动态气流温度测试技术
2015-11-01黄杨
黄 杨
动态气流温度测试技术
黄 杨
分析热电偶测量动态气流温度的原理和误差因素,通过计算和试验的方法,得到动态气流温度误差修正公式及时间常数,最后,给出一种测量动态气流温度的理论方法。本文主要解决动态气流温度测量延迟问题,并结合误差修正公式,提高测试精度。
气流温度是发动机工作过程的重要参数之一,在发动机试验中经常需要测量气流温度。气流温度的变化范围广、温度梯度大,一般采用热电偶进行测量,然而,热电偶测量动态气流温度时存在许多误差因素,忽略速度误差和传热误差,气流的动态特性是主要影响因素。本文从热电偶测量动态气流温度的原理分析,通过试验和计算的方法,得到动态气流温度误差修正公式及时间常数,给出一种测量动态气流温度的新方法,解决动态气流温度测量延迟问题,提高测试精度。
动态气流温度测试方法
在飞行试验中,动态气流温度一般采用热电偶进行测量。
用热电偶测量气流温度时,只要热电偶两个电极的材料确定,热电偶的热电势就只与热电偶两端的温度有关。如图1所示,如果使参考温度t0恒定不变,对给定材料的热电偶,其热电势就只与工作端温度t成单值函数关系,即EAB(t, t0)=f( t )。具体应用是用实验方法得到参考温度为0时的“热电势-温度”对应关系数据表-即该热电偶的分度表,有了这个分度表,在用热电偶测温度时,只要测得该热电偶的热电势EAB(t,0),就可查分度表确定出对应的被测温度的数值t 。
因此,我们在实际测量中如图1,先测出热电偶两端电势EAB(t, t0)和冷端温度t0,然后根据分度表查出与冷端温度t0对应的热电势EAB(t0,0)值,再根据式(1)得出热电势EAB(t,0),最后得到被测温度t 。

动态响应误差
热电偶测量动态气流温度时存在许多误差因素,忽略速度误差和传热误差,气流的动态特性是主要影响因素。因此,要准确测量动态气流温度,就必须找出动态响应误差并给以修正。
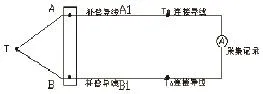
图1 热电偶实际测量电路
动态响应误差
由于测温元件有一定的质量,因此,测量的温度值总有一定滞后,在量值上将略低于被测气流温度,产生测量误差,这个误差就是动态响应误差。
当测热点处于热平衡时,输入测热点的加热率等于测热点内部的储热率。

由式(3)得出,动态响应误差∆Tτ为:

式(4)中的τ称为热电偶的时间常数,很明显,误差大小与热电偶的时间常数有关,如果热电偶的时间常数τ已知,根据热电偶测得的温度随时间的变化曲线,曲线上任意一点的斜率和的乘积,即为该点的动态响应τ误差,用它来修正相应的热电偶示值Tj,即可得到气流的有效温度Tg。
时间常数
如前所述,由式(3)得出:
由此定义时间常数:滞后温差与测热点温升梯度之比。
若被测介质温度从t=0时刻的温度Tg0变化到Tg时,热电偶结点(测热点)的温度从Tj0变化,在时刻t,热电偶的温度为Tj。为了求取时间t 的值,也就是时间常数τ的值,将式(3)积分并整理得:

图2 热电偶的响应曲线

图3 RC网络

若开始时,Tj0=Tg0=T0,当t 变化到某时刻t=τ时,将有:
这个时间称为热电偶的时间常数τ,该时间就是热电偶的温度达到被测介质温度63.2%所需要的时间。
时间常数τ一般用实验方法测定。给热电偶一个阶跃的温度变化,记录热电偶的响应曲线,取其幅值的63.2%处对应的时间为热电偶的时间常数。
下图为实验室测得的某一热电偶的响应曲线:我们可以在热电偶的响应曲线(图2)上找出(Tj-Tj0)等于阶跃温升(Tg-Tg0)的63.2%所对应的时间t,这个时间就等于热电偶的时间常数τ。
修正电路
由于热电偶的热惯性,在测量动态气流温度时将产生动态响应误差,测量值始终滞后并小于被测气流温度。从上面的分析可以看出,如果我们知道了热电偶的时间常数,就可以用外电路补偿的方法来实现动态误差修正。
热电偶的等效电路
一般的热电偶,可以用一阶线性微分方程描述:

上述过程可以用RC 充电电路等效模拟(图9),因此有:

其中RC=τ为充电时间常数。
我们可以引入近似为热电偶传递函数倒数的网络来实现热电偶动态误差实时修正。
动态实时修正电路
修正电路简单的有RL 网络和RC 网络,以RC网络为例。如图3所示,传递函数为:

若校正网络的时间常数等于热电偶的时间常数,即τ=τC,那么在理论上,测试系统的传递函数应为:

C试系统的传递函数为:

结语
从上面的分析可以看出,我们在采用热电偶进行动态气流温度测量时,为了提高测量精度,可以采用两种方式降低动态响应误差:
(1)减小传感器时间常数
(2)外电路补偿
如果我们知道了热电偶的时间常数,就可以用外电路补偿的方法来实现动态误差修正,修正网络的时间常数等于热电偶的时间常数。
10.3969/j.issn.1001-8972.2015.09.004
