基于水动力性能的TLP结构选型研究
2015-10-30钱佳煜孙丽萍宋林峰
钱佳煜,孙丽萍,宋林峰
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
基于水动力性能的TLP结构选型研究
钱佳煜,孙丽萍,宋林峰
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
为了解决四种典型结构型式的张力腿平台在中国南海荔湾气田极端海况条件下的选型问题,采用新的相似原则以保证平台的设计拥有相同的相似条件。这些相似条件确保了四种平台具有相似的水动力性能和系泊性能。考虑平台和系泊系统包括顶张紧式立管(TTRs)、钢悬链式立管(SCRs)及筋腱之间的耦合效应,运用动态时域耦合分析方法计算得到平台的动力响应,并通过对比不同结构型式的平台在作业、极限及生存工况下的运动响应以得到最优水动力性能平台。文中还分别对四种张力腿平台的动态响应、筋腱受力、气隙分析和动晕环境条件进行对比分析,分析结果为实际工程提供参考。
张力腿平台;平台选型;水动力响应;气隙分析;动晕环境条件分析
中国南海拥有丰富的油气资源,其中荔湾气田位于香港以南约300公里处,水深为1 500 m。根据南海实际环境条件,我国南海深水油气田浮式钻采平台选型给出如下建议:在1 500 m以内的深水范围应以张力腿平台或半潜式平台作为首选[1]。为开发荔湾3- 1气田及其周围潜在的油气储备,对于南海张力腿平台的选型研究显得十分迫切。
张力腿平台最显著的特点是靠筋腱来系泊平台,筋腱始终保持受拉状态,而且张力必须保证不能低于一定数值,预张力则由平台浮体的剩余浮力提供,因此其对上部载荷的变化是敏感的。由于张力腿平台(Tension Leg Platform- TLP)的系泊方式决定了平台在平面外的横摇、纵摇、垂荡等运动近于刚性,而在平面内的横荡、纵荡、首摇等运动显示出柔性,环境载荷由平面内运动的惯性力而不是结构内力来平衡。张力腿长度与水深成线性关系,而且筋腱造价较高,水深一般限制在2 000 m之内。TLP有四种类型,分别是传统式张力腿平台(Conventional Tension Leg Platform- CTLP)、延展式张力腿平台(Extended Tension Leg Platform- ETLP©)、MOSES©平台和SeaStar©张力腿平台。CTLP具有四根由四个浮筒相互连接的立柱。ETLP的结构与CTLP相似,但在结构上做了一些改进,ETLP的每个立柱都增加了延伸的浮箱。MOSES平台是由MOSES公司设计研发,其平台的立柱更集中于平台的中心,四根浮箱用来连接基座和筋腱。SeaStar TLP从顶部向下看因形似海星而命名,由单根垂直的立柱和三个矩形截面的浮箱组成。
四种典型结构型式的TLP具有不同的动力响应。很多学者基于不同的相似准则研究了结构型式对平台运动响应的影响。S.Chandrasekaran[2- 3]采用相同的排水量原则,对一座三立柱TLP和四立柱TLP的运动响应进行比较分析。Sun LP[4]基于相同排水量的原则,对比了SPAR平台、张力腿平台和半潜式平台的运动响应。李牧[5]比较三种典型结构型式的半潜式平台,保证其具有相同的上部结构,并且平台的立柱和浮箱排水量相同。欧进萍[6- 7]比较了四种型式的TLP,相似准则为平台具有相同的吃水和上部甲板模块。
因四种张力腿平台的结构型式不同,其所受到的水动力作用也不相同。除了使四种平台具有相同的排水量和甲板重量外,还需要考虑多种因素,如:荔湾气田井口因分散而需要SCR立管输送,则MOSES平台应选用第二代MOSES平台(深吃水);SeaStar平台的筋腱数目少于其他三种平台,所以需设定四种平台的总筋腱刚度相似等条件。根据荔湾气田的环境条件和相似条件,本文设计了四种不同结构型式的TLP,完成四种不同结构型式TLP的选型并对其进行总体性能分析。为了评估运动性能是否满足设计要求,在风、浪、流的联合作用下,采用动态时域耦合分析的方法对TLP系统进行了分析计算。对平台运动的研究考虑了顶部张紧式立管(TTRs),钢悬链式立管(SCRs)以及筋腱与平台主体间的耦合效应。通过对比其筋腱受力以得到最优系泊动力特性平台;通过对比气隙分析、筋腱数目以得到最优经济性平台;通过动晕环境条件分析得到最适宜人员操作平台;上述数据为张力腿平台在南海海域的结构选型,特别在水动力性能方面提供必要的参考依据。
1 数值模拟
1.1TLP系统动态时域耦合分析方法
TLP系统在环境载荷作用下的总体动力响应受多种非线性因素影响,这些因素包括非线性水动力载荷(非线性曳力、自由表面影响和二阶波浪载荷)、非线性系泊和立管恢复力、大幅度的纵/横荡运动、大幅度的首摇运动和波浪漂浮阻尼等。因此要获得系统准确的总体响应必须采用动态时域耦合分析方法来考虑各种非线性因素的影响。
基于三维辐/绕射理论,通过频域计算得到TLP的水动力系数以及一阶、二阶波浪力;将频域分析得到的波浪激振力和辐射水动力系数应用于时域模拟分析中,进而得到TLP在时域中的波浪激振力、ω趋于无穷大时的附加质量μ(∞)和时延函数K(t)。平台慢漂阻尼采用Newman近似,平台的时域运动方程如下:
[M+μ()](t)+(τ)K(t-τ)dτ+Bη(t)=Fwave(t)(1)
时域分析中平台的辐射力用时延函数的卷积积分来表示,对于随机激励(如随机海浪)的响应,在求解运动方程时不用对高低频单独考虑,完全可以计入高低频之间的相互影响,是一种更加恰当的处理方式。在零航速下,阻尼系数和时延函数有如下性质:
1)ω=0或ω→∞,B(ω)=0
2)t→∞,K(t)=0
3)μ(∞)是ω→∞时的附加质量,μ=A(∞),不随频率而变化。
在计算K(t)和μ(∞)时,附加质量A(ω)和阻尼系数B(ω)可用比较成熟的水动力计算软件获得,而计算K(t)和μ(∞)时需要计算整个频率域内B(ω),因此如何做阻尼系数的截断处理是关键,否则数值误差势必影响后续时域波浪力和波浪载荷预报[8]。本文中采用计算高频振荡Flion积分来逼近B(ω),从而得到平台的波浪辐射力。
1.2荔湾气田环境条件
荔湾气田坐落在中国近海较偏远位置,其水深达到1 500 m,位于香港/维多利亚以南约300 km处。荔湾3- 1包含珠江口流域合同区域29/26附近的开采区。本文分别选取作业工况、极限工况和生存工况作为计算平台运动响应的三种环境条件,风、浪、流的具体参数如表1所示。其中,环境力方向为风、浪、流同向,假设流为定常剪切流,并且在给定值之间进行线性变换。风载荷采用NPD风谱模拟,作用于水平面以上10 m处。

表1 荔湾3- 1环境条件Tab. 1 Environment condition of Liwan 3- 1 area
1.3不同结构型式的TLP相似条件
不同结构型式的TLP平台差别很大,本文所选择的相似条件一部分基于其他学者[2- 6]的研究经验:1)相同的上层甲板质量和设计排水量;2)四种平台的浮筒和立柱保持相同的排水量。在此基础上,与实际相结合适当加入一些其他的相似条件:3)由于不同的平台结构型式相差较大,设计过程中尽量保证CTLP和ETLP底面积相似,而MOSES和SeaStar的底面积相近,以确保不同平台的垂向附加质量和阻尼具有一定的相似性;4)荔湾气田开采过程中的井口布置,须采用钢悬链式立管(SCRs)进行输送,建议采用第二代MOSES TLP(有深吃水的特性),因此依据Marco Polo TLP的设计参数,二代MOSES TLP的吃水为37m;5)为了使平台的动力响应具有可比性,应保证四种平台的纵荡、横荡和垂荡响应幅值相近;6)使四种平台张力腿的总拉伸刚度相同以确保平台在水平方向上的运动相似。SeaStar平台的筋腱采用3×3方式布置,由于其筋腱的数目少于其他三种平台,因此SeaStar筋腱的直径和厚度要大于另外三种型式的张力腿平台。
时域耦合动态拟合分析中筋腱对平台视为刚性作用。筋腱刚度方程如下:
式中:EA表示筋腱总刚度,L表示筋腱长度。
根据同样的相似条件确定四种平台的主尺度,具体参数如表2所示;由以上相似条件得到四种平台的主尺度,具体参数见表3;表4为四种平台的固有周期;对四种典型的张力腿平台进行面元划分并按照不同的结构型式加装TTR和SCR立管,如图1~图4所示。

表2 四种平台主尺度Tab. 2 Principal dimensions of four platforms

表3 四种平台详细参数 m

表4 结构固有周期 s

图1 传统型张力腿平台Fig. 1 Model of CTLP
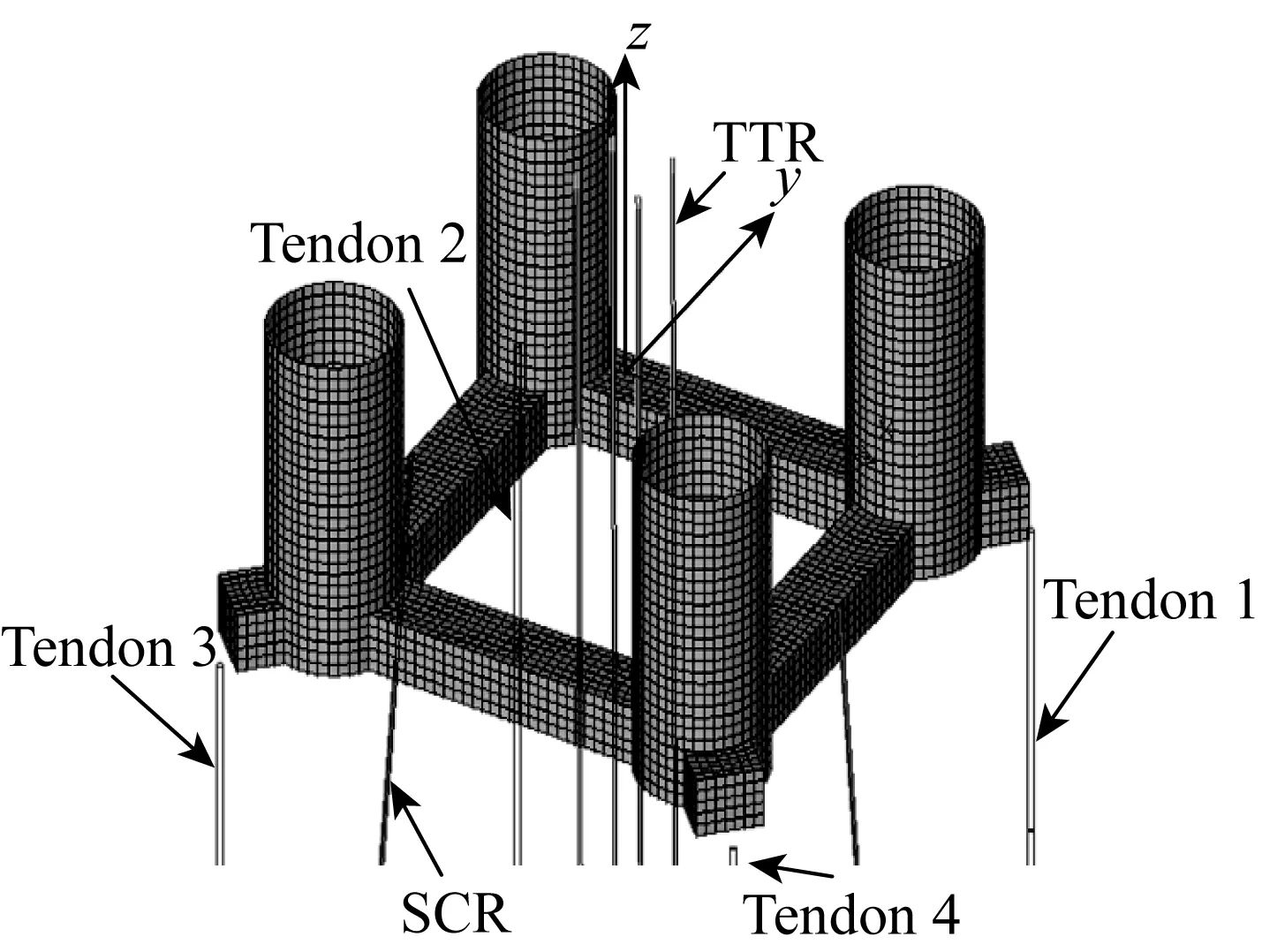
图2 延展式张力腿平台Fig. 2 Model of ETLP

图3 MOSES张力腿平台Fig. 3 Model of MOSES

图4 SeaStar张力腿平台Fig. 4 Model of SeaStar
2 结果与讨论
2.1动力响应分析
根据频域计算所得的水动力系数和波浪力,应用傅里叶变换和卷积积分理论可以得到辐射力、衍射力、以及F-K力的记忆函数。在时域分析中通过求解运动方程得到平台的运动响应。运动响应的极值是评价平台能否适用于该水域开采的重要指标。
通过时域耦合动态模拟分析,得到了四种平台在作业工况、极限工况以及生存工况下的纵荡和横荡运动响应最大值,如图5所示。考虑到南海的海况特征,风和流对于平台的影响不可忽略。通常在初步设计阶段,张力腿平台的运动幅值最好不超过其在位水深的5%[9],根据计算结果可知,通过相似准则得到的张力腿平台满足设计在位要求。特别指出的是,SeaStar平台在作业工况下的运动响应较优,而在极限工况下的运动响应增加显著。
图6中的四条曲线分别表示四种张力腿平台在作业工况下沿X方向的运动幅值,相应的平均运动幅值分别为19.84,20.60,20.9和20.89 m。RMS分别为2.90,3.025,1.377和1.636。通过对比,可以看出四种平台在作业工况下的平均幅值相近。从RMS值来看CTLP和ETLP的振荡幅值大于其他两个平台,同时MOSES和SeaStar平台的最大运动幅值比CTLP和ETLP小得多。
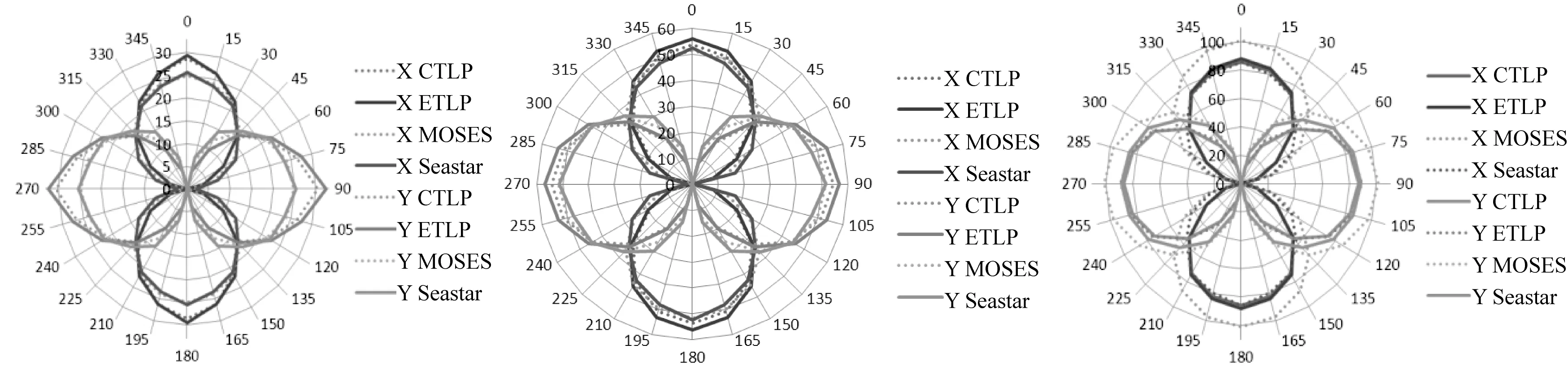
图5 作业工况、极限工况、生存工况下的最大纵荡横荡位置Fig. 5 Max surge/sway positions under operation condition, extreme operating condition and extreme design condition

图6 平台在X方向的运动响应Fig. 6 Motion of the platforms in X direction
2.2筋腱分析
对TLP进行评估的另一个重要标准是筋腱张力是否能够满足要求[10]。筋腱使用X65钢材,屈服强度为448 MPa,极限应力为530 MPa。根据API RP 2T规范,安全系数可以根据利用率来判断。该利用率可以通过公式(3)计算得到。

式中:UR=利用率,σa=轴向应力,σb=总体弯曲应力,σy=屈服应力,σu=极限应力。

表5 安全准则Tab. 5 Safety category
表6~表8为最大受力筋腱分别在0°至90°环境力入射角度下不同工况的利用率系数值。
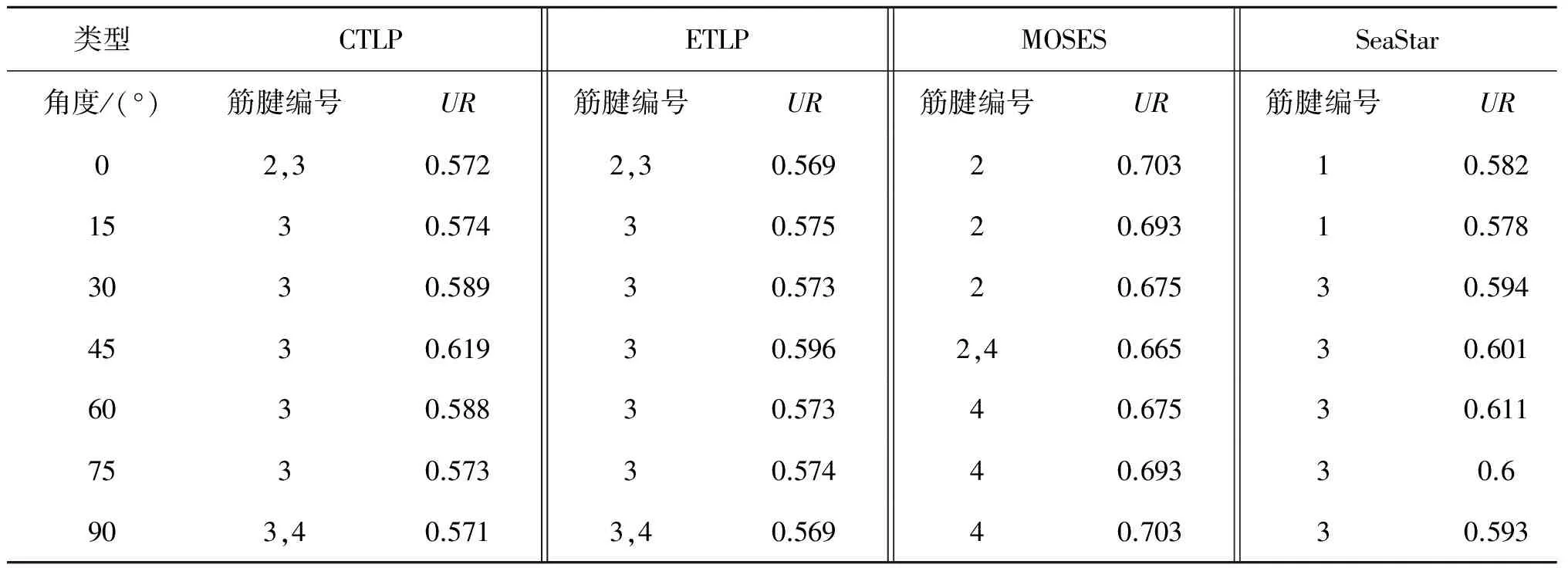
表6 作业工况下筋腱UR值Tab. 6 UR of the tendons under operation condition

表7 极限工况下筋腱UR值Tab. 7 UR of the tendons under extreme operating condition

表8 生存工况下筋腱UR值Tab. 8 UR of the tendons under extreme design condition
Moses和SeaStar浮体建造钢材用量较少,所以这两种平台的总预张力要大于另外两种平台。表6~表8表明在作业工况和极限工况条件下SeaStar的筋腱受力最小,MOSES的筋腱张力为最大。但在生存工况下,SeaStar的筋腱张力迅速增大而MOSES的增长缓慢。由此证明SeaStar的筋腱在恶劣海况下较为脆弱。从表6~表8中得知最大受力筋腱通常为迎浪的那根。

图7 生存工况下筋腱等效应力Fig. 7 Von mises stress of the tendons under extreme operating Condition
图7可以看到在生存工况下筋腱的等效应力。CTLP和ETLP的最大张力出现在入射波方向为45°时的3号筋腱上;同时SeaStar的3号筋腱在入射波方向为60°时受力最大。筋腱的平均等效应力分别为1.247E7、1.252E7、1.400E7和1.697E7 N/m,由此看出CTLP和ETLP的筋腱应力小于其他两种平台。但是SeaStar采用了3×3的系泊方式,另外三种采用4×3的方式,从经济性来考虑,SeaStar平台使用了9根筋腱,比其他三种平台少3根筋腱,筋腱的数目对平台各自由度运动无显著影响[11],所以在经济性比较占优势。
2.3气隙分析
张力腿平台除了校核其运动以及筋腱所受张力的最大最小载荷外,平台的气隙校核也是十分重要的指标之一,即校核在极限环境下平台在最大波浪作用时的空隙(即平台上部结构底部与波峰之间的距离,正常要保证上部结构不进水)。目前工程界较为常用的方法是在平台甲板底部定义多个节点来考虑平台受力。考虑到波浪爬升的原因,通常定义节点围绕于各个立柱的四周。

表9 极限工况下各个平台的气隙校核Tab. 9 Air gap of different types of TLP
平台的气隙校核具体结果如表9所示,证明四个平台皆满足要求,即气隙最小值大于零。通过对平台的气隙分析发现,气隙最小的平台为CTLP平台,最小的气隙值达到了2.813 m,而最大的气隙平台为SeaStar平台,最大气隙为3.211 m,由于没能考虑到波浪的非线性原因,实际气隙会小于计算值,但还有继续优化的可能。
2.4动晕环境分析
平台甲板通常是平台人员工作和生活的主要场所,甲板上的加速度大小影响操作人员的工作效率与操作质量,为了尽可能的减少对人产生的不舒适感觉,平台甲板的加速度分析是十分必要的。本节对平台甲板处的生活区和工作区取多个关键点,对这些关键点进行了加速度分析,以考校四种张力腿平台在不同环境下人员的舒适度。评校标准根据国际规范NORDFORSK规范[12],如表10所示。

表10 动晕环境条件Tab. 10 Criteria for susceptibility to seasickness
通过对表11进行数据分析,四种平台的运动状况良好,可以在较大的风浪流环境下保证人员的驻留并进行简单的操作作业。对比四种不同结构类型的张力腿平台,其中MOSES和SeaStar平台的水平和垂向加速度RMS值较小,相对的CTLP和ETLP的水平和垂向加速度RMS值较大。其中,平台甲板最大的水平加速度RMS值为0.762 m2/s,最大垂向加速度RMS值为0.372 m2/s,均较小且满足规范要求。研究发现张力腿平台的水平运动动晕条件较差,这是由其系泊特性导致的。

表11 平台的动晕环境条件Tab. 11 Susceptibility to seasickness of TLP
3 结 语
本文根据新的相似条件对四种不同结构型式的张力腿平台的水动力响应进行了对比分析,使用时域动态非线性耦合方法在四个方面对张力腿平台进行了对比分析,分别是:运动响应、筋腱受力、平台气隙分析和动晕环境条件。可以得到以下结论:
从运动响应性能方面的对比分析发现,相比其他三种平台,较小的受风面积和水线面面积使SeaStar平台在工作海况下具有良好的动力响应,但在极限工况下运动响应增加明显;从筋腱动力性能分析发现:ETLP筋腱张力最小,SeaStar与CTLP次之,MOSES张力最大,且在极限工况下,SeaStar筋腱受力增加明显,但相比其他三种平台,SeaStar浮体建造用钢量少、而且筋腱数目少,SeaStar平台在经济性上略有优势;由气隙分析和动晕环境条件分析得到,SeaStar和MOSES优于CTLP与ETLP,能够有效避免波浪抨击,同时更大程度上保证人员舒适性和平台的可操作性。结合以上分析,TLP平台在荔湾气田的最终选型受建造、安装、拖航、在位等工况制约,同时也受项目建造和安装的经济性制约,以及结构的总体可靠性制约,所以TLP平台结构最终方案选型的确定需综合考虑。
[1] BIN X, AIXIA Z. Engineering mode and platform selection for deepwater oilfield development in South China Sea[J]. ACTA Petrol Science, 2007, 28 (1): 115- 118.
[2] CHANDRASEKARAN S, JAIN A K. Dynamic behavior of square and triangular offshore tension leg platforms under regular wave loads [J]. Ocean Engineering, 2002, 29: 279- 313.
[3] CHANDRASEKARAN S, JAIN A K, GUPTA A. Influence of wave approach angle on TLP’s response [J]. Ocean Engng., 2007, 34: 1322- 1327.
[4] DONG Y Q, SUN L P. Comparison study of different floater effect on deepwater SCR[C]//OMAE International Conference on Ocean, Offshore and Arctic Engineering. Portugal, 2008: OMAE 2008- 57964.
[5] 李牧. 南海张力腿平台优化选型研究[D].天津:天津大学,2010. (LI Mu. Optimum selection of tension leg platform based on South China Sea [D]. Tianjin: Tianjin University, 2010. (in Chinese))
[6] YAN Gongwei, OU Jinping, Dynamic response analysis on different types of TLPs[C]//OMAE International Conference on Ocean, Offshore and Arctic Engineering. Shanghai, 2010.
[7] LI Binbin, LIU Kun, OU Jinping. Hydrodynamic comparison of a semi- submersible, TLP, and Spar: numerical study in the South China Sea [J]. Environment Journal of Marine Science and Application, 2011, 10:306- 314.
[8] TRISTAN P′EREZ, THORL FOSSEN, Time- vs. frequency- domain identification of parametric radiation force models for marine structures at zero speed[J]. Modeling, Identification and Control, 2008, 29(1):1- 19.
[9] SURBRAKA K, CHAKRABARTI. Handbook of offshore engineering [M]. Elsevier Science Ltd., 2005: 500- 501.
[10] 安光伟, 陈燕, 孙克淋. 基于检测结果的海洋工程结构TLP系索系统疲劳可靠性分析[J].哈尔滨工程大学学报, 2004(6): 700- 704. (AN Guangwei, CHEN Yan, SUN Kelin. Fatigue reliability of TLP tendon system based on inspection [J]. Journal of Harbin Engineering University, 2004(6): 700- 704. (in Chinese))
[11] 宋林峰,孙丽萍,赵君龙,等.张力腿平台系泊系统敏感性分析[J].中国造船,2012(4):109- 117. (SONG Linfeng, SUN Liping, ZHAO Junlong, et al. A Sensitive analysis of mooring system of tension leg platform [J]. Journal of Shipbuilding of China, 2012(4):109- 117. (in Chinese))
[12] DNV- OS- E301. Position mooring[S]. Norway: Det Norske Veritas, 2004.
Structure type selection of TLPs based on hydrodynamic performance
QIAN Jiayu, SUN Liping, SONG Linfeng
(College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
In order to find which of four typical Tension Leg Platforms is more suitable for the Liwan field in the South China Sea, this study chooses one based on the assumption of similarity principle to ensure that the four platforms have the same similarity criteria in the design. These similarity principles are used to ensure that these four platforms have similar hydrodynamic response and mooring property. In the time domain simulation, the interaction between the platform and the mooring system is considered, in terms of TTRs, SCRs and tendons. In order to provide references for engineering application, the dynamic response, tendon tensions, air gap analysis and susceptibility to seasickness are compared.
tension leg platform; optimum selection; hydrodynamic response; air gap analysis; susceptibility to seasickness
P751
A
10.16483/j.issn.1005- 9865.2015.05.013
1005- 9865(2015)05- 097- 08
2014- 06- 04
黑龙江省科学基金会资助项目(QC2014C049); 中央高校基本科研业务费专向资金资助项目(HEUCFD1402,HEUCFD1424); 国家高等学校学科创新引智计划资助项目(B07019); 高等学校博士学科点专项科研基金新教师类资助课题(20132304120008)
钱佳煜(1988- ),女,江苏南通人,博士研究生,从事船舶与海洋工程浮式平台水动力研究。E- mail:qianjiayu1126@126.com
孙丽萍。E- mail:sunliping@hrbeu.edu.cn