基于FPGA的交流伺服系统高速数据传输的设计*
2015-10-31董烈超周凤星卢少武
董烈超,周凤星,卢少武
(武汉科技大学 信息科学与工程学院,武汉 430081)
基于FPGA的交流伺服系统高速数据传输的设计*
董烈超,周凤星,卢少武
(武汉科技大学 信息科学与工程学院,武汉430081)
针对交流伺服系统高速高精度的控制需求,设计了一种基于DSP和FPGA的高速数字控制器,并通过高速USB接口与上位机进行高速数据交互。以DSP为核心控制器,完成控制算法、SVPWM计算;以FPGA为辅助控制器,控制FT245RL高速USB通信模块,便捷实现以USB为接口的交流伺服系统与上位机之间实时数据的高速传输;上位机采用LabVIEW虚拟仪器技术编写,实时监测交流伺服系统运行状态,并对速度环控制参数进行自整定运算,将整定后的控制参数实时发送给数字控制器。实验结果验证,上位机监测实时准确,控制参数整定正确,交流伺服系统响应速度快、控制精度高、稳定性好,具有良好的实用性。
FPGA;交流伺服系统;数据传输
0 引言
随着数控机床的自动化程度越来越高,对伺服系统的控制动态特性和控制精度要求也越来越高。为了实现对交流伺服系统高速度、高精度和高稳态的控制,交流伺服系统需采用高性能数字控制器和优化的控制算法。由于速度环控制性能优劣也决定了交流伺服系统的最终性能,因此需及时整定速度环控制参数。
根据交流伺服系统的需求,设计了基于高精度定点DSP和FPGA的交流伺服系统数字控制器,并采用PI控制算法对交流伺服系统进行调节控制。数字控制器中采用FPGA控制USB控制芯片(FT245RL),实现交流伺服系统与上位机之间的USB高速通信[1]。上位机软件采用LabVIEW编写,利用其强大的数据运算分析性能,实时监测交流伺服系统的各个运行状态参量,并将实际转速以波形图显示在监测界面中,并完成对交流伺服系统速度环控制参数的整定运算[2];将整定后的控制参数通过USB接口发送到交流伺服系统控制器,确保交流伺服系统的速度环控制参数最优,从而保证交流伺服系统在不同环境下运行的稳定性和精确度。
本文介绍数字控制器的硬件结构和部分软件实现方法,并着重介绍FPGA控制USB接口模块的逻辑方案和上位机读取USB接口的程序设计。
1 伺服系统硬件结构
交流伺服控制系统的硬件部分主要包括上位机、USB接口模块、数字控制器和功率驱动器以及信号检测电路等,如图1所示。数字控制器由高速高精度DSP芯片TMS320F2812、FPGA及其外围电路组成;功率驱动器包括PWM开关和IPM逆变器;信号检测电路由电流检测电路和速度位置检测电路组成。
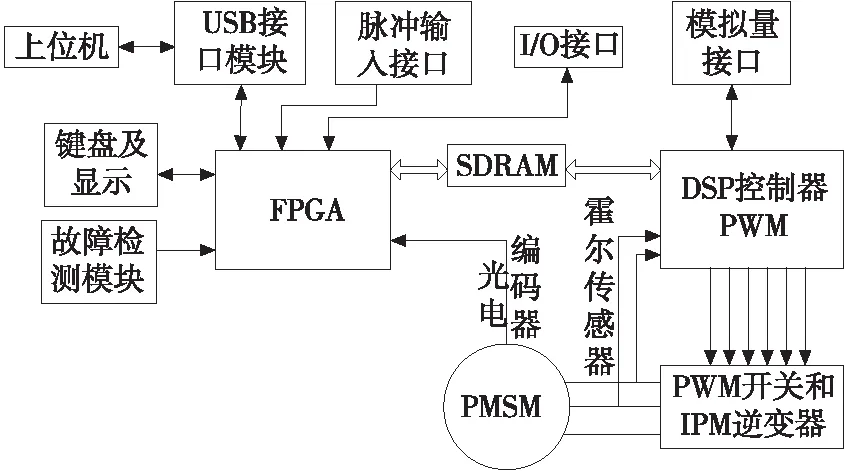
图1 伺服系统结构框图
1.1上位机
交流伺服系统中上位机采用LabVIEW软件编写上位机程序[3],通过读写USB接口,实现与数字控制器的高速通信,监测并记录交流伺服系统运行时反馈的各个状态参量。上位机执行复杂的速度环控制参数自整定算法,计算出当前工作环境下交流伺服系统的速度环最优控制参数,并通过USB接口将整定后的控制参数发送到数字控制器。
1.2数字控制器电路
交流伺服系统数字控制器主要由DSP和FPGA组成[4-5]。32定点DSP具有运算速度快、精度高的优点,能完成复杂控制算法的运算;而FPGA具有高速并行运算的优点。
根据FPGA和DSP各自的特点,将DSP作为核心控制器,主要完成电机两相电流反馈信号的采集,并完成复杂控制算法的运算,同时完成SVPWM矢量计算[6-7];将FPGA作为辅助控制器,主要完成USB接口控制、电机速度位置检测电路输出的脉冲信号的采集、键盘及显示模块的输入输出信号的电平转换和输入输出I/O信号的处理、位置指令脉冲信号的处理、故障检测模块中故障信号的检测。
DSP和FPGA之间采用SDRAM作为数据交互桥梁,实现数字控制器内部数据的高速交互,提高数字控制器的运算效率。
1.3USB通信接口电路
为了保证数字控制器和上位机通信的稳定性,本伺服控制器采用FPGA控制USB控制芯片FT245RL,充分利用FPGA并行运算的优点和FT245RL控制的高速稳定特性[8-9],实现数字控制器与上位机之间高速稳定数据交互,其电路原理图如图2所示。FT245RL的主要性能特点:实现USB接口与并行FIFO缓存区的高速双向数据传输、片内具有完整的USB协议解决方案,无需复杂的底层固件的编程,使硬件电路设计便捷可靠。
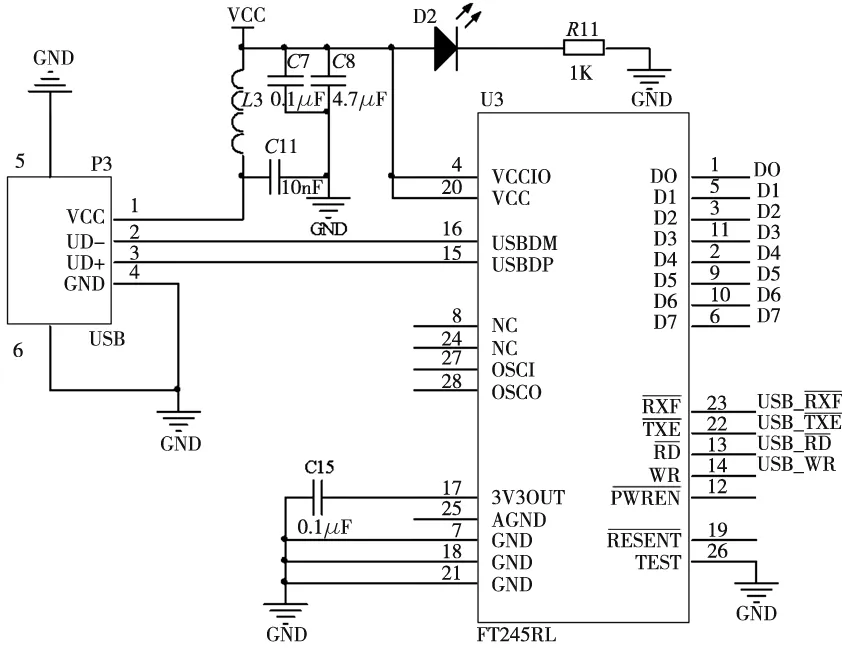
图2 FT245RL与FPGA的电路原理图

1.4信号检测电路
电流检测电路通过霍尔电流传感器采集的两相电流信号,电流信号经过滤波、偏移量调整、幅值调整等一系列的处理后输入到DSP的A/D采样电路接口。由于所采用的永磁同步电动机为星型连接,故检测转子电流时只需检测两相电流,并可计算得出第三相电流。
速度位置检测电路采用的位置传感器为混合型光电编码器。混合型光电编码器输出两组信息:一组信息为A、B和Z相脉冲,用于传输电机的转速信息;另一组信息为U、V、W,用于检测磁极位置。混合型光电编码器具有传输稳定,抗干扰能力强的优点,适用于环境恶劣的场合。
2 伺服系统软件设计
本系统软件设计主要包括三部分: DSP控制程序、FPGA逻辑控制程序和上位机LabVIEW程序。
2.1DSP控制程序
DSP作为数字控制器的核心控制器,其程序主要由主程序和中断服务子程序组成。主程序主要完成系统的初始化、GPIO口初始化、各个控制寄存器的设置、时钟设置、中断向量表初始化、开中断等。中断服务子程序包括定时器下溢中断和捕获中断。其中定时器下溢中断程序为控制系统的核心部分,其运行的效率直接决定了整个控制系统的实时性和控制性能。在该中断程序中,DSP周期性的读取电流检测电路反馈的两相电流值和FGPA采集的转速计数值以及上位机下传的控制指令和整定后的速度环控制参数,并执行位置环、速度环和电流环的PI控制算法、坐标变换和SVPWM波形生成。
2.2FPGA逻辑控制程序
FPGA作为辅助控制器,主要完成SDRAM数据读写控制、USB接口模块控制、电机速度位置检测电路输出的脉冲信号的采集、键盘及显示模块的输入输出信号的电平转换和输入输出I/O信号的处理、位置指令脉冲信号的处理、故障检测模块中故障信号的检测。FPGA程序采用VHDL语言编写。
FPGA定时采集速度位置检测电路的信号,并计算出转速计数值,通过SDRAM向DSP发送电机的实际转速计数值和上位机下传的控制指令、整定后的速度环控制参数。

图3 FT245RL的读时序

图4 FT245RL的写时序
由于FT245RL为8位数据端口,每次操作只能读写八位数据,而交流伺服系统运行时的每组状态参量有多个量。为了保证每组状态参量传输的准确性,FPGA需对采集到的每组状态参量进行整合组帧操作,将每组状态参量组成一帧数据,并且对每帧数据添加帧头和帧尾,便于上位机对数据的准确识别和解析每组状态参量。
2.3上位机LabVIEW程序
上位机主要功能是接收USB接口的数据,并对接收到的数据进行解析,提取交流伺服系统的运行状态参量,通过信号处理程序将实际转速以波形图显示在界面中,直观展示交流伺服系统当前的运行状况,并通过执行速度环控制参数自整定程序对交流伺服系统的控制参数进行整定[10],将整定后的速度环控制参数通过USB接口发送到伺服系统数字控制器,提高伺服系统的稳定性。
本系统的上位机软件采用LabVIEW虚拟仪器技术编写。FTDI公司提供了FT245RL的完整D2XX驱动程序开发所需LabVIEW函数库,通过调用这些库函数,上位机可以准确完成对FT245RL的读、写操作。
上位机调用FT_Get_Device函数获取当前USB接口设备的连接情况,选择FT245RL所对应的USB接口;确定接口后,再调用FT_Open_Device函数使能USB接口设备,上位机与USB接口设备建立通信;上位机程序判断是读USB设备数据或向USB设备写数据。
当为读USB设备数据时,上位机检测到数据帧的帧头标记后,从帧头开始接收数据并写入缓存器,当检测到帧尾标记时停止写入缓冲器;一帧数据接收完成后,再对数据进行解析,将解析后的数据按设定格式写入存储区,保证数据传输的准确性。当为向USB设备写数据时,上位机按设定格式下传指令数据。上位机读写FT245RL的软件流程图如图5所示。
3 实验测试及验证
本伺服系统中使用的FPGA芯片采用Altera公司的EP2C8Q208C8芯片,DSP控制芯片采用的TI公司的32定点DSP芯片TMS320F2812,上位机为高性能工控机。永磁同步电机的参数:额定电流5.5A、额定转速2000 r/min、转矩4.5Nm。
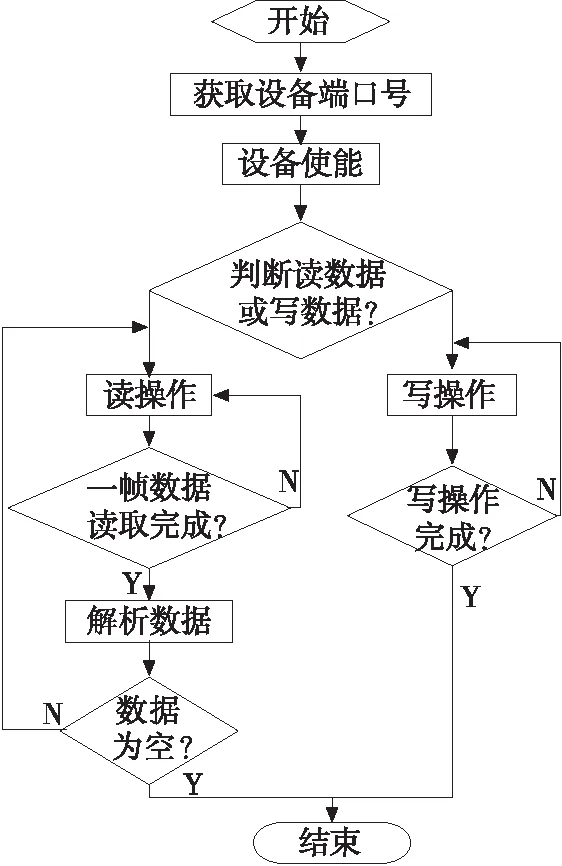
图5 上位机读写流程图
上位机在控制界面的转速指令输入口设定电机转速为300r/min;FT245RL的USB接口连接在上位机的1号端口,所以USB接口选择1口;指令设置完毕后,点击控制界面的启动按钮。
为了验证交流伺服系统数字控制器的控制效果,数字控制器采集的电机实时转速和参考电流信号,数字控制器通过USB接口发送给上位机。上位机接收并解析每帧状态参量,并将电机的实际转速以波形形式实时的显示在控制界面中。上位机根据接收的状态参量,执行速度环控制参数自整定程序,其中自整定程序采用文献[10]中提出的结合最小二乘法和遗传算法的伺服系统控制参数自整定算法,计算出当前工作环境下伺服系统的最优控制参数,并将整定后的参数以指令方式下传给数字控制器。
整个测试过程中,上位机通过USB接口模块,实时监测伺服系统的运行情况,监测结果实时准确。其中图6所示为初始控制参数控制下电机的实际转速,图7所示为速度环控制参数整定后电机的实际转速。实验结果显示:上位机稳定监测交流伺服系统的运行状态,并且经过速度环控制参数自整定算法整定后的速度环控制参数,提高了交流伺服系统的控制性能,使数字控制器伺服系统响应速度快、控制实时性好、超调量较小、具有较小的静差率和良好的抗干扰能力。
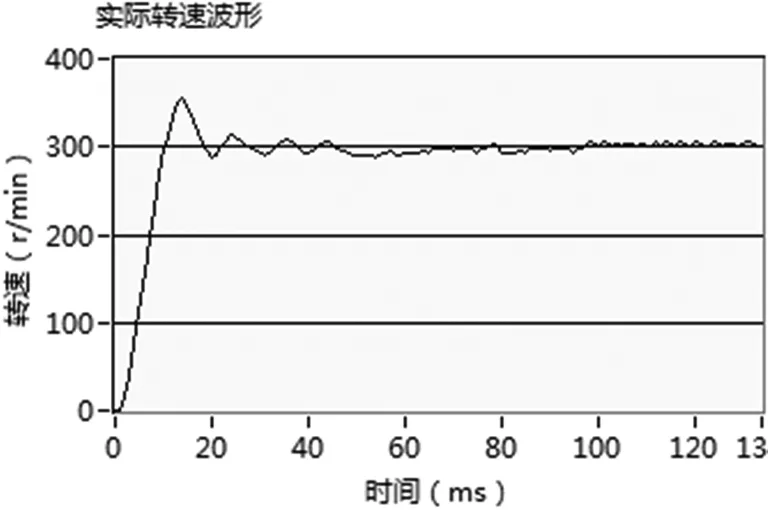
图6 初始控制参数控制时电机转速波形
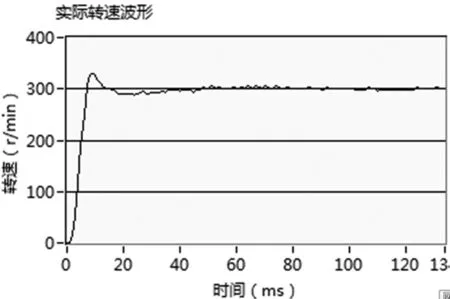
图7 速度环控制参数整定后电机转速波形
4 结论
本文所设计的基于FPGA的伺服高速数据传输系统,充分利用DSP和FPGA各自的特点,使数字控制器运算速度快、控制实时性好、控制精度高,并且采用USB接口与上位机进行高速数据交互,上位机实时监测伺服系统的运行性能,根据电机反馈的状态参量整定速度环控制参数,提高了交流伺服系统运行时的控制精度和稳定性。系统运行结果表明,USB接口模块工作稳定,交流伺服控制系统控制性能好,在不同工作环境具有良好的稳定性和通用性。
[1] 袁宝红,付奎,张德祥.基于FPGA和LabVIEW的USB数据采集与传输系统[J].仪表技术与传感器,2013(9):24-27.
[2] 曹宇,李叶松.伺服系统特性测试分析平台设计[J].微电机,2013,46(10):78-83,86.
[3] 杨乐平,李海涛,杨磊.LabVIEW程序设计与应用[M].北京:电子工业出版社,2005.
[4] 李乐,熊志辉,王斌,等.DSP+FPGA折反射全景视频处理系统中双核高速数据通信[J].电子与信息学报,2010, 32(3): 649-654.
[5] 邓永停, 李洪文, 王建立,等. 基于DSP和FPGA的望远镜伺服控制系统设计[J]. 红外与激光工程, 2014(3): 908-914.
[6] 苏奎峰, 蔡昭权, 吕强,等. TMS320X281X DSP应用系统设计[M]. 北京: 北京航空航天大学出版社, 2008.
[7] 卢铁斌, 李春江, 章跃进,等. 基于DSP的永磁同步电机伺服系统矢量控制研究[J]. 微电机, 2010, 43(12): 34-38.
[8] 黄汉霞, 何平, 王志成. 基于Labview与USB的嵌入式伺服系统的数据监测[J]. 组合机床与自动化加工技术, 2011(12): 35-39.
[9] 凌伟, 杨燕娇. 基于FPGA和FT245的芯片功能测试装置的设计与实现[J]. 科学技术与工程, 2012, 12(36): 9976-9979, 9999.
[10] 郑世祺, 唐小琦, 卢少武,等. PMSM伺服系统参数自整定研究[J]. 电气传动, 2013, 43(3): 10-13, 17.
(编辑李秀敏)
Design of High-speed Data Transmission AC Servo System Based on FPGA
DONG Lie-chao, ZHOU Feng-xing, LU Shao-wu
(College of Information Science and Engineering, Wuhan University of Science and Technology, Wuhan 430081,China)
According to the control demand of AC servo system with high speed and high precision, a digital controller based on DSP and FPGA was designed and the high-speed USB interface as the means of interaction between the AC servo system and PC. A DSP was used as core controller to complete computing the control algorithm and SVPWM. A FPGA was used as auxiliary controller to control the high speed USB module of FT245RL, the PC and servo system with the USB interface have efficiently realized high speed real-time data interaction. The parameter data of the AC servo system was monitored and analyzed by LabVIEW virtual instrument in PC. The PC executed the speed loop auto-tuning algorithm and sent the tuned control parameter to the digital controller through USB. The experimental results verify that the PC monitor real-time and accurate, control parameter tuning correct, the AC servo system has high control precision, stability. The system has good practicality.
FPGA; AC servo system; data transmission
1001-2265(2015)11-0061-04DOI:10.13462/j.cnki.mmtamt.2015.11.018
2014-12-23;
2015-01-22
国家自然科学基金项目(61174106);国家自然科学基金项目(51405349);中国博士后科学基金项目(2014M552091)
董烈超(1990—),男,湖北荆门人,武汉科技大学硕士研究生,研究方向为伺服控制和FPGA嵌入式, (E-mail)15002705683@163.com。
TH166;TG506
A
