基于惯性导航的卸料小车定位系统
2015-11-02创新者尚名羽
创新者:郝 成 尚名羽
基于惯性导航的卸料小车定位系统
创新者:郝 成 尚名羽
基于集成度与实用性考虑,提出一种新的能够完全不受外界干扰的矿厂卸料小车航位推算装置设计,既基于惯性导航的卸料小车定位系统。该系统使用加速度传感器对小车的实时运动信息进行采集,再通过STM32F103VET6单片机对加速度传感器数据进行惯性导航推算,同时利用接近开关排除惯性导航算法的延时误差,将小车的航迹信息显于TFTLCD上。通过实地实验测试,该系统的测试结果满足实际应用的需求。
在大型矿厂中,堆料设备一般露天生产,扬尘大,泥水多等恶劣条件无法避免加上设备本身的震动等的干扰等,这样就对卸料小车的定位装置有着工作可靠、检测准确、经久耐用等基本的要求;实践证明激光、旋转编码器、行程开关无法满足长期的生产应用。相比而言,格雷母线,安装简单,抗污染能力强,防水,但电磁感应线圈的铺设成本过高。鉴于近年来全球卫星定位导航系统的迅猛发展,作者曾考虑将球卫星定位导航系统技术应用于卸料小车的定位,然而全球卫星定位系统会因为信号遮挡出现定位精度下降甚至无法进行方位解算的情况。所以研发一套能够独立完成定位,可靠性高的,稳定性良好的系统是市场亟需的。
结合到惯性航位推算算法本身是一种独立的航位推算算法的特点而且完成该推算过程的单片机体积只需晶片大小,能够使卸料小车完全不受外界干扰的,同时具有很高的集成度,于是设计出这样一套实用性高的卸料小车惯性导航推算装置。它使用加速度计传感器采集卸料小车运动信息,采用具有ARM Cortex-M3 内核的STM32F103VET6单片机作为数据处理单元,同时采用卡尔曼滤波对航位信息进行滤波处理。最终将卸料小车航位推算信息通过载波通信技术输送给总控室或显示于TFTLCD显示屏上。同时考虑到航位推算技术自身的延时误差,计划在航位推算技术的基础上结合接近开关来矫正误差。
惯性导航定位设备数据更新速度快、短期精度高、稳定性好,抗污染能力强,防水、油、灰尘等,这样就克服了以上困难。而且像加速度传感器等,现在市场已经有了比较成熟的惯性导航定位装置,这些装置体积精小,投资小,便于安装,维护简便。
系统组成与工作原理
该卸料小车航向推算装置具体的组成框图如图1所示,包括传感器模块、接近开关模块,数据转换模块、处理模块以及电力线载波通信模块组成。
矿山堆场卸料小车堆料示意图如图2所示。
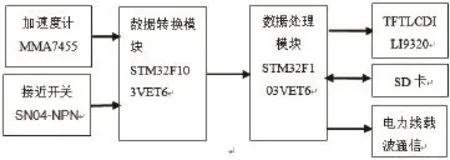
图1 系统组成框图
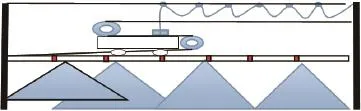
图2 卸料车堆料示意图
由于矿厂恶劣的环境,在给小车定位的过程中,由于接触式的机械装置本身固有的不稳定性,我们期许非接触式的机械装置。惯性导航定位是独立的算法,惯性导航定位系统就是这样一种非接触式的机械装置。但所有的导航推算本身都有延时误差,我们采用安装接触开关的方式来对小车的位置进行矫正。小车需要停留时使小车停留在接触开关的感应处,避免惯性导航运算的延时出错。关于通信,如果是用无线通信,一定会会有信号遮挡;使用有线的话,如果再接根通信电缆,电缆本身不结实,长时间往复,电缆很容易破损。考虑到小车上部故有一根电源线用于给小车提供电源,用有线载波通信是最佳选择。传感器模块上为加速度计MMA7455以及用于数据处理的单片机STM32F103VET6。实际工作时,加速度传感器模块很小,可以很容易的安装于小车上,用于采集小车前后方向上的加速度;传感器采集来的原始数据通过单片机STM323F103VET6进行航位推算初步处理。数据处理模块核心在与传感器模块串口通信的同时,将航位推算所需的数据通过文件系统存于SD卡中;通讯采用载波电流与数据处理模块进通信。显示模块采用的是TFTLCDILI9320,当工作人员需要查看小车当前的航位信息,单片机负责文件系统从SD卡中调出原始数据,推算出小车的航位信息,最终将小车的位置信息在TFTLCDILI9320显示。
硬件设计
主从单片机都采用ST公司生产的具有ARM Cortex-M3内核的工业级控制芯片STM323F103VET6传感器模块设计。加速度计采用MMA745可在2.16~3.6V低电压下正常工作,其量程为8g。接近开关模块采用狮威(LIONPOWER)的接近开关TL-Q5MC1。在小车定位过程中,接近开关的位置需要区分开来以确定小车的不同位置,一次要给接近开关的感应区编码,需要特别说明的是,本系统接近开关感应区编码采用格雷码。虽然自然二进制码可以直接经过数/模转换成为模拟信号,但是在某些情况下,例如十进制的3转变为4时,二进制码的每一位都需要改变,而在实际电路中,四位的变化不可能绝对同时发生,因为在某些情况下就导致电路状态产生错误,而格雷码就格雷码就没有这个缺点,可以避免这种错误。负责航位推算的主单片机与加速度传感器模块上的从单片机通过串口进行通信,它们被设置为相同的波特率。显示模块采用Ilitek公司生产的ILI9320。
软件设计
航迹推算原理
航位推算系统是一种完全可以不受外界干扰的定位系统。它的优点是可以通过自身集成的惯性传感器计算出汽车的速度和位置信息,短时间内测量的数据是可靠的,因此可以应用于卸料小车的定位。
惯性导航推算(DR,又称航位推算)系统是由测量距离和测量航向角的传感器构成。惯性导航推算是一种独立的定位方法,其基本原理如图3所示。
如图,在平面二维中研究运动中的车辆,当给出车辆的起始点位置(x0,y0),就可以运用加速度计获得的数据计算出车辆的行驶距离的变化量,从而可以推算出任何时刻车辆的具体位置。本研究中是运行中过的车辆,由于其一直变化,所以计算过程中,要分别对车辆的速度和距离进行分解。具体解算过程如下:
分解距离

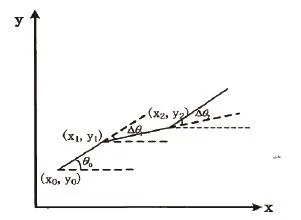
图3 航位推算原理图

图4 ILI932显示读取的加速度值


所以此时θi-1全为0。因此可得:

分解速度
卸料小车在行进的过程中一般只做前后的运动,x轴有速度,y轴没有速度,
依次推算,可得:
实例仿真
该实验设定一秒内读取加速度计100次,如图4,之后取平均值,然后调用惯性导航算法计算实际运行的路程。
惯性导航运用的环境是在GPS无法接收到信号时,包括料堆、隧道有遮挡的情景,而且这种场合下惯性推算导航运行的成本不会太长。所以,在有限的时间内,要尽可能的使数据处理的更准确。根据以上测试要求,本文设计了如下的测试方案。
实验设备:笔记本电脑一部,一辆简易四轮车,惯性导航定位系统一套。
实验过程:跑道测试场为从联大实验楼到科技楼一段直线马路,用粉笔做一个420米长的直线轨道,在测试起点,启动惯性导航定位系统,并连接到笔记本上采集数据。
用计算机把加速度计的输出信息变换到平面坐标系,然后计算出载体的速度信息,并在Visual Studio 2008程序的客户端区设备进行转换显示。由于卸料小车为在轨道上运动,通常都是直线,因此客户端向左为设备运动的初始方向X,建立设备的坐标系,进行绘图。
采用按像素点比例的方法解决客户区范围不足的问题,在软件平台建立惯性导航推算模型。通过软件编程实现STM32开发板把加速度计输出信息变换到平面坐标系,然后计算载体的速度,并通过出串口在Visual Studio 2008客户区进行显示。
从图6可以看出,从起点到重点的实际距离是420m,而世实际所测距离为423m,误差是3m,误差概率是0.71%。由此可见,惯性导航推算存在误差,
而这些误差是不可忽视的。如果要更精确的实现小车定位,那么就需要研究惯性导航推算的同时结合滤波算法,这也是今后努力的方向。
图5 实地跑车的界面

图6 获取的实际结果
结语
本文介绍了基于惯性导航的卸料小车定位装置的航位算法,对加速度传感器数据的采集和航迹推算,采用单片机与微惯性器件搭建的系统,集成度高、实用性强、成本低,易于维护。
投入运行后,能提高自动化程度和装备水平,一定程度上避免人工操作的失误,减轻工人的劳动强度,提高工作利用率,提高工作质量,减少检修、维护工作。可以为未来相似载体位置检测技术提供技术依据。
10.3969/j.issn.1001-8972.2015.10.025