水声通信中基于信道辨识的盲turbo均衡方法∗
2015-10-28杨晓霞王海斌张仁和
杨晓霞 王海斌 汪 俊 张仁和
(1中国科学院声学研究所声场声信息国家重点实验室 北京 100190)
(2中国科学院大学 北京 100049)
水声通信中基于信道辨识的盲turbo均衡方法∗
杨晓霞1,2†王海斌1汪俊1张仁和1
(1中国科学院声学研究所声场声信息国家重点实验室北京100190)
(2中国科学院大学北京100049)
水声信道多途效应明显,造成接收信号存在严重的码间干扰(ISI,Intersymbol interference)。基于最小均方误差(MMSE,Minimum mean square error)准则的turbo均衡器级联了均衡和信道译码,能够有效去除ISI,并获得优良的性能。由于水声信道的时变性,传统MMSE-turbo均衡需要周期性的训练序列,以实现连续可靠的通信。训练序列虽然提高了通信的可靠性,但降低了信息的有效传输速率。因此,为提高通信效率,本文提出了一种盲turbo均衡方法,该方法通过引入新的盲信道辨识器来同时获得信道估计响应和已去除部分ISI的初步均衡输出信号,并为turbo均衡提供初始的响应参数和比特软信息。与水声通信中应用较多的盲判决反馈均衡器(DFE,Decision feedback equalizer)相比,海上实验结果证明本文提出的盲turbo均衡方法抗信道多途衰落的能力较强,并且与传统MMSE-turbo均衡相比无需训练序列,因此提高了信息的有效传输速率。关键词盲turbo均衡,盲信道辨识,水声通信
1 引言
水声通信信道多途复杂,特别是针对较高速率通信,多途时延扩展会覆盖几十甚至上百个码元符号,造成接收信号存在严重的码间干扰(ISI,Intersymbol interference)[1],并导致接收端产生误码。均衡器[2-5]能够消除ISI并恢复出原始发送信号,是实现可靠通信的一个重要手段。
目前水声通信中应用较广泛的均衡器包括判决反馈均衡器(DFE,Decision feedback equalizer)以及DFE与空间分集、时间反转等技术的结合。但是,DFE不是最优均衡结构,不能完全消除ISI,而且在衰落严重且信噪比低的信道下,DFE有可能发生误差传播,导致性能下降。Turbo均衡[6]不同于DFE,它将均衡和信道译码级联起来,共同对抗信道衰落,提高了均衡器的性能。Turbo均衡主要有两种均衡结构:基于最大后验概率(MAP,Maximum a posteriori)准则turbo均衡和基于最小均方误差(MMSE,Minimum mean square error)准则turbo均衡。MAP-turbo均衡的计算复杂度随信道阶数呈指数次方增加,在时延扩展较大的水声信道中难以应用;MMSE-turbo均衡采用干扰抵消[7]的均衡方式,由两个滤波器组成,其响应参数可通过LMS或RLS算法自适应更新,计算复杂度低,是近年水声通信中的一个研究热点。
MMSE-turbo均衡需要训练序列来跟踪信道并获得均衡器响应,而且由于水声信道的时变性,发射端需要周期性地发送训练序列以实现连续可靠的通信。训练序列的加入虽然能够提高通信的可靠性,但却占用了一部分信道资源,降低了信息的有效传输速率。为解决这一问题,相关文献对无需训练序列的盲均衡[8-10]开展了研究。最初的盲均衡基于高阶累积量,但这类盲均衡器具有收敛速度慢、计算复杂度高等特点,在水声通信中应用难度较大;随后发展了基于二阶循环累积量的算法,如子空间算法、线性预测算法等,但这些算法大多用于时不变信道;目前在水声通信中已成熟应用的盲均衡器是由J.Labat等人提出的采用双模式结构的盲自适应DFE[11-13],该均衡器能够达到与传统DFE基本相当的稳态均方误差,但仍不能获得最优的抗信道衰落的性能。
因此,为获得性能优良的盲均衡器,本文提出了一种基于信道辨识的盲turbo均衡方法,其首先利用盲辨识得到的信道计算turbo均衡的初始响应,然后基于MMSE准则对均衡器参数进行更新,并消除ISI。与盲DFE相比,该盲turbo均衡方法能够获得更强的抗信道多途衰落的能力,而且相较于传统MMSE-turbo均衡,无需训练序列,提高了信息的有效传输速率。
本文的组织结构为:第二节提出基于信道辨识的盲turbo均衡方法,研究其工作原理及实现结构;第三节对盲turbo均衡器进行海上实验验证;第四节对全文进行总结。
2 基于信道辨识的盲turbo均衡方法
2.1基本原理
采用turbo均衡的数字通信发射系统一般满足图1所示的结构,二进制随机序列经过信道编码、交织之后,通过合适的调制方式将比特信息映射到符号d(n)。d(n)经过信道h(n)传输之后,接收信号可表示为

图1 采用turbo均衡的通信系统发射端的结构框图Fig.1 Block diagram of transmitter in the communication system with turbo eqalizer
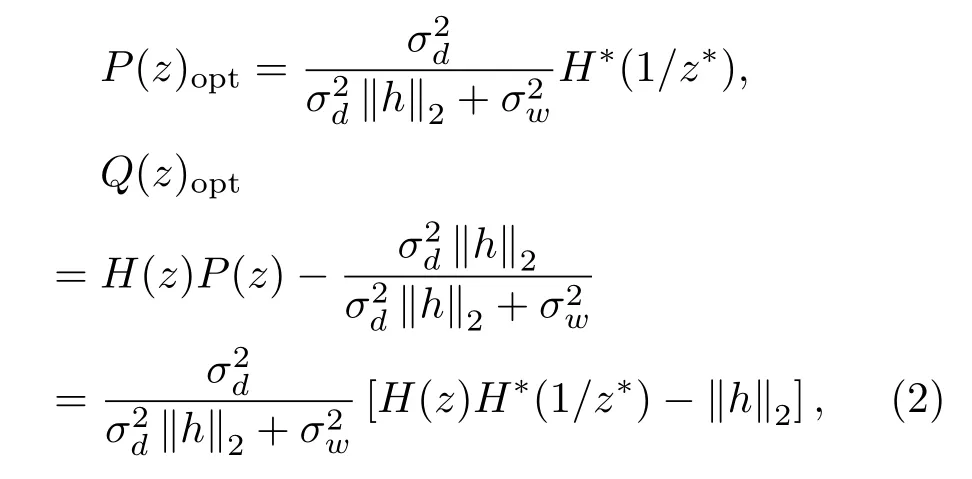
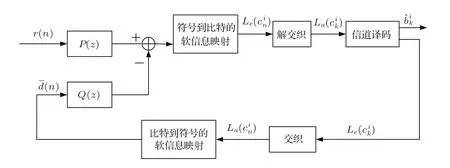
图2 MMSE-turbo均衡器结构框图Fig.2 Block diagram of MMSE-turbo equalizer
在MMSE-turbo均衡器中,需要获得P(z)、Q(z)的响应参数,得到均衡输出信号,然后利用该信号求解比特软信息,从而实现均衡和信道译码之间的循环迭代。基于此,在本文的盲turbo均衡方法中,我们首先提出一种新的盲信道辨识器,其能够同时获得两部分结果:信道估计响应和已去除部分ISI的初步均衡输出信号。将信道估计响应代入式(2)可以得到P(z)和Q(z)的初始响应参数,而初步均衡输出信号为turbo均衡提供比特的初始软信息。在完成turbo均衡器的初始化之后,无需训练序列便可以启动均衡和信道译码之间的循环迭代,从而实现盲turbo均衡。下面将详细介绍这种新的盲信道辨识器。
2.2盲信道辨识器
均衡能够补偿信道对信号产生的衰落,因此,类似于MMSE-turbo均衡器,基于MMSE准则的线性均衡器(MMSE-LE,MMSE linear equalizer)的最优响应也是信道响应的函数:

CMMSE-LE(z)的分子为信道时反响应。如果MMSELE能够拆分成H∗(1/z∗)与其他滤波器线性级联的结构[14],那么在实现此线性均衡器的同时便可以得到信道响应。
式(3)的分母为接收信号r(n)的功率谱Srr(z),可对其进行谱分解并得到
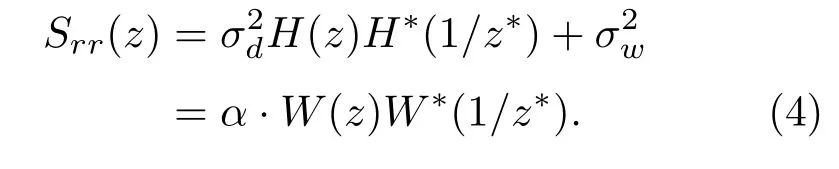
W(z)的零点均在单位圆内,是最小相位因果滤波器;W∗(1/z∗)是W(z)的共轭形式,零点均在单位圆外,为最大相位非因果滤波器;α是常数因子,使得W(z)和W∗(1/z∗)的首元素为1。将式(4)代入式(3),CMMSE-LE(z)可进一步表示为

CMMSE-LE(z)被分解成三个滤波器:1/W(z)、1/[W∗(1/z∗)]和H∗(1/z∗)线性级联的形式,如图3所示,该结构即为本文提出的盲信道辨识器。我们将根据各滤波器的物理意义,设计合适的优化准则,并采用自适应迭代算法有效快速地更新参数,以适用于水声信道。

图3 盲信道辨识新算法的结构框图Fig.3 Block diagram of blind channel identification
2.2.11/W(z)求解
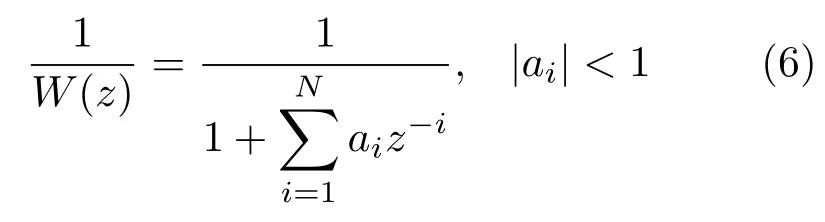
W(z)对应 Srr(z)谱分解中的最小相位部分,且首元素为1,因此1/W(z)可表示成如下形式:
r(n)经过1/W(z)滤波之后的输出信号y(n)为

其中,A=[a1,a2,···,aN]T,Yn=[y(n-1),y(n-2),···,y(n-N)]T。计算y(n)的功率谱得到

式(8)表明,y(n)具有平坦谱,在时域上表现为不相关,因此,1/W(z)能够实现r(n)的白化处理。式(7)中ATYn可进一步认为是r(n)的前向线性预测结果,y(n)为预测误差。基于此,得到参数A的代价函数和迭代更新公式如下:
2.2.21/[W∗(1/z∗)]求解
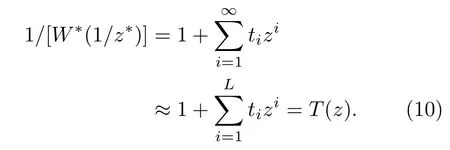
1/[W∗(1/z∗)]的极点均在单位圆外,是非因果最大相位滤波器,无法以IIR的形式实现,因此,我们对1/[W∗(1/z∗)]做次优化处理,用其截短形式T(z)近似,
类似于1/W(z)的实现过程,r(n)经过T(z)滤波之后的输出信号可设为x(n):
其中,T=[-t1,-t2,···,-tL]T,Rn=[r(n+1), r(n+2),···,r(n+L)]T。计算x(n)的功率谱得到
Sxx(z)近似为常数,因此,T(z)也能够实现r(n)的白化处理。类似于A,式(11)中T可看作是后向预测滤波器响应参数,x(n)为后向预测误差,T的代价函数及迭代更新公式如下:
2.2.3H∗(1/z∗)求解
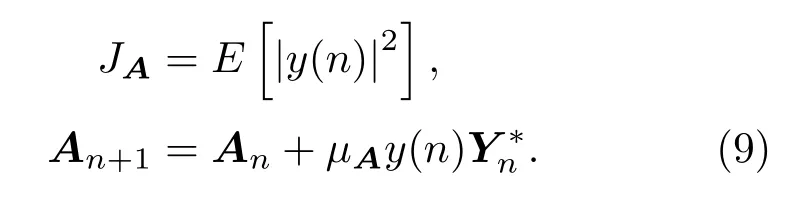
获得1/W(z)和1/[W∗(1/z∗)]之后,图3所示的盲信道辨识器中仅剩下H∗(1/z∗)未知。由以上分析可知,该信道辨识器实际是一个线性均衡器,此时H∗(1/z∗)无需训练序列,可通过盲均衡算法[15-16]实现。本文中,我们以易于实现的CMA[17]为代表求得H∗(1/z∗),CMA的代价函数为
H∗(1/z∗)的输出已去除了部分ISI,对进行判决可得到初步的均衡输出符号和均方误差MSE1:

2.3盲turbo均衡方法实现结构
上述盲信道辨识器的一部分输出结果为信道估计响应H∗(1/z∗),将其代入式(2)可以得到turbo均衡器中P(z)和Q(z)的初始响应;另一部分输出为已经去除部分ISI的信号利用的判决符号可为turbo均衡提供比特的初始软信息。但是,当误码较多时,利用得到的比特软信息较差,如果将该软信息送入turbo均衡器中,均衡性能反而会受到影响。为此,可以依据的误码率情况决定是否利用为turbo均衡提供比特的初始软信息。然而在实际通信中,由于无法统计误码率,我们采用与误码率相关的均方误差MSE1作为判决依据,并将MSE1与预先设置的门限M0对比,得到如下判决准则:若MSE1<M0,将)映射为比特软信息,turbo均衡可以采用较少的迭代次数达到收敛;反之则不被送入turbo均衡器中,以免造成误差传播,此时比特的初始软信息设为0。为保证turbo均衡能够趋向收敛,利用得到的软信息准确性要求较高,因此,门限M0一般选取误码率为0.02[11]所对应的均方误差值。
通过以上分析,盲信道辨识器获得的信道响应和初步的均衡判决均通过相应的方式与turbo均衡实现结合,得到基于信道辨识的盲turbo均衡,实现框图如图4所示。
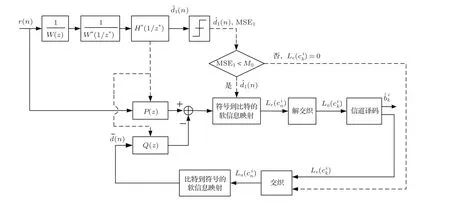
图4 基于信道辨识的盲turbo均衡方法实现框图Fig.4 Structure of blind turbo equalization based on channel identification
总结基于信道辨识的盲turbo均衡的实现过程如下:
步骤1:将接收信号r(n)送入盲信道辨识器进行处理,依次求得1/W(z)和1/[W∗(1/z∗)],得到信道时反响应H∗(1/z∗)、初步的均衡判决ˆd1(n)及均方误差MSE1;
步骤2:比较MSE1与预先设定的门限值M0,若MSE1<M0,将通过符号到比特的软信息映射→解交织→信道译码→交织→比特到符号的软信息映射处理,为步骤3中的turbo均衡提供比特的初始软信息,然后运行步骤3;若MSE1>M0,比特的初始软信息为0,然后运行步骤3;
步骤3:利用信道估计响应H∗(1/z∗)计算P(z)和Q(z)的初始响应,然后接收信号r(n)经过均衡和信道译码循环迭代处理,P(z)和Q(z)的参数采用LMS或RLS算法进行自适应更新。
盲信道辨识器估计得到的信道响应存在误差,因此求得的P(z)和Q(z)不是最优响应值,需要利用LMS或RLS算法并联合信道译码进行多次循环迭代趋近最优turbo均衡响应。由于盲turbo均衡没有训练序列,与传统MMSE-turbo均衡相比,需要较多的循环迭代次数,但是,收敛之后能够获得与传统MMSE-turbo均衡基本相当的误码率。因此,本文提出的基于信道辨识的盲turbo均衡方法以适当增加计算量为代价,提高信息的有效传输速率并保证通信的可靠性。
3 海试验证
为了验证本文提出的基于信道辨识的盲turbo均衡方法的有效性,我们分别对2011年12月份的黄海浅海实验数据和2013年7月份的西太平洋深海实验数据进行处理。
3.1黄海实验
在黄海实验中,通信距离大约为18.5 km。发射端采用编码速率为2/3的卷积编码器,调制方式为QPSK,载频4 kHz,通信速率2 kbps。在采用基于信道辨识的盲turbo均衡器时,判决门限值M0=-6 dB。
我们首先分析盲turbo均衡方法中信道辨识器的性能。图5(a)为采用训练序列估计得到的信道响应,可以近似看作真实信道。图5(b)为盲辨识得到的信道响应,与图5(a)对比可发现,在两种方法的辨识结果中,能量较小的多径分量的估计值有一定的差别,对于能量较大的多径分量,新的盲信道辨识器能够较准确地估计信道。
盲信道辨识器输出的均方误差和输入输出信号星座图如图6所示。可以发现,盲辨识器输出的稳态均方误差大约为-7 dB,小于判决门限-6 dB,而且从)的星座图中也可以看出,信号有一定的可信度,因此,可以利用为turbo均衡提供比特的初始软信息。
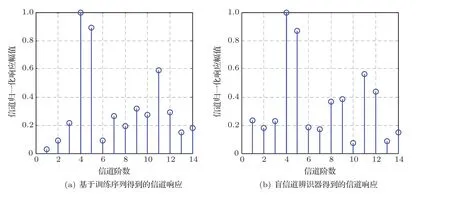
图5 黄海实验信道辨识结果Fig.5 Results of channel identification in Yellow sea test
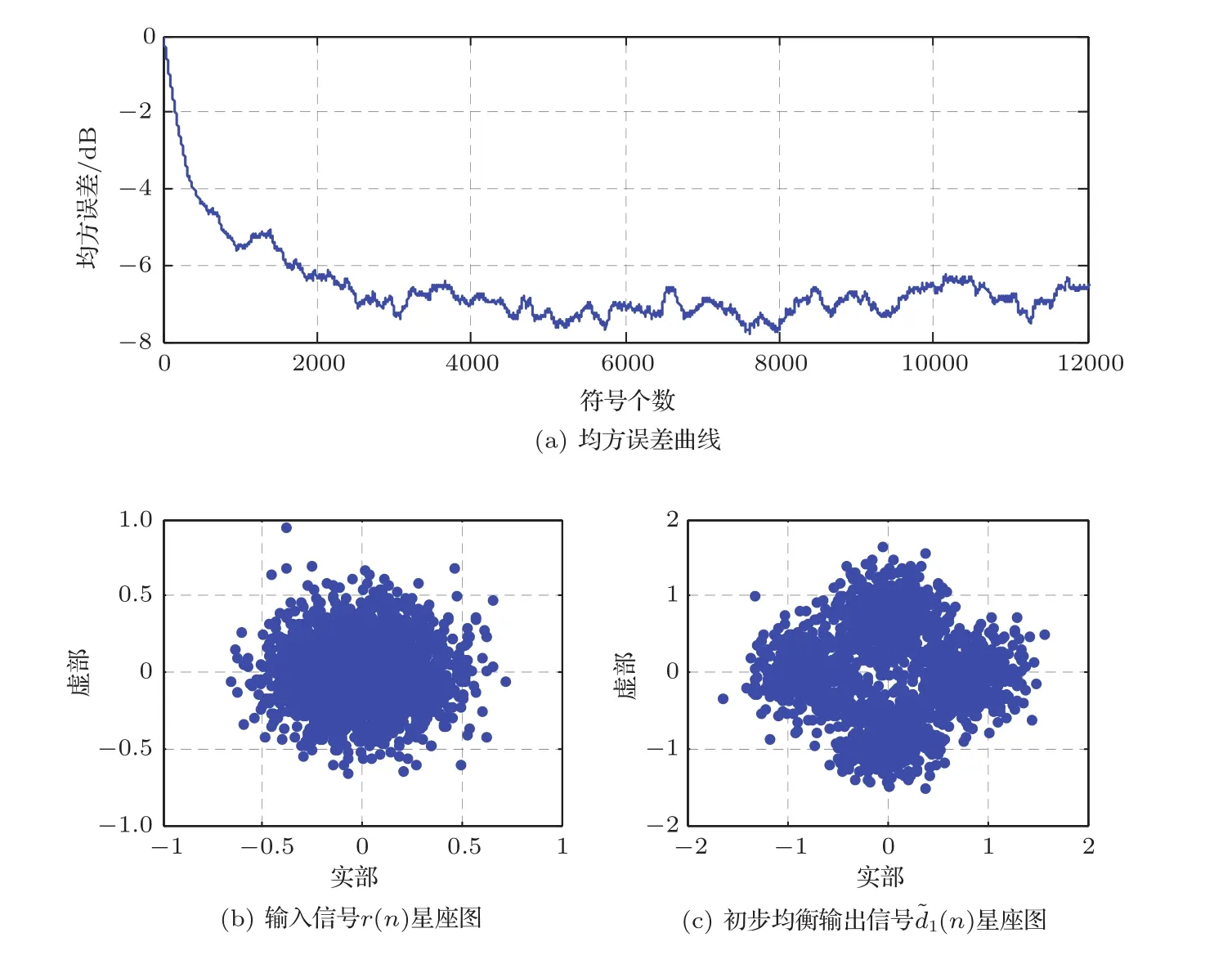
图6 盲信道辨识器输出结果Fig.6 Output results of the blind channel identification
为验证基于信道辨识的盲turbo均衡方法抗信道多途衰落的能力,我们将其分别与盲DFE和带1000个训练符号的传统MMSE-turbo均衡比较。三种均衡器的参数及算法见表1,均衡输出结果如图7所示。与盲DFE相比,盲turbo均衡能够获得更小的稳态均方误差,输出信号星座图也更清晰。传统MMSE-turbo均衡和盲turbo均衡都采用两次循环迭代达到收敛状态,而且两者的稳态均方误差基本相当。盲DFE、盲turbo均衡和传统MMSE-turbo均衡信道译码之前的实测误码率分别为3.8×10-2、2.3×10-3、0.8×10-3,译码之后分别为1.4×10-3,0,0。盲turbo均衡的误码率与传统MMSE-turbo均衡基本相当,并且远小于盲DFE。由此可见,本文提出的盲turbo均衡方法性能优于盲DFE,而与传统turbo均衡相比,盲turbo均衡无需训练,在本次实验中使得信息的有效传输速率提高了8.33%,从而盲turbo均衡既提高了通信效率,又保证了通信的可靠性。
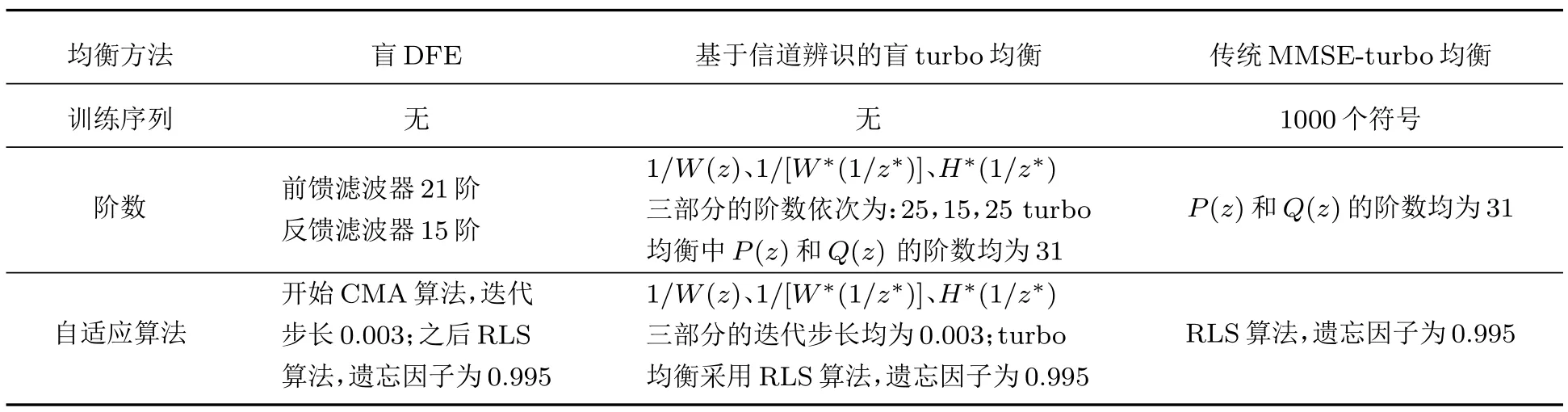
表1 黄海实验数据处理中不同均衡方式的参数选取Table 1 Parameters of different equalizers in Yellow sea test
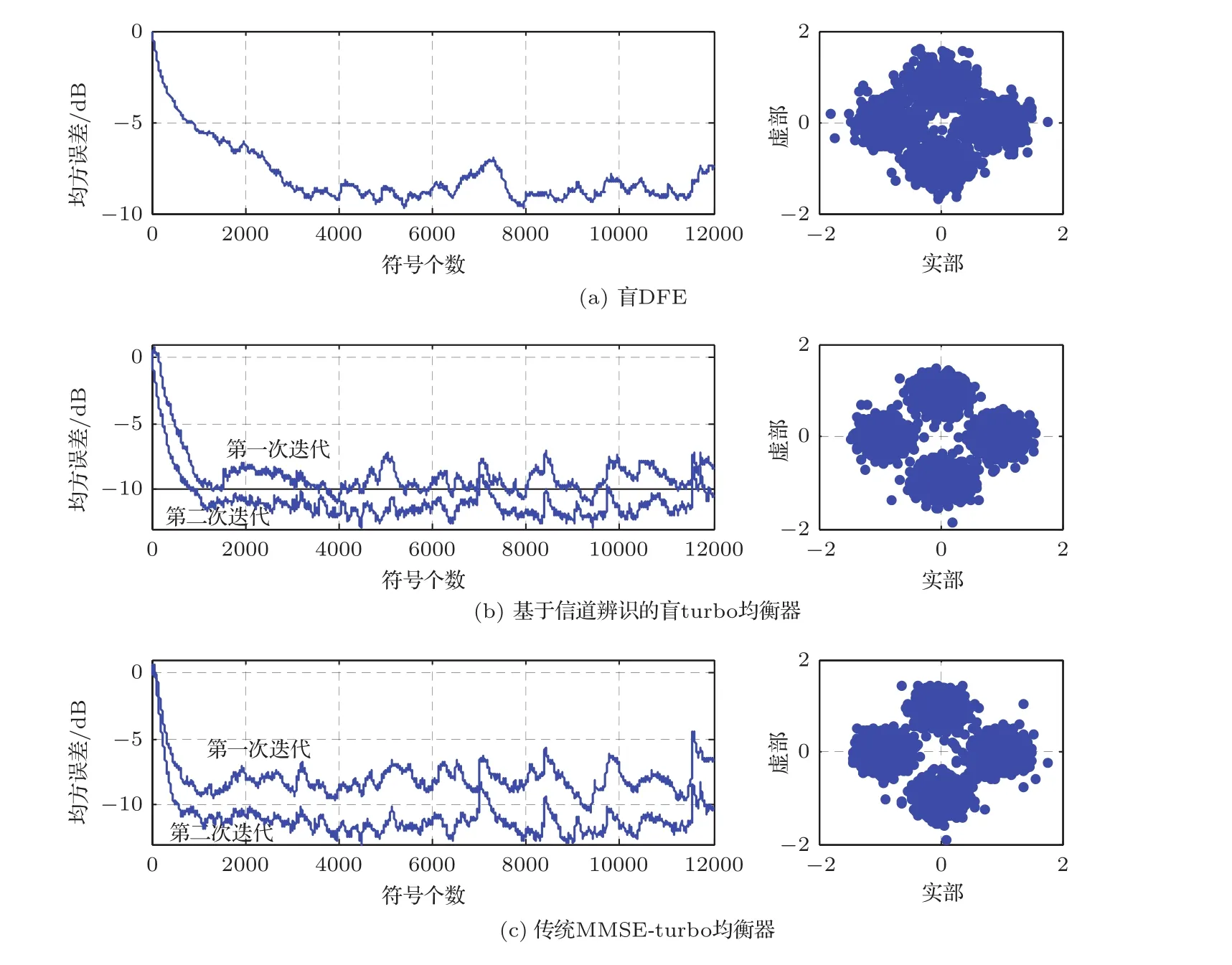
图7 黄海实验中不同均衡器的输出结果,左列为均方误差曲线,右列为均衡输出信号星座图Fig.7 Results of different equalizers in the Yellow Sea test,the left column is curve of the mean square error,the right column is constellation diagram of equalizer outputs
3.2深海实验
深海实验海区位于西太平洋,海深大约5000 m,声速剖面如图8所示。由声传播模型得到实验海区的传播损失如图9所示,深海信道存在明显的会聚区和声影区。
发射端采用编码速率为2/3的卷积编码器,调制方式为BPSK,通信速率为50 bps。采用浅发浅收方式,发射端定点发射信号,接收船匀速航行并利用拖曳阵接收信号。这里我们详细分析接收船距离声源位于第二声影区、通信距离为106 km时的处理结果。由于该距离处信道多途复杂,如图10所示,多途时延扩展覆盖了将近100个码元符号,利用盲turbo均衡实现该区域的水声通信更具代表性。
我们仍采用盲DFE、基于信道辨识的盲turbo均衡和传统MMSE-turbo均衡对接收信号进行处理,三种均衡器的参数及迭代算法如表2所示,它们均采取了稀疏化处理以获得更好的性能,均衡输出结果如图11所示。由于该通信距离处信道多途扩展严重且信噪比较低,在此条件下盲DFE已不能有效去除ISI,输出信号星座图模糊,误码率高。盲turbo和传统MMSE-turbo均衡分别采用20次和8次循环迭代达到收敛状态,从均衡输出结果可以看出,盲turbo均衡的输出信号星座图清晰,两者均衡输出的误码率分别为1.7×10-2和0.7×10-2,信道译码之后都可以实现可靠通信。该海试结果表明盲turbo均衡能够达到与传统MMSE-turbo均衡相当的误码率,但是由于盲turbo均衡无需训练序列,因此,在本次实验中采用盲turbo均衡使得通信效率提高了34%。
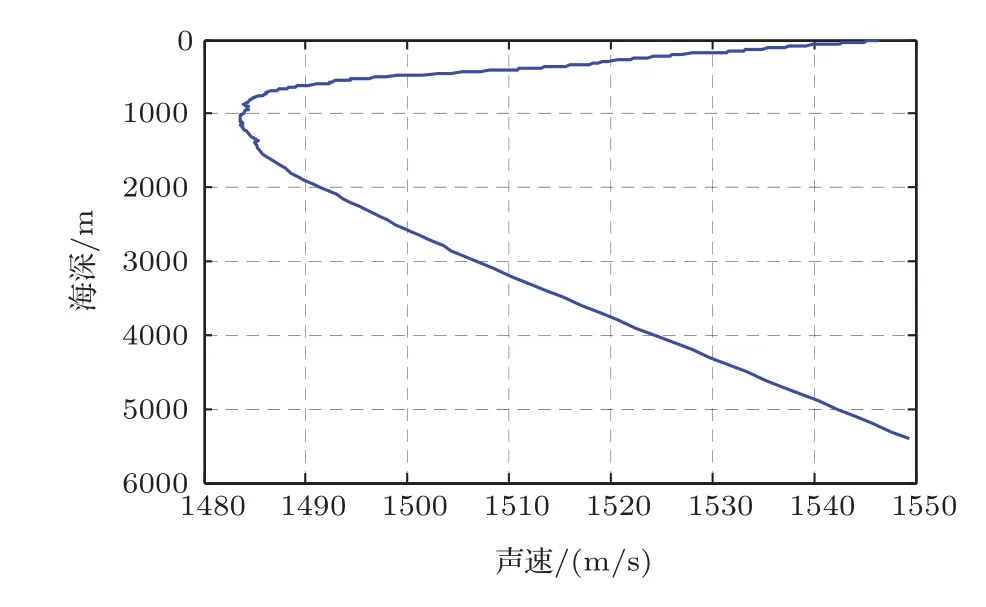
图8 实验海区声速剖面Fig.8 Sound speed profile in the region of sea test
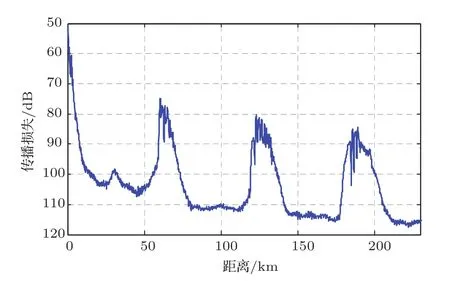
图9 传播损失随距离的变化曲线图Fig.9 Transmission lost with the communication range
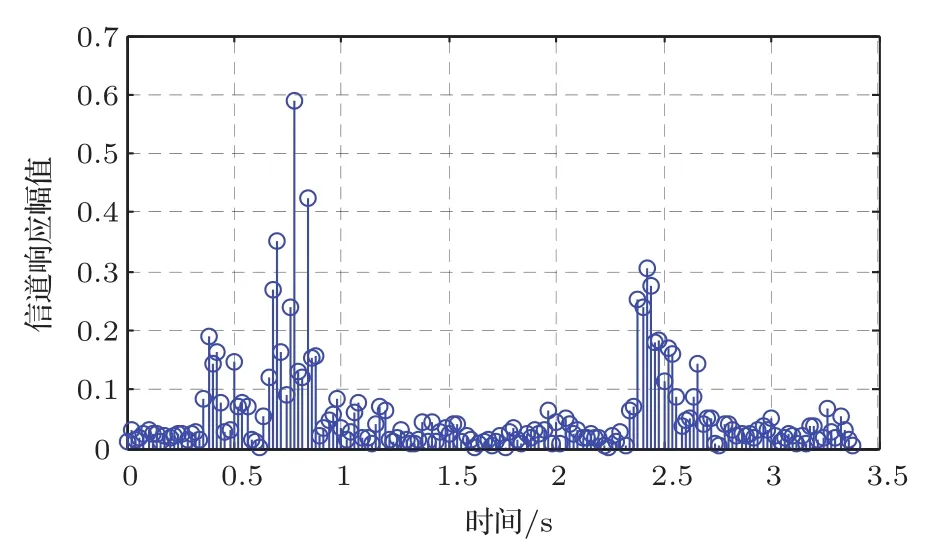
图10 深海实验中通信距离为106 km处的信道响应Fig.10 Channel response at the communication range of 106 km in the deep sea test
为进一步对比盲turbo均衡和其他两种均衡器的性能,我们对不同通信距离68 km(会聚区)、110 km(第二影区)和164 km(第三影区)的接收信号进行处理,并得到如表3所示的均衡输出误码率结果。可以发现,在信道多途结构简单且信噪比较高的会聚区深海信道,盲DFE可以去除ISI,但是性能仍略差于盲turbo均衡;在多途衰落严重且信噪比低的声影区信道下,盲DFE性能变差,不能有效对抗多途衰落,误码率高,而盲turbo均衡仍然能够去除ISI,而且无需训练序列达到了与传统MMSE-turbo均衡相当的误码率。
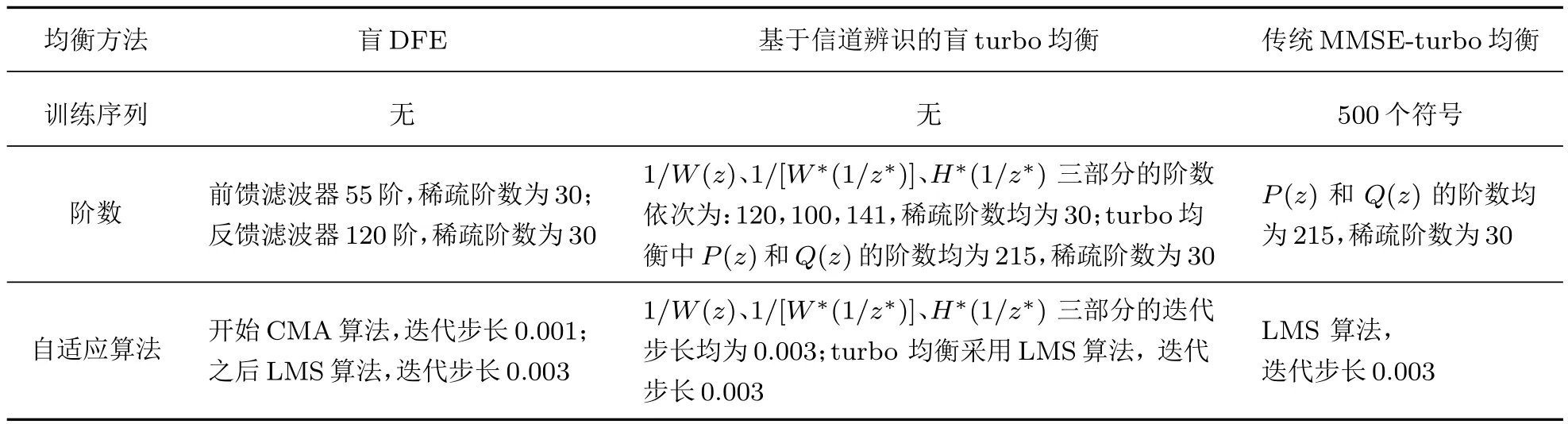
表2 深海实验数据处理中不同均衡方法的参数选取Table 2 Parameters of different equalizers in the deep sea test
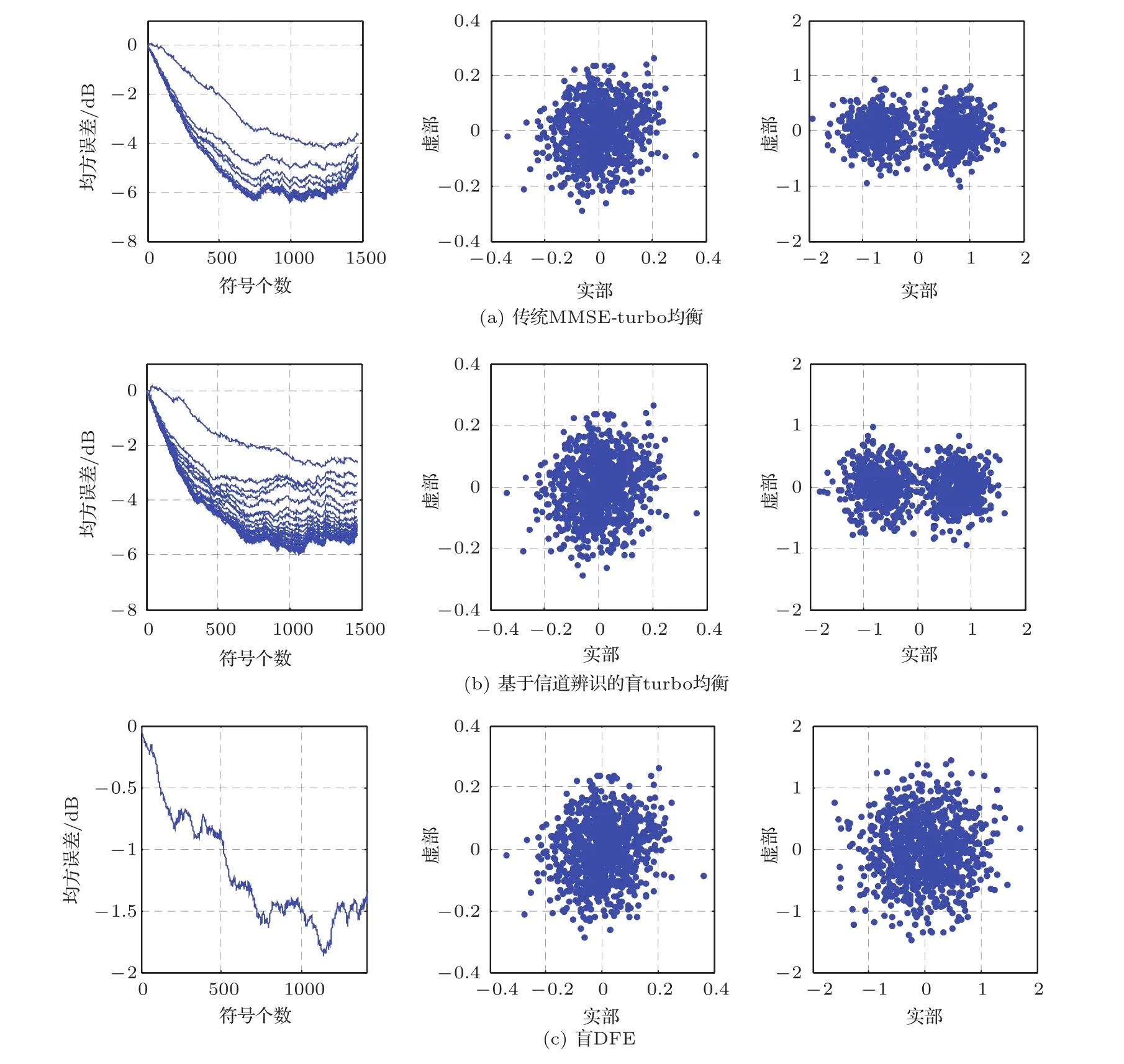
图11 通信距离为106 km处的处理结果,第一列为均衡器输出均方误差曲线,第二列为无均衡信号星座图,第三列为均衡输出信号星座图Fig.11 Results of different equalizers at the range of 106 km,the first column is curve of the mean square error,the second column is constellation of equalizer input signals,the third column is constellation of equalizer output signals

表3 深海实验不同通信距离处,不同均衡器的误码率结果Table 3 Bit error rate for different equalizers at different ranges in the deep sea test
4 结论
本文针对传统MMSE-turbo均衡需要训练序列而降低有效信息传输速率这一问题,提出了一种盲turbo均衡方法,该方法由新的盲信道辨识器和MMSE-turbo均衡器两部分组成。盲信道辨识器有两部分输出结果:一部分为信道估计值,用于求解turbo均衡初始响应;另一部分为初步的均衡输出信号,当信号可信度高时,为turbo均衡提供比特的初始软信息,减少均衡循环迭代次数。基于信道辨识的盲turbo均衡中各滤波器均采用自适应迭代算法快速有效更新参数,适用于水声通信,并且已经成功经过了浅海和深海实验验证。海试结果表明,与盲DFE相比,该盲turbo均衡方法抗信道多途衰落能力较强,而且无需训练序列获得与传统MMSE-turbo均衡基本相当的误码率,提高了信息有效传输速率。因此,本文提出的基于信道辨识的盲turbo均衡器在带宽受限的水声信道中为实现可靠有效通信提供了一种新的方法,具有良好的应用前景。
[1]KILFOYLE D B,BAGGEROER A B.The state of the art in underwater acoustic telemetry[J].IEEE J.Oceanic. Eng.,2000,25(1):4-27.
[2]杨日杰,李淑华,张宗玉.水声信道线性均衡的研究[J].应用声学,2002,21(6):22-27. YANG Rijie,LI Shuhua,ZHANG Zongyu.Study of underwater acoustic channel linear equalization[J].Applied Acoustics,2002,21(6):22-27.
[3]STOJANOVIC M,CATIPOVIC J,PROAKIS J G.Phasecoherent digital communications for underwater acoustic channels[J].IEEE J.Oceanic.Eng.,1994,19(1):100-111.
[4]STOJANOVICM.Recentadvancesinhigh-speed underwater acoustic communications[J].IEEE J.Oceanic. Eng.,1996,21(2):125-136.
[5]张涵,孙炳文,郭圣明.浅海环境中的时间反转多用户水声通信[J].应用声学,2009,28(3):214-219. ZHANG Han,SUN Bingwen,GUO Shengming.Timereversal multi-user underwater acoustic communication in shallow water[J].Applied Acoustics,2009,28(3):214-219.
[6]TUCHLER M,SINGER A C.Turbo equalization:An overview[J].IEEE Trans.Inform.Theory,2011,57(2):920-952.
[7]GERSHO A,LIM T L.Adaptive cancellation of intersymbol interference for data transmission[J].J.Bell Sys. Tech.J.,1981,60(11):1997-2021.
[8]PORAT B,FRIEDLANDER B.Blind equalization of digital communication channels using high-order moments[J]. IEEE Trans.Signal Process.,1991,39(2):522-526.
[9]TONG L,XU G H,KAILATH T.Blind identification and equalization based on second-order statistics—A timedomain approach[J].IEEE Trans.Inform.Theory,1994,40(2):340-349.
[10]MOULINES E,DUHAMEL P,CARDOSO J F,et al. Subspace methods for the blind identification of multichannel FIR filters[J].IEEE Trans.Signal Process.,1995,43(2):516-525.
[11]LABAT J,MACCHI O,LAOT C.Adaptive decision feedback equalization:Can you skip the training period?[J]. IEEE Trans.Commun.,1998,46(7):921-930.
[12]LABATJ,LAOTC.Blindadaptivemultiple-input decision feedback equalizer with a self-optimized configuration[J].IEEE Trans.Commun.,2001,49(4):646-654.
[13]EYNARD G,LAOT C.Implementation of a blind adaptive decision feedback equalizer[C].EUSIPCO 06,Florence,Italy,2006.
[14]杨晓霞,王海斌.一种盲信道辨识新方法[C].第九届中国声学学会青年学术会议,广州,2011.
[15]BENVENISTE A,GOURSAT M.Blind equalizers[J]. IEEE Trans.Commun.,1984,32(8):871-883.
[16]张艳萍,赵俊渭,李金明.一种快速收敛的符号回归常数模盲均衡算法[J].应用声学,2005,24(2):122-125. ZHANG Yanping,ZHAO Junwei,LI Jinming.A fast convergent signed regressor constant modulus algorithm for blind equalization[J].Applied Acoustics,2005,24(2):122-125.
[17]GODARD D.Self-recovering equalization and carrier tracking in two-dimensional data communication systems[J].IEEE Trans.Commun.,1980,28(11):1867-1875.
Blind turbo equalization based on channel identification for underwater acoustic communications
YANG Xiaoxia1,2WANG Haibin1WANG Jun1ZHANG Renhe1
(1 State Key Laboratory of Acoustics,Institute of Acoustic,Chinese Academy of Sciences,Beijing 100190,China)
(2 University of Chinese Academy of Science,Beijing 100049,China)
Underwater acoustic channels usually suffer from the extended multipath propagation which causes intersymbol interference(ISI).Turbo equalization is an iterative equalization and decoding technique that can remove ISI and achieve impressive performance.Since underwater channels are time-varying,turbo equalization needs periodic transmission of training sequences to keep continuous communication.Although the training sequence improves communication reliability,it decreases the effective bit rate.We therefore proposed a blind turbo equalizer.This equalizer uses a new blind channel identification,which outputs the estimated channel impulse response and transmitted symbols with residual ISIs,and these two parts of outputs are used to get initial response of the turbo equalizer and the soft information.Sea test results show that the new blind turbo equalizer can perform better than the blind decision feedback equalizer(DFE),and it increases the effective bit rate,comparing with the conventional turbo equalizer.
Blind turbo equalization,Blind channel identification,Underwater acoustic communications
TN911.5
A
1000-310X(2015)02-0125-10
10.11684/j.issn.1000-310X.2015.02.006
2014-02-20收稿;2014-07-23定稿
∗中国科学院科技创新交叉与合作团队项目
杨晓霞(1987-),女,河北保定人,博士研究生,研究方向:水声通信。
E-mail:yangxiaoxia@mail.ioa.ac.cn