电液舵机控制系统设计及软件仿真分析
2015-10-29舒冠柏
舒冠柏 袁 媛
(1.湖北饭店有限公司,湖北武汉 430071;2.空军预警学院三系,湖北武汉 430019)
电液舵机控制系统设计及软件仿真分析
舒冠柏1袁媛2
(1.湖北饭店有限公司,湖北武汉430071;2.空军预警学院三系,湖北武汉430019)
电动液压舵机系统是现今使用最多的舵机系统,其许多优点促进了电动液压舵机的普及,其液压和控制系统也是船舶上非常重要的船舶运动控制系统。本文主要针对操舵系统进行研究。建立了变量泵排量控制系统和操舵系统的模型,并完成了随动系统的传递函数,最后在此基础上利用AMEsim软件对随动系统进行仿真分析,利用经典PID控制设计了随动系统的控制器。
液压舵机系统控制系统设计仿真
1 引言
船舶在应用液压传动之前,采用的是蒸汽传动和电气传动。1916年美国在“新墨西哥”号战舰上首次使用了液压舵机。经过一段时间发展,l981年国际海事会议正式通过了对l974年SOLAS公约的修正案,其中对舵机的要求提出了重要的新条款。进入八十年代以来,世界舵机主要制造厂家都开始认真检查其产品,并按1981年修正案的要求重新设计各自的舵机,力争在市场上保持较大的竞争优势。新一代的舵机的性能和可靠性更趋完善。目前国外舵机最新变化动向如下。(1)普遍设置了两套液压系统;(2)电控液压型舵机的应用功率范围在扩大,性能也在改善。
本文主要针对随动系统进行研究。建立了变量泵排量控制系统和操舵系统的模型,并完成了随动系统的传递函数,最后在此基础上利用AMEsim软件对随动系统进行仿真分析,利用经典PID控制设计了随动系统的控制器。
2 操舵系统的传递函数模型
电液舵机原理参文献[1]。根据计算的柱塞缸行程与舵角的关系,在舵角范围内,舵角和柱塞缸行程的关系为

式中sKδ——舵角与柱塞缸行程的线性增益,m/°
δ——舵角,rad
舵角位移传感器的频响很高,可以看成比例环节,即

式中fK——舵角位移传感器的放大系数,V/rad
Uf——舵机位移传感器的输出电压,V
根据以上环节的传递函数及动力机构和变量泵系统的模型[2,3,4],可以得到操舵系统的控制系统原理图如图1所示。
从图中可以得到随动控制器为单位比例控制时的操舵系统开环传递函数为

3 控制器设计及仿真
根据以上的分析,完成了随动系统的传递函数模型,再利用液压仿真软件AMEsim4.2[5],对随动系统的控制器进行设计和仿真分析。
随动舵系统是单纯的电液位置控制伺服系统,其理论和结构都不太复杂,因此仍普遍采用经典PID控制理论来指导随动舵系统的设计[6]。所建立的模型系统中,对于控制器采用PID控制理论进行设计。
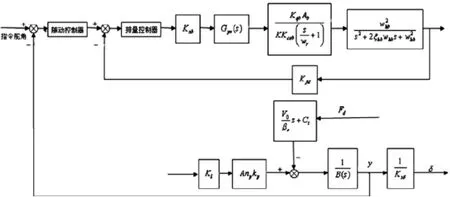
图1 操舵系统的控制系统原理图
以某型400N.m液压舵机为例。柱塞直径为220mm。主泵的选型:Parker Axial Piston Pump PV180,其技术指标:额定压力,35MPa;最大功率,175KW;最大扭矩,760N.m。电动机选型:Y2系列三相异步电机,其技术指标:额定功率,0.12~315KW;额定频率,50Hz;额定电压,380V;额定转速,1440rpm。液压管路的参数:公称直径,32mm;钢管外径,42mm;管接头螺纹,M42×2mm;推荐管路通过流量,250L/min。冷却装置的设计:型号为2LQFWA6.0F,其冷却面积为6.0m2。
所设计系统应满足:在任何航行条件下,均能保证可靠地工作,即使在最大航速时,亦能保证将舵转至最大舵角,并有足够的转舵速度。对于海船舵机,通常要求从一舷35°。转至另一舷30°。的所需时间不应超过28s。舵机在最大倒车速度下(一般可取最大正航速度的一半工作时)应不致损坏。
根据以上分析,在AMEsim中建立如下模型,如图2所示。
通过不断的调整PID的参数,最终得到比较满意的结果,仿真结果如图3。
分析图3可知,开始前,舵处于没有偏转状态,即舵角为0°。开始后,给了一个指令舵角-35°,即要求舵在一定的时间内偏转到一侧最大舵角处。指令舵角与反馈舵角作差,偏差信号经过随动控制器,进入变量泵控制变量泵的排量,经过大约13s后,柱塞缸在变量泵的作用下产生了-0.4m的位移,此时舵转到一侧的最大角度35°。图中的位移传感器检测出柱塞缸的位移,并将它转换成角度反馈回来。在仿真运行到40s时,给出另外一个指令舵角30°,要求在舵从一侧35°,转到另一侧30°的时间小于28s。从图中可知,显然满足这样的条件,设计的随动控制器符合要求。该控制器是一个比例控制,它的比例增益为0.5。
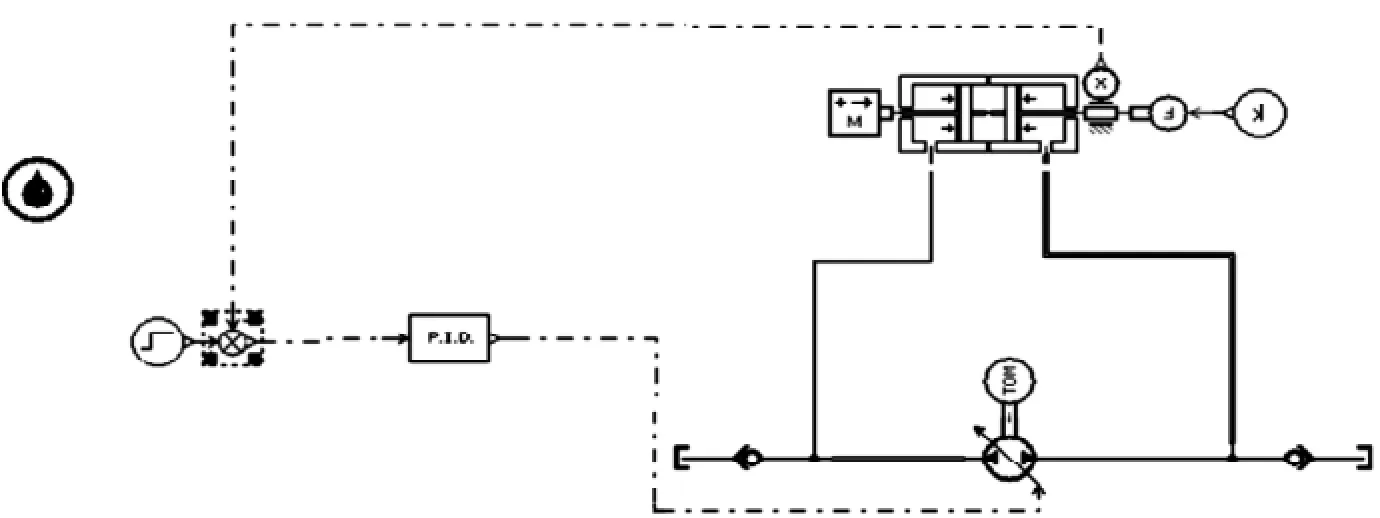
图2 AMEsim仿真模型图
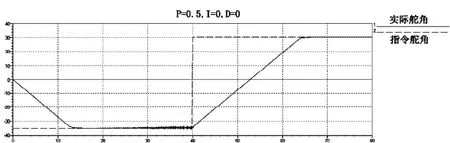
图3 仿真结果
4 结语
通过对舵机系统模型的分析,设计了其控制系统,并采用AMEsim进行了软件仿真,验证了设计结果是符合要求的。同时表明,采用软件仿真对电液舵机控制系统进行辅助设计具有周期短,易于修改控制系统参数等优点。为类似系统设计提供了参考。
[1]姚寿广.船舶辅机,哈尔滨工程大学出版社,2004.
[2]张利平.液压控制系统及设计.北京:化学工业出版社,工业装备与信息工程出版中心,2006.
[3]杨征瑞,花克勤,徐轶.电液比例与伺服控制.北京:冶金工业出版社,2009.
[4]许福玲,陈尧民.液压与气压传动(第二版).机械工业出版社,2006.
[5]付永领,祁晓野.AMESim系统建模和仿真--从入门到精通.北京航空航天大学出版社,2006.
[6]Tatsuo Arie, Masanori Itoh,Akira Senoh,Nobuhiko Takahashi,Seizo Fujii, and Naoki Mizuno,An Adaptive Steering System for a Ship,IEEE,1985.
舒冠柏(1970—),男,湖北监利人,工程师,现工作于湖北饭店有限公司;袁媛(1983—),女,湖北石首人,讲师,现工作于空军预警学院三系电路与系统教研室。