基于H∞扰动补偿器的永磁直线电机伺服控制器设计*
2015-10-31武志涛李福云
武志涛,李福云
(辽宁科技大学 电子与信息工程学院,辽宁 鞍山 114051)
基于H∞扰动补偿器的永磁直线电机伺服控制器设计*
武志涛,李福云
(辽宁科技大学 电子与信息工程学院,辽宁 鞍山114051)
针对永磁直线电机伺服系统的高精度、高品质的控制要求,提出了基于加权积分增益滑模控制器与基于H∞控制的扰动补偿器相结合的控制方法。所提出的加权积分增益滑模控制器有效的解决了当系统在非滑动模态阶段时切换项增益增大的问题。H∞扰动补偿器不仅有效的保证了伺服系统的稳定性,而且抑制了滑模控制存在的高频抖振对控制系统输出的影响。通过仿真结果可以看出,所提出的控制方法使永磁直线电机伺服系统具有良好的动态性能,并具有对系统参数变化不敏感和鲁棒性强的优点。
永磁直线同步电机; H∞控制;滑模控制;扰动补偿器
0 引言
随着精密加工技术的迅速发展,高速、高精度成为数控技术发展的趋势之一。永磁直线电机比永磁旋转电机具有定位精度高、推力大、响应速度快、可靠性好等优点,因此直线电机将越来越广泛的应用于数控伺服系统中[1]。为了提高直接驱动控制系统的伺服性能,必须采用有效的方法对各种扰动进行抑制或者补偿[2]。文献[3-4]采用参考模型自适应的控制方法来抑制永磁直线电机伺服系统的扰动。文献[5]提出一种将负载补偿器和重复控制器相结合的控制方法,该方法补偿了质量波动对位置跟踪的影响。文献[6]提出了基于指数型趋近率滑模与反馈线性化的扰动观测器相结合的控制方案。文献[7]提出了最优化参数的位置控制与负载补偿控制策略,该方法对负载扰动具有较强的鲁棒性。
针对高精度永磁直线电机伺服系统动态特性和鲁棒性的要求,本文提出了加权积分增益滑模控制器和H∞扰动补偿器相结合的复合控制策略。为了使直线伺服系统具有快速的动态跟踪响应,提出了积分型切换滑模变结构控制器,其积分项中引入的负方向的权值Kf有效的避免了非滑动模态段切换项增益大的问题。对于滑模线附近的控制抖振,本文提出采用H∞控制方法加以削弱。设计的H∞扰动补偿器有效的削弱了滑模控制的抖振对系统稳态性能的影响,并抑制了闭环系统内的各种扰动。
1 加权积分增益滑模控制器设计
为了使直驱系统达到高精度、高稳定,并具有良好的动态跟踪性能,本文采用了加权积分切换增益滑模控制的方法来设计跟踪控制器。滑模变结构控制具有快速响应、对参数变化及扰动不敏感的特点。为解决非滑动模态段切换项增益大的问题,本节改进了积分形式增益的滑模控制方法,即在积分项中引入负的权值Kf,有效的解决了上述问题。
永磁直线同步电机在d-q坐标系下的矢量控制运动方程为:

(1)
其中
Fd=FL+Fef
(2)
式中:表示外部总扰动力;FL表示负载扰动;Fef表示直线电机端部效应引起的周期性波动推力。其数学模型为:
(3)
式中:Ffm表示波动推力的幅值,θ0为初始相位电角度,τ为极距, s为电机动子的位移距离。
(4)
y(t)=Γcx(t)
(5)

抑制滑模控制器的抖振问题是设计的重点,本文提出的加权积分增益滑模控制律设计为:
u=ueq+ud
(6)
其中
(7)
式中:σ(t)=Cx,C满足滑模稳定条件,且CB>0。在积分项ρ的表达式中,当ρ>0时,Kfρ<0,当ρ<0时,Kfρ>0。由于在公式(7)加入了负的权值Kf,有效的解决了当系统在非滑动模态阶段时切换项增益增大的问题。当负载扰动信号比滑动模态高频切换控制信号的幅值还大时,滑模控制将无法保证伺服系统的稳定性和鲁棒性。如果想使系统持续稳定,就需要幅值足够大的高频切换信号,但这又会导致控制器剧烈的抖振[8-9]。而H∞抗扰补偿器具有鲁棒性的特点不仅能保证伺服系统稳定性,而且可以使扰动的幅值减小为余差Δf。为解决滑模线附近的控制抖振问题,本文通过基于标准H∞控制问题设计的扰动补偿器加以抑制,进而提高控制系统的鲁棒性。
2 H∞扰动补偿器的设计
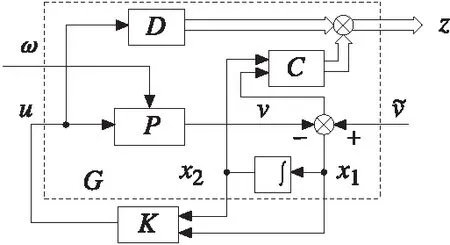
图1 H∞扰动补偿器结构图
设电机内部内部参数变化引起的不确定参数a和d的摄动量分别为δ1(t),δ2(t),则由公式(4)得到永磁直线电机增广被控对象状态方程为:
(8)
式中:外部扰动ω项的系数通常取摄动量的最大值。加权系数q1>0,q2>0用来整定误差的允许范围。由公式(4)确定具有内部参数摄动和外部扰动的标准的H∞被控对象如下:
(9)
式中:A,B1,B2,C,D为已知,ΔA和ΔB表示参数摄动矩阵,并且ΔA和ΔB满足:
(10)

对于给定的增广被控对象状态方程(9),可得状态反馈控制器为:
u=Kx
(11)
使得闭环系统满足以下两个标准H∞控制准则:
①任取Q∈Ω,闭环系统内部稳定;
②任取Q∈Ω,由ω到z的闭环传递函数Tzω(s)满足:
(12)

(13)

(14)
3 仿真结果及其分析
永磁直线同步电机伺服系统控制框图如图2。
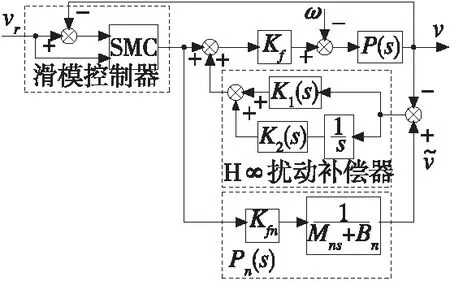
图2 伺服系统控制框图

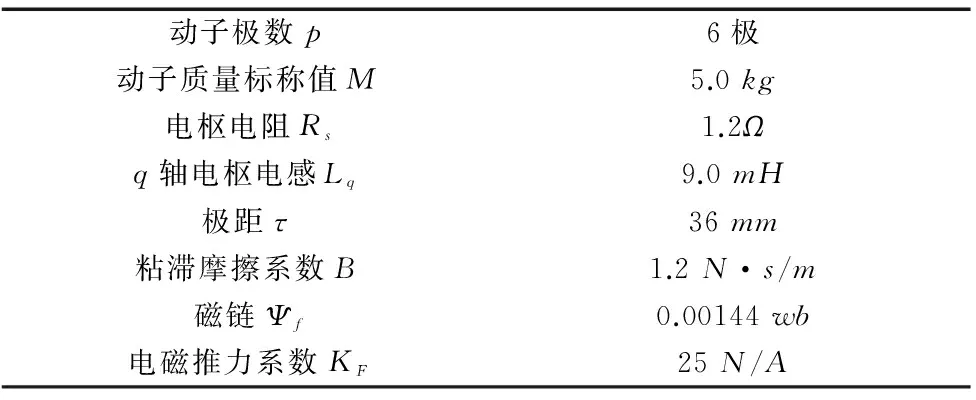
表1 永磁直线同步电机参数表
对永磁直线电机伺服系统进行负载参数变化条件下的突加负载力的仿真研究:永磁直线电机动子质量参数为M=1.5Mn,负载起动后在t=0.5s时,突加负载扰动力FL=40sin(25t)N(可视为端部效应引起的周期性波动推力)。
仿真一:对加权积分增益滑模控制器进行仿真。
仿真二:对加权积分型滑模控制与H∞负载扰动补偿相结合的控制方法进行仿真。
图3和图7分别为仿真一与仿真二的阶跃位移响应曲线;图4和图8分别为仿真一与仿真二的速度输出误差曲线;图5和图9分别为仿真一与仿真二的相轨迹图;图6和图10为输入控制量图。
(1)加权积分增益滑模控制的仿真结果
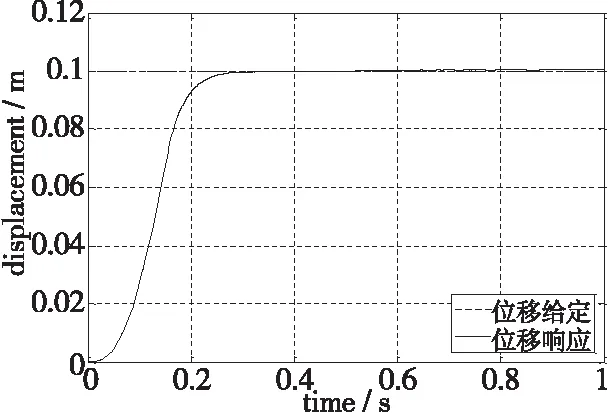
图3 阶跃位移响应曲线图
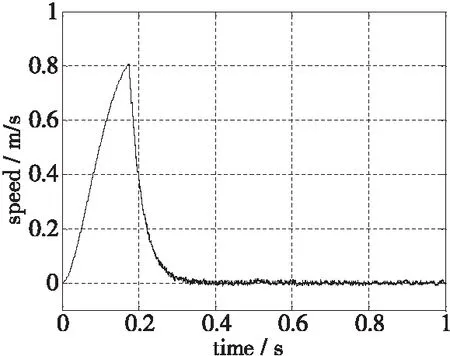
图4 速度输出误差曲线
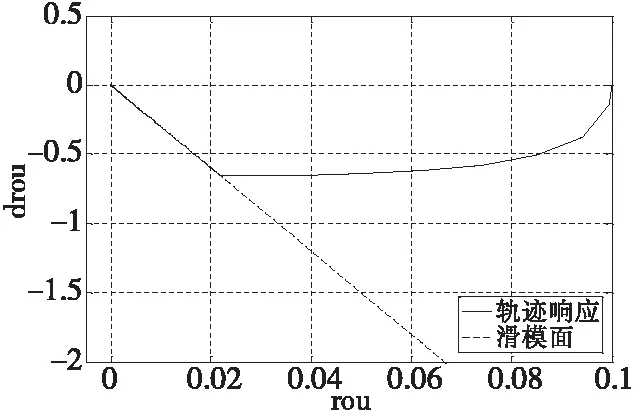
图5 相轨迹图
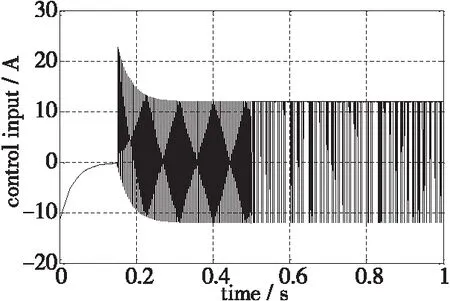
图6 输入控制量
(2)增益滑模+H∞扰动补偿控制的仿真结果
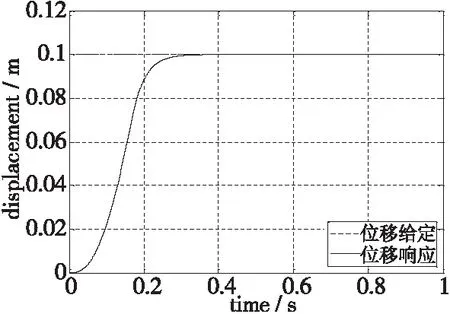
图7 阶跃位移响应曲线
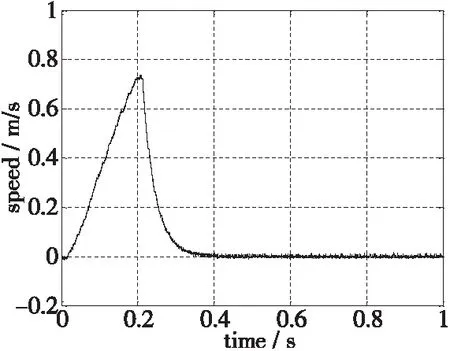
图8 速度输出响应曲线
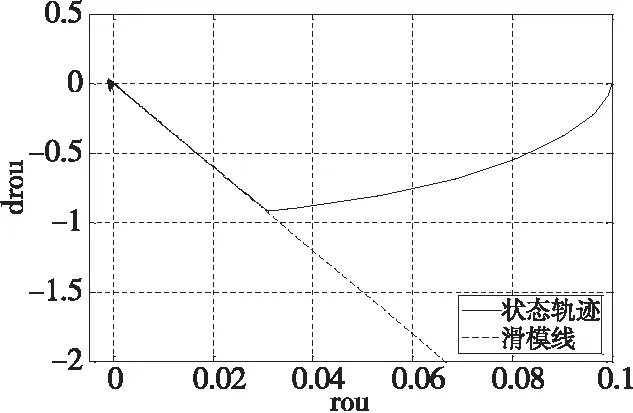
图9 相轨迹图
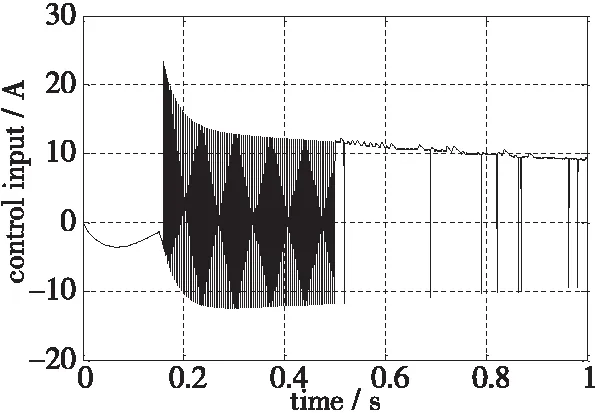
图10 输入控制量
对比图3和图7可见:仿真一的位移阶跃响应曲线中均有一定的抖振现象,且有稳态位置误差。仿真二则有效消除了抖振现象,且稳态位移响应无静差。对比图4和8可见:仿真一比仿真二不仅速度输出超调大而且稳态输出误差也大。由上述仿真结果可见,本文提出的加权积分增益滑模控制与H∞扰动补偿控制相结合的复合控制方法使永磁直线电机伺服系统具有良好的动态特性和跟踪精度,并且对内部参数摄动和外部非线性周期性推力扰动具有较强的鲁棒性。
4 结论
针对永磁直线电机伺服系统鲁棒控制问题,本文提出了基于加权积分增益滑模控制与H∞扰动补偿控制相结合的复合控制方法。为使直驱伺服系统具有良好的动态跟踪性能和极强的鲁棒性,本文提出了积分型切换滑模变结构控制器。为解决滑模线附近的控制抖振问题,采用了标准H∞控制理论设计了扰动补偿器。该复合控制方法有效降低了电机内部参数变化和推力波动对控制系统的影响。仿真结果表明所提出控制方法提高了系统的抗干扰能力,实现了永磁直线伺服系统的高精度、高品质的控制要求。
[1] 陈梁远,李黎川. 压缩机用直线电机及其关键技术发展综述[J].中国电机工程学报, 2013,33(15): 52-57.
[2] 仇健,张 凯,李鑫. 国内外数控机床定位精度对比分析研究[J].组合机床与自动化加工术,2013(8):1-4.
[3] 杨俊友,师光洲,白殿春.基于迭代学习的永磁直线伺服系统扰动抑制[J].组合机床与自动化加工术,2014(8):59-63.
[4] 李志军,刘成颖,孟凡伟. 质量波动对永磁同步直线电机控制器的影响及其补偿[J]. 中国电机工程学报, 2012,32(33): 67-76.
[5] 甄文喜,戴跃洪,唐传胜. 永磁同步直线电机伺服系统负载扰动建模与抑制[J].组合机床与自动化加工术,2003(2):19-24.
[6]AmitVilasSant,RajagopalKR.PMsynchronousmotorspeedcontrolusinghybridfuzzy-PIwithnovelswitchingfunctions[J].IEEETransactionsonMagnetics,2009, 45(10): 4672-4675.
[7]LiuHuixian,LiShihua.SpeedcontrolforPMSMservosystemusingpredictivefunctionalcontrolandextendedstateobserver[J].IEEETransactionsonIndustrialElectronics, 2012, 59(2): 1171-1183.
[8] 肖曙红,李锻能,张伯霖.直线电机高速进给系统性能优化研究[J].组合机床与自动化加工术, 2002(2):23-26.
[9] 魏胜.数控机床伺服系统原理分析与性能调整[J]. 组合机床与自动化加工技术,2010(5):81-85.
[10] 郭庆鼎,王成元,周美文,等.直线交流伺服系统的精密控制技术[M].北京:机械工业出版社,2000.
(编辑李秀敏)
Design for Permanent Magnet Linear Servo Controller Based on H∞Disturbance Compensator
WU Zhi-tao,LI Fu-yun
(School of Electric and Information Engineering, University of Science and Technology Liaoning, Anshan Liaoning 114051, China)
In order to meet high precision and high reliability required for the permanent magnet linear motor servo system, a method that combined sliding tracking mode controller and the H∞disturbance compensator is proposed. The weighted integral gain sliding mode controller effectively solves the problem of switching gain increase on non sliding mode phase. The H∞disturbance compensator effectively suppresses the effect of chattering sliding mode control in the linear motor servo control system and inhibited a variety of disturbances within the closed-loop system. The results of simulation show that the proposed method can make permanent magnet linear motor servo system have good dynamic performance, strong robustness and the insensitive to system parameter variations.
permanent magnet linear synchronous motor; H∞control; sliding mode control; disturbance compensator
1001-2265(2015)11-0067-04DOI:10.13462/j.cnki.mmtamt.2015.11.020
2014-12-22;
2015-01-20
辽宁省教育厅科学研究一般项目(L2015261);鞍山市科技一般项目
武志涛(1981—),男,辽宁鞍山人,辽宁科技大学讲师,博士,研究方向为新型特种电机及其控制,(E-mail)aswzt@163.com。
TH39;TG506
A
