带有半箭头的直线段表示,代表能量通口间功率传递或交换的通道。其中半箭头的方向为经该通道所传递功率流的参考方向。
(2)作用元:作用元用来表达对系统动态特性产生某种影响作用的因素,依作用性质的不同,分为阻性元、容性元和感(惯)性元三种作用元,通常以字母R、C、I来标识。
(3)源:源可视为一种特殊的作用元,也是一种1-通口元件。源的特点是通过功率键在源与系统间传递的功率总是由这样的一对功率变量构成:势或流两者中有一个保持定值或被约束为某种特定的时间函数而与源所供给或吸收的功率无关。若势变量为常量,则称其为势源,用Se表示;若流变量为常量,则称为流源,用Sf表示。
(4)变换器:变换器是用来描述功率守恒与转换规律的键合图元素,它是一个2-通口元件,其标识符号为TF。
(5)回转器:回转器的标识符号为GY,用来描述系统中另一种方式的功率平衡。
(6)结点:①0结点又称为共势结点,用来联系系统有关物理效应中能量形式相同且数值相等的势变量;②1结点也称为共流结点,用来联系系统有关物理效应中或构件中能量形式相同且数值相等的流变量。
(7)因果线:因果线是标在功率键一端的小线段,用来表示功率键上两个功率变量之间的因果关系,即何为自变量,何为因变量。表1列出了所有标准通口元件积分因果关系的标注情况。

表1 各通口元件的因果关系标注图
2 液压控制系统组成介绍
电液比例同步系统原理如图1所示,其工作原理为:电液比例阀的Y口和Z口分别和两个节流阀的出口相并联后连接到两个液压缸Ⅰ和Ⅱ的无杆腔,电液比例方向阀的油路便成为其中一个液压缸的另一个油路,通过补油可以使该液压缸的速度加快而使两液压缸的位移差逐渐减少,直至为零。液压泵输出的压力油液,经过节流阀进入液压缸,通过调节节流阀使两支路流量大致相同,以使两液压缸的位移和速度大致相同。当外界负载发生变化时,两个节流阀的流量不同,其位移和速度就会不同。如果在某一时刻液压缸Ⅰ的位移大于液压缸Ⅱ的位移,两个位移传感器将分别检测出两个液压缸的位移信号,并将它们反馈给电液比例放大器,并在其内部进行比较。之后,将其偏差信号放大后传递给电液比例阀的右侧比例电磁铁,使电液比例阀的右位进行工作。此时,液压缸Ⅱ的进油腔通过电液比例阀与油泵相通,从而使液压缸Ⅱ的速度加快,使两液压缸的位移相同,即可实现位移同步。
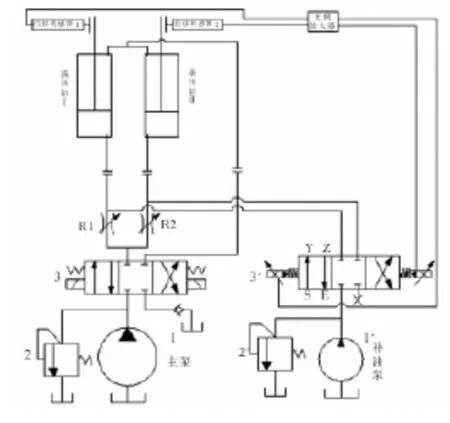
图1 电液比例同步控制系统原理图Fig.1 The principle graph of electric hydraulic proportional synchronous control system
其同步控制系统框图如图2所示,位移传感器将检测到的输出位移信号在放大器内部进行比较,其偏差通过放大器放大后作用在比例阀的阀芯上,通过调节阀芯的位移,来改变阀的开口度,从而改变进入液压缸的流量,减小液压缸位移误差,使两液压缸趋于同步。

图2 电液比例同步控制系统框图Fig.2 The block graph of electric hydraulic proportional synchronous control system
3 液压控制系统功率键合图的建立
由于功率键合图最大的优点是可以进行模块化处理,所以我们对整个电液控制系统分块进行建模,最后再进行合并。
(1)惯性负载功率键合图,详见图3(a)。
(2)液压缸功率键合图。液压缸是将液压能(压力*流量)转换为机械能(力*活塞速度)的执行元件。液压缸的动态模型要包括摩擦(活塞和压盖处密封)和液压缸端部容腔的容性影响。当考虑到液压缸排油腔中的背压力,并忽略被加速时Ia吸收的功率,根据因果关系标注原则标注因果关系线,就可以得到液压缸功率键合图模型,如图3(b)所示(以液压缸Ⅰ为例进行说明)。
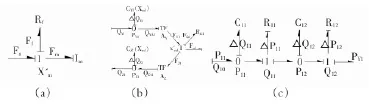
图3 各元件键合图模型Fig.3 The bond graph model of elements
(3)管道功率键合图。管道的功率键处须加一个1节点,用来表示管道的液阻。同样,管道的液容可以在适当的功率键处,从一个0节点C引出来表示,分别由其因果关系得出所需要的未知量。由于管道并非都是直的,在本文中,管道的布置采用了部分弯管,进、出油管道可以看作是对称布置,并且各含有两个弯头。系统中长管道主要布置在电液比例阀和液压缸之间,在液压泵与比例阀之间的管道可以理想化为直管道。对比例阀与液压缸之间的进油管道进行建模,结果如图3(c)所示(以液压缸Ⅰ的进油管道为例)。
(4)电液比例阀功率键合图。电液比例方向控制阀是能够同时实现液流方向和流量比例控制的复合功能阀。这类阀具有三个或三个以上的通口,主阀大多采用三位四通滑阀,而输入信号大多为电信号。电液比例方向阀中比例电磁铁必须克服弹簧力、摩擦力和功率级液动力才能控制阀芯位移。现将电液比例方向阀的每个控油口看作一个阻尼器,其阻尼由阀的位移XV引起的开口量进行调节。理论上,中位封闭式阀的阀芯处在中位时,四个控油口不允许有液流通过,但允许阀芯从中心向左或向右移动,此时阀中就有四种控制液流的可变液阻。其键合图如图4所示。如果滑阀处于中位,则四条可能的通路都各有无穷大的液阻,不产生液流。如果滑阀从中向右移动,Xv为正,开口RST和RZE的液阻变为有限值,允许液流通过,而开口RSZ和RYE的液阻仍为无穷大,阻止液流通过。因此液流可从油源通过控制口Y,以及能通过控制口Z回油箱。

图4 电液比例方向阀键合图Fig.4 The bond graph of electro-hydraulic proportional direction valve
(5)液压控制系统功率键合图。综合上述各阶段的功率键合图,将其进行合并后可以得到带长管道的电液比

图5 带长管道电液比例同步系统功率键合图Fig.5 The power bond graphs of electro hydraulic proportional synchronous system with long pipes
4 总结
本文简要介绍了功率键合图建模方法,并逐步建立了液压缸、电液比例阀等功率键合图模型。在此基础上,由电液比例同步控制系统原理图建立了带长管道的电液比例同步控制系统功率键合图模型,为下一步系统的动态数学模型和仿真奠定了基础。
[1]董彬.管道效应对液压同步系统动态特性的影响研究[D].河南工业大学,2008.
[2]田勇,董彬.功率键合图在电液比例同步系统中的应用[J].机电产品开发与创新,2008.
The Hydraulic Synchronous Control System Based on Power Bond Graph Mathematical Modeling
DONG Bin,CHEN Xiao-Jing
(Huanhe Jiaotong University,Jiaozuo Henan 454150,China)
In building a dynamic mathematical model of hydraulic system,the power bond graph is an effective tool,can according to some rules,first draw the research system by power bond graph,and then by power bond graph can easily write the equation of state,even more complex systems,this process can also be in an orderly way,and the state variables in the equation of state are generally studied has the practical significance of various physical quantities in the system.
power bond graph;hydraulic synchronization;modeling
TP27
A
10.3969/j.issn.1002-6673.2015.01.012
1002-6673(2015)01-032-03
2014-12-15
董彬(1982-),女,河南周口人,工学硕士,讲师。专业方向:机械制造及自动化。
