电动轮汽车驱动机构冗余优化与主动安全控制
2015-10-28丁惜瀛王亚楠张泽宇王春强
丁惜瀛 王亚楠 李 琳 张泽宇 王春强
1.沈阳工业大学,沈阳,110870 2.辽宁省电力有限公司,沈阳,110870
电动轮汽车驱动机构冗余优化与主动安全控制
丁惜瀛1王亚楠1李琳1张泽宇2王春强1
1.沈阳工业大学,沈阳,1108702.辽宁省电力有限公司,沈阳,110870
针对电动轮汽车全新的底盘结构策略,采用分层控制,将姿态跟踪与底盘操纵量优化分配相结合,上层姿态控制器采用精确线性化控制策略克服系统非线性,生成改善行驶姿态所需合力矩;下层分配控制器采用二次规划算法,优化因四轮独立驱动而形成的冗余执行机构,综合实现姿态参数跟踪误差和轮胎力输出最小化,优化分配驱动扭矩、制动扭矩,减少整车能耗。仿真结果表明,该控制结构可使运行轨迹很好地跟踪驾驶员给定轨迹且车辆操作稳定性及安全性均得到明显的提高。
冗余执行机构;优化分配;主动安全控制;分层控制
0 引言
电动轮汽车将电机直接安装在驱动轮内,具有传动链短、传动效率高、结构紧凑等突出优点。电动轮转矩独立可控,使得电动汽车的转向灵活性和姿态控制性都较燃油汽车有了较大的改善。驱动轮采用独立电机作为驱动源,省略了差速等机械结构,使得车辆安全稳定运行完全依赖于控制系统,一方面对主动安全控制系统的准确性、稳定性、快速性提出更高要求,另一方面具备四轮独立驱动、制动及转向操控结构,底盘操纵稳定性控制呈现执行机构冗余。
针对四轮全驱电动汽车稳定性控制,文献[1]提出了横摆稳定性控制方法,由上层姿态控制器根据车辆运行状态对车辆的纵向运动、侧向运动进行控制,在进行轮胎力分配时忽略了车辆的约束条件,该方法在极限工况下控制效果有限。文献[2]提出了基于车辆横摆角速度和侧向加速度的控制策略,采用加权最小二乘法对轮胎力和控制器能量消耗进行优化,但仍未考虑车辆极限工况下轮胎力饱和的问题。此种分层控制结构的重点是设计下层分配控制器。文献[3]提出了一种以提高驱动系统能效为目标的分配策略,采用模糊算法优化系统能效目标函数中的稳定性和经济性两个指标,但忽略了电机最大输出及路面附着系数。文献[4]以轮胎路面附着利用率最小化为目标优化分配各车轮的地面切向力,为汽车的稳定行驶保留更多的附着余量,但该方法在一定程度上削弱了车体的其他动力学性能。文献[5]分别建立了侧重于稳定性和机动性的两种目标函数,并利用模糊权重函数优化了纵向力分配,但未考虑优化分配对系统的影响。
车辆在极限工况下呈严重非线性,操纵稳定性控制系统存在的鲁棒性问题和系统对动态响应速度的要求是系统设计的难点[6-7]。本文采用并联工作的分层控制结构提高系统的实时性,基于精确线性化理论构建上层车辆姿态控制策略,生成保持车辆稳定所需合力矩,提高系统对非线性的自适应能力。以车辆姿态控制器跟踪误差及执行机构输出最小化为目标,运用二次规划设计下层分配控制器,在满足轮胎力物理约束的条件下优化分配四轮牵引力。仿真结果表明,该控制方案可有效提高四轮全驱电动汽车的稳定性。
1 系统结构及车辆模型
1.1系统结构
图1为四轮全驱电动汽车操纵稳定性控制系统的结构框图,系统通过动态调节横摆角速度和质心侧偏角实现车辆的操纵稳定性控制。姿态控制器为控制结构的第一层,由参考模型输出的车辆理想姿态参数及观测参数计算出保证车辆稳定所需的“广义合力”。此“广义合力”作用于车辆重心,包括纵向力、侧向力、横摆力矩。
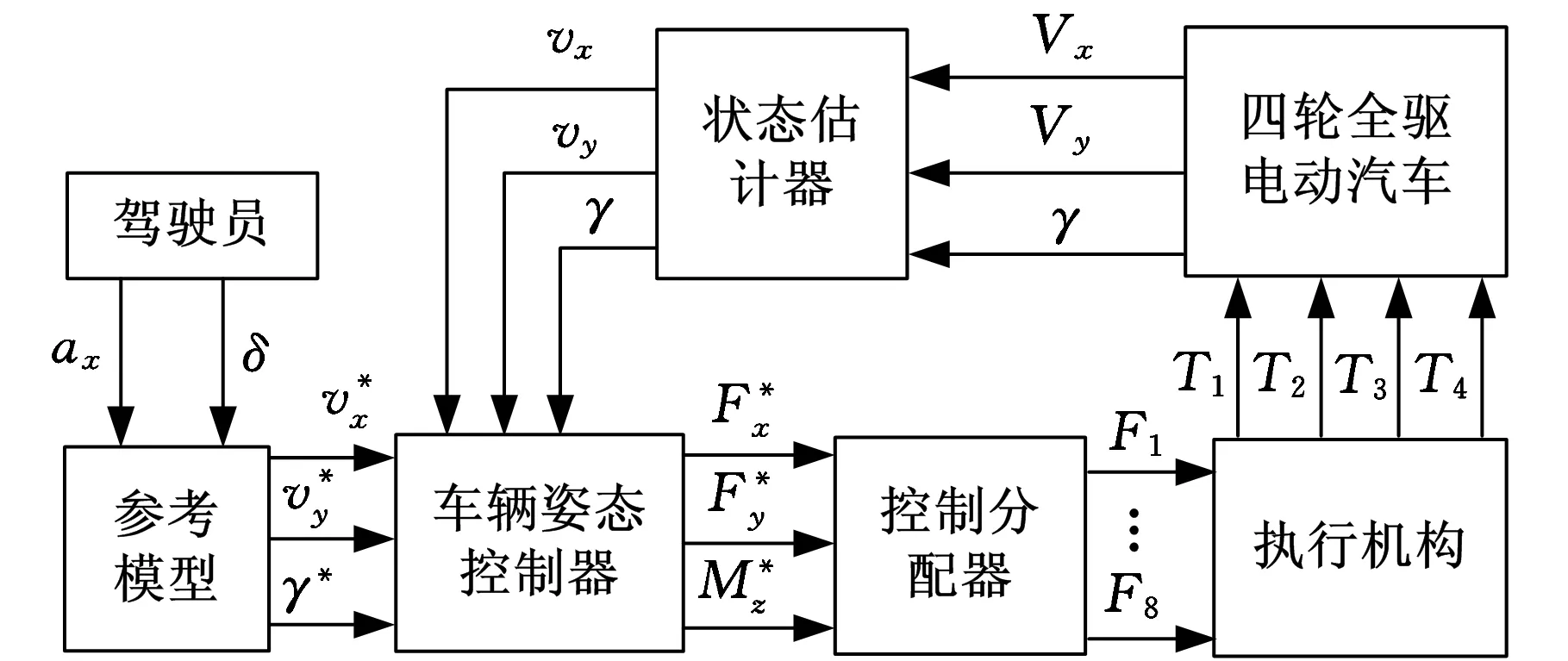
图1 四轮全驱电动汽车底盘集成系统结构框图
控制分配器是整车控制结构的第二层,其功能是按照一定的分配规则,在满足轮胎力约束的条件下将“广义合力”分配为各个执行机构的给定。对于四轮全驱电动汽车,执行结构的给定即四轮的纵向力、侧向力。
1.2车辆模型
对车身整体进行考虑,忽略悬架系统,无前后左右的摇摆,汽车的质心保持不变,可以看成一个简单的三自由度刚体[8],参考模型如图2所示。
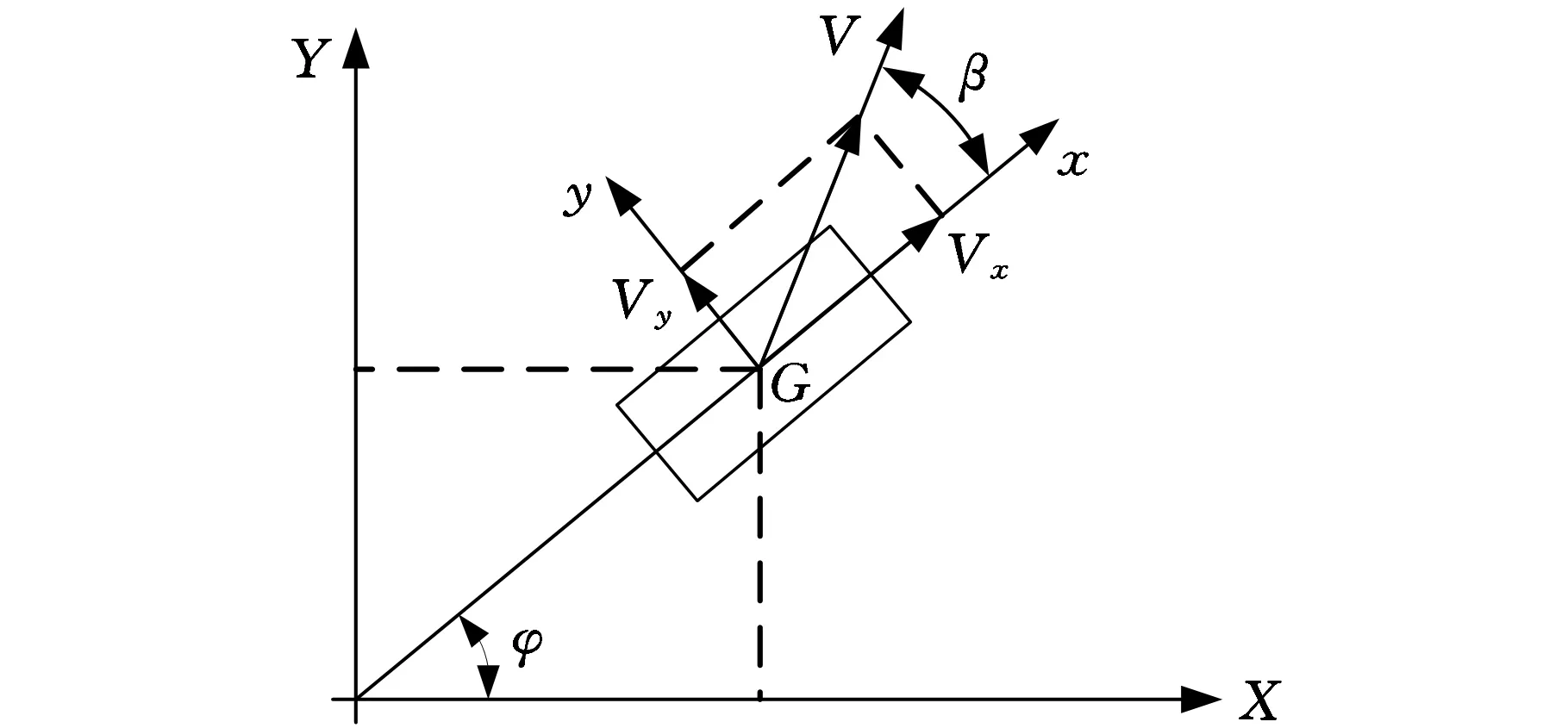
图2 汽车模型参考系
其中,XYZ是惯性参考系,xyz是基于汽车重心的非惯性参考系,β是速度矢量与车辆纵轴的夹角,X、Y、φ分别是惯性参考系下车辆模型沿X、Y方向的位移和车辆偏航角,则车辆的运动方程为
(1)
式中,m为车辆质量;J为车辆做横摆运动的转动惯量;FX、FY、MZ分别为惯性参考系下作用于整车的纵向力、侧向力、横摆力矩;Vx、Vy、γ分别为惯性参考系下车辆的纵向速度、侧向速度、横摆角速度。
车辆参考系下的运动方程为
(2)
式中,Fx、Fy、Mz分别为车辆参考系下作用于整车的纵向力、侧向力、横摆力矩。
2 姿态控制
采用非线性系统精确线性化方法可解决车辆的严重非线性问题[9],根据车辆实际运行状态及理想状态下的纵向速度、侧向速度、横摆角速度,基于三自由度车辆模型得到保证车辆稳定运行所需纵向力、侧向力及横摆合力矩。
车辆动力学模型满足非线性系统状态反馈线性化条件,可进行状态反馈线性化,线性化后有
(3)
v为虚拟输入,控制器v与真实控制器u的关系为
(4)
u1、u2、u3分别为控制量,对应车辆上位控制器的输出Fx、Fy、Mz,定义偏差如下:
(5)
则控制器的形式如下:
(6)
其中,fx(ex)、fy(ey)、fr(er)为针对偏差的控制算法,采用PID控制。
3 轮胎力控制分配
考虑到四轮全驱电动汽车对稳定性控制系统控制要求及节能性目标,下层控制分配器选取姿态控制器的跟踪误差及轮胎力的输出最小化为目标。针对系统严重非线性,二次规划算法具有运算速度快、硬件实现容易等优点[10],故采用该算法实时优化各轮胎力。
设计下层控制分配器如下:
F=BU
(7)
F=[FxFyMz]T
(8)
式中,F为上位控制器的给定;B为约束矩阵。
选取四个轮胎的纵向力和侧向力作为优化变量:
U=[FlflFlfrFlrlFlrrFsflFsfrFsrlFsrr]T
(9)
约束矩阵为
B=[B1B2B3]T
(10)
将约束条件F=BU做如下变化,取两者之间的差:
E=BU-F
(11)
若要使跟踪误差最小,可取其范数最小,由此可定义目标函数:
minJF=ETE/2
(12)
在满足跟踪目标函数的同时,也应保证轮胎力的输出最小,即
minJU=UTU/2
(13)
以姿态参数的跟踪误差及轮胎力输出最小化为优化目标,构建目标函数如下:
minJ=JF+λJU
(14)
轮胎力输出有限,受路面最大摩擦力限制,其优化区域为一个摩擦圆,如图3所示[11]。
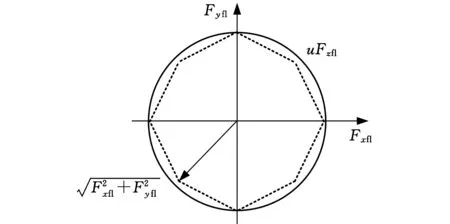
图3 轮胎摩擦圆约束
由于摩擦圆约束属于非线性规划,运算量大且会降低系统的实时性,故通过八边形逼近。以左前轮为例。由图3可得:
(15)
可将其写成二次规划约束标准型:
AconUfl≤bcon
(16)
U=[FxflFxfl]T
4 仿真分析
为了验证集成控制算法的有效性,选取表1所示参数在两种较为极限的工况:①低路面附着系数下的高速转向;②对开路面下的高速制动,对控制系统的性能进行验证。同时,为了比较控制系统对车辆性能提升的效果,与采用Ackerman几何原理实现差速控制的四轮驱动前轮转向电动汽车进行了对比,结果如图4、图5所示。
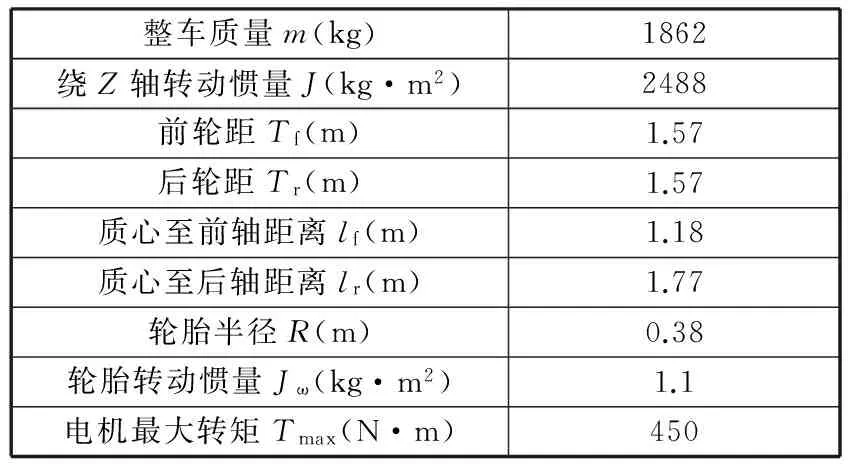
表1 车辆仿真参数
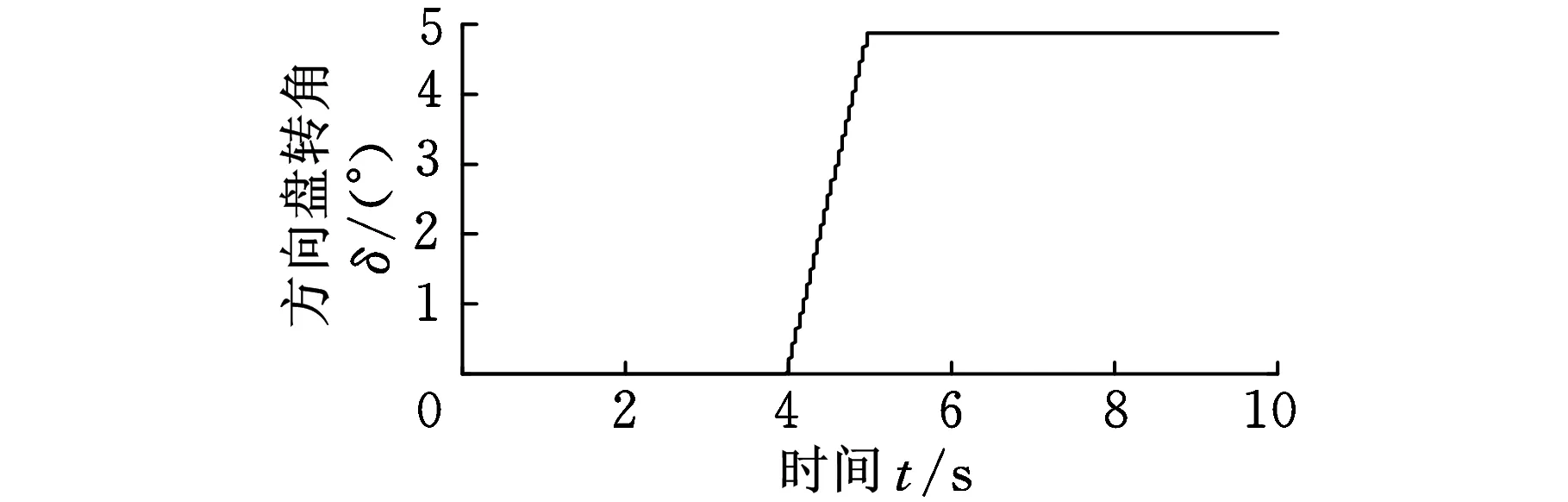
(a)方向盘转角输入
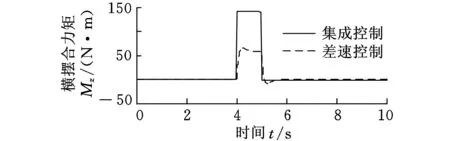
(b)横摆合力矩
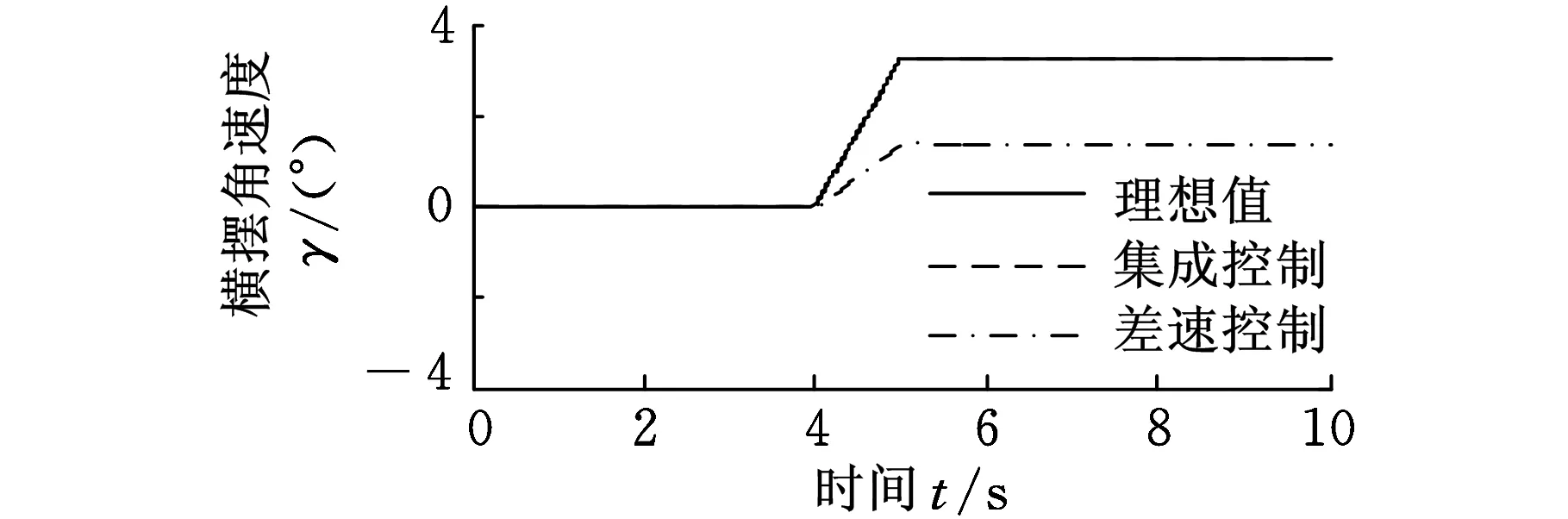
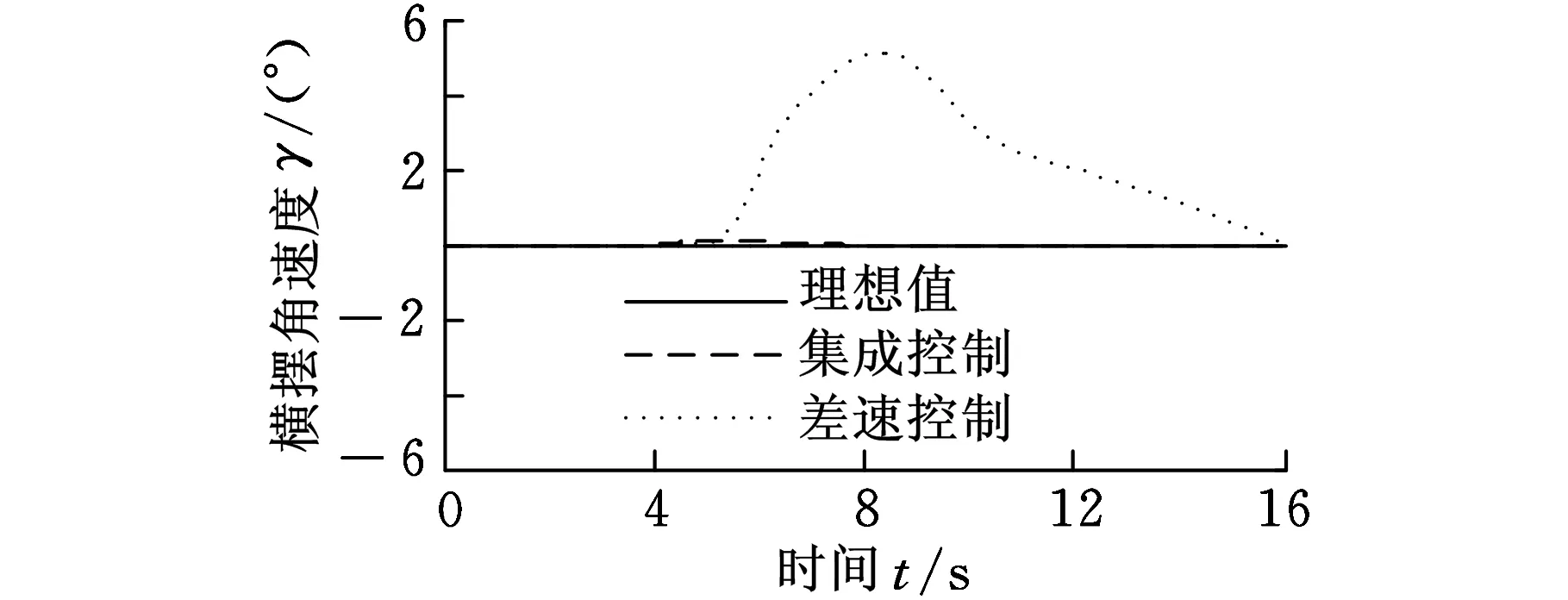
(c)横摆角速度响应曲线
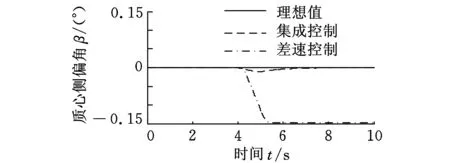
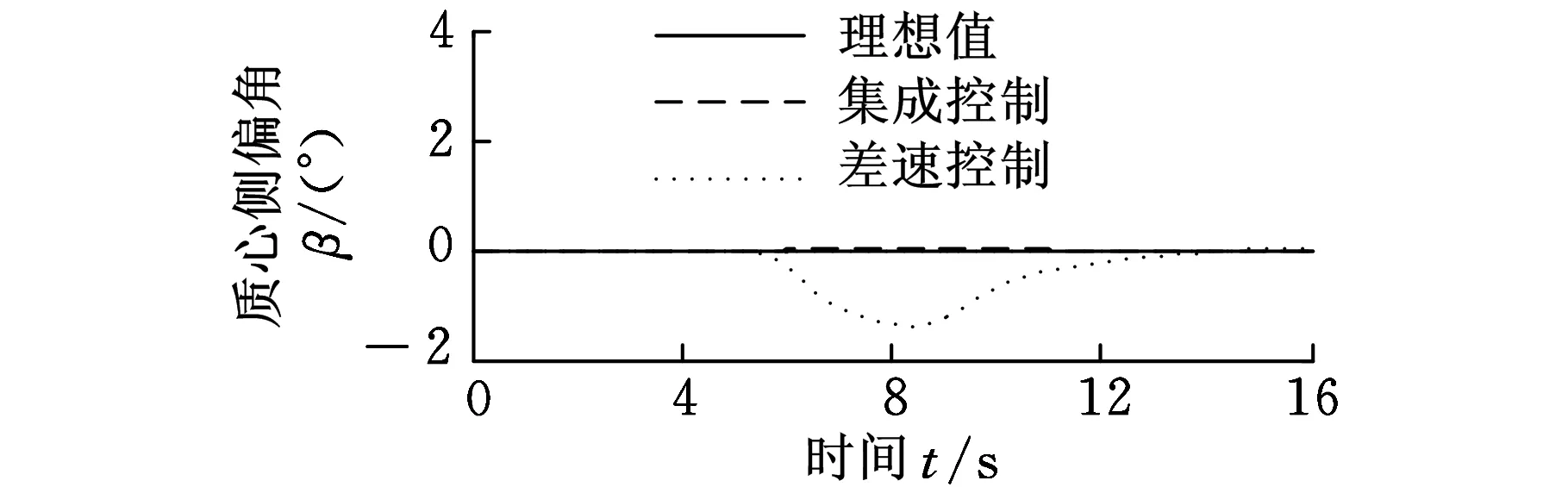
(d)质心侧偏角响应曲线图4 低路面附着系数下分层控制与差速控制车辆状态对比
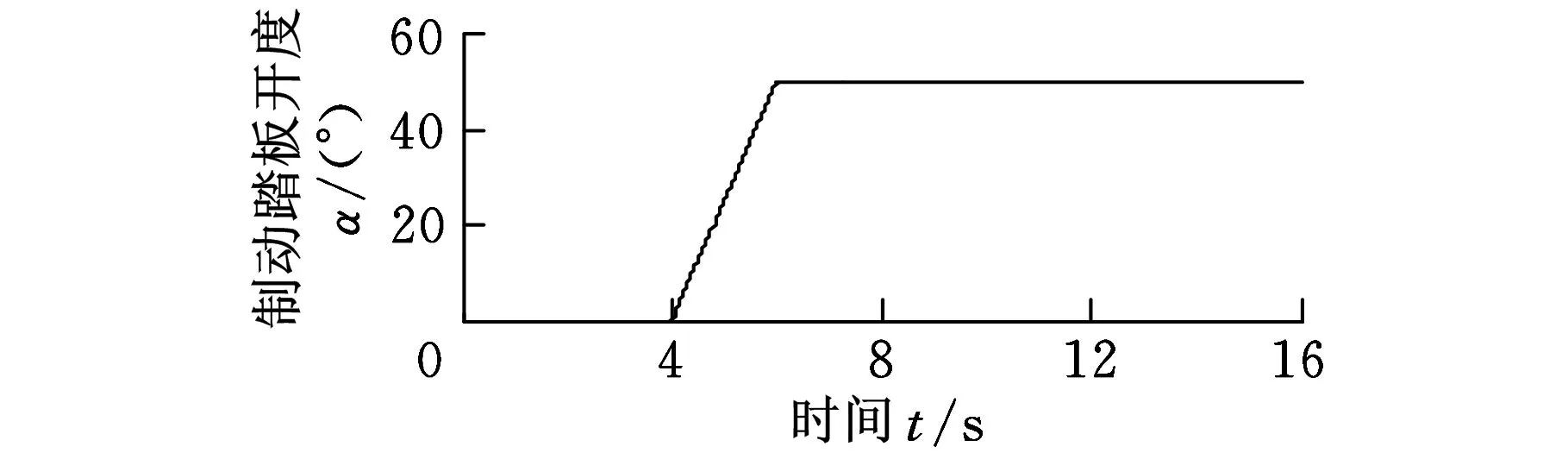
(a)车辆制动踏板开度
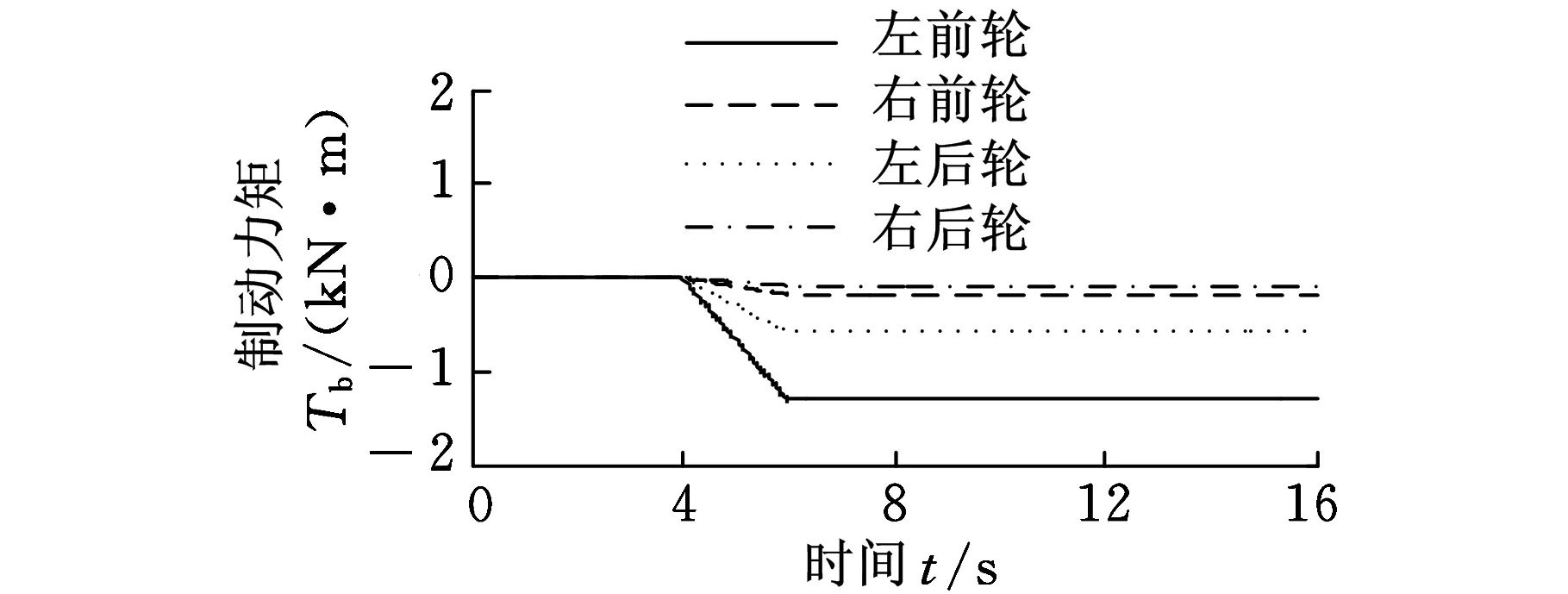
(b)制动力矩
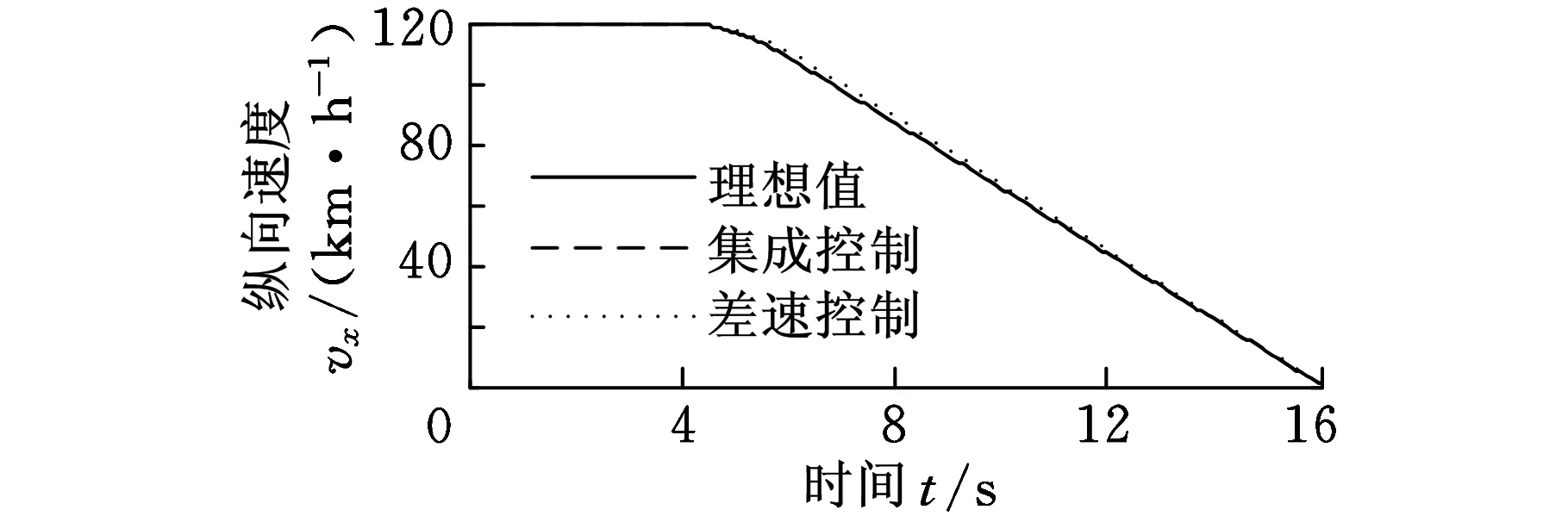
(c)纵向速度响应曲线
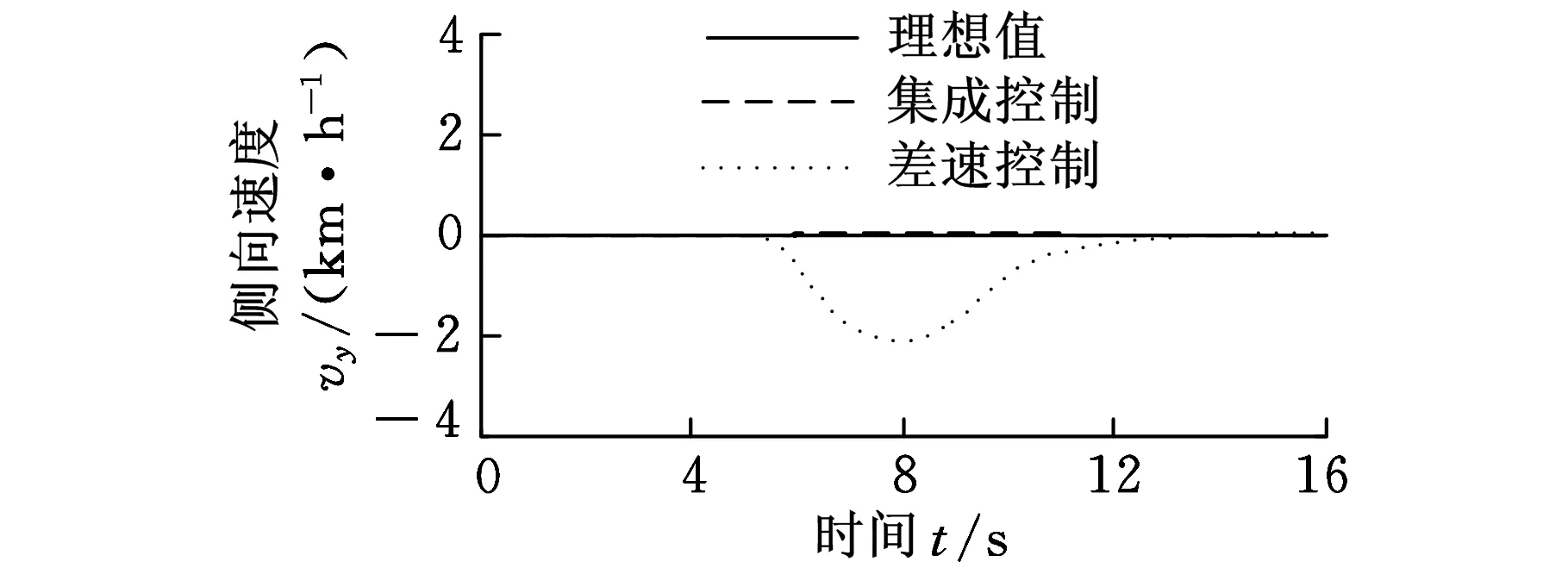
(d)侧向速度响应曲线
(e)横摆角速度响应曲线
(f)质心侧偏角响应曲线图5 对开路面下分层控制与差速控制车辆状态对比
工况①:v=120 km/h,u=0.25,在4~5 s时刻驾驶员转角给定4.87°(传动比K=17)。仿真结果如图4所示。
由仿真结果可知,差速控制车辆在转向时,质心侧偏角上存在一定偏差,误差为0.149°。这是因为前轮转向电动汽车在转向时需要一定的侧偏角才能使后轮产生侧向力,达到横摆合力距平衡,其侧偏角误差不可避免。集成控制电动汽车其侧偏角偏离理想值后恢复为零,其侧偏角短暂偏离理想值是因为车辆侧向速度无前馈通道,只存在反馈通道。其质心侧偏角可以达到稳态值零,是因为集成控制车辆可通过后轮转角,产生轮胎力,不依赖于侧偏角的产生。差速控制电动汽车横摆角速度为1.34°,集成控制车辆横摆角速度为3.24°,与理想值3.25°相比,误差仅为0.3%,稳定性增加。横摆合力距由平均63 N增至151 N,较大的横摆合力距保证了横标角速度的增益,提高了车辆的操纵性。
工况②:对开路面下的高速制动,v=120 km/h,左侧车轮u=0.25,右侧车轮u=0.85,在4~5 s时刻驾驶员给定加速度为-2 m/s,转向角为0。仿真结果如图5所示。
由仿真结果可以看出,采用差速控制和集成控制电动汽车在制动时,纵向速度都可跟踪给定,但调节机制不尽相同。电动轮汽车依靠四轮轮速自我调节机制,根据不同滑移率,四个轮毂电机分别产生相应的制动力矩,使得车辆减速。差速控制车辆前轮转角无动作,而是通过车辆产生质心侧偏角和横摆角速度而产生轮胎侧偏角,从而产生轮胎侧向力,使车辆产生侧向合力,侧偏角和横摆角速度逐渐恢复到理想值,而侧偏角产生了最大误差1.39°,横摆角速度产生了最大误差5.13°。在此过程中车辆存在侧向速度,最大偏差为2 km/h,车辆运行轨迹会偏离理想,牺牲了车辆运行稳定性。相比之下,采用集成控制4WID-4WIS电动汽车通过灵活的调整四轮制动力和四轮转角,使得车辆的侧向速度、横摆角速度和侧偏角保持在一个较低的水平上,横摆角速度最大误差仅为0.13°。
[1]贺鹏, 堀洋一.四轮独立驱动电动汽车的稳定性控制及其最优动力分配法[J].河北工业大学学报, 2007, 36(4): 26-32.
He Peng, Yoichi Hori.Stability Control and Optimum Force Distribution for 4-wheel- independent-driven Electric Vehicle[J].Journal of Hebei University of Technology, 2007, 36(4):26-32.
[2]余卓平, 姜炜, 张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报(自然科学版),2008, 36(8):1115-1118.
Yu Zhuoping, Jiang Wei, Zhang Lijun.Torque Distribution Control for Four Wheel In-Wheel-Motor Electric Vehicle[J].Journal of Tongji University
(Natural Science), 2008, 36(8): 1115-1118.
[3]续丹,王国栋,曹秉刚,等.独立驱动电动汽车的转矩优化分配策略研究[J].西安交通大学学报, 2012, 46(3): 42-46.
Xu Dan,Wang Guodong, Cao Binggang,et al.Study on Optimizing Torque Distribution Strategy for Independent 4WD Electric Vehicle[J].Journal of Xi’an Jiaotong University, 2012, 46(3): 42-46.
[4]Ono E, Hattori Y.Vehicle Dynamics Integrated Control for Four-wheel-distributed Steering and Four-wheel- distributed Traction/Barking System[J].Vehicle System Dynamics, 2006,44(2):139-151.
[5]邹广才,罗禹贡,李克强.四轮独立电驱动车辆全轮纵向力优化分配方法[J].清华大学学报(自然科学版),2009,49(5):111-115.
Zou Guangcai, Luo Yugong, Li Keqiang. Tire Longitudinal Force Optimization Distribution for Independent 4WD EV[J]. Journal of Tsinghua University(Science&Technology), 2009,49(5):111-115.
[6]Liu Xiong,Yu Zhuoping.Control Allocation of Vehicle Dynamics Control for a 4 In-wheel-motored EV[J]. IEEE Control Systems, 2009,13(2):307-311.
[7]Cong Geng,Mostefai L,Denal M,et al.Direct Yaw-moment Control of an In-wheel-motored Electric Vehicle Based on Body Slip Angle Fuzzy Observer[J]. IEEE Transactions on Industrial Electronics,2009,56 (5):1411-1419.
[8]Tabbache B,Kheloui A,Benbouzid M E H.An Adaptive Electric Differential for Electric Vehicles Motion Stabilization[J].IEEE Transactions on Vehicular Technology, 2010, 60(1):104-110.
[9]宾洋.车辆走停巡航系统的非线性控制研究[D].北京:清华大学,2006.
[10]胡运权.运筹学教程[M].3版.北京:清华大学出版社, 2012.
[11]Wang J, Longoria R G.Coordinated and Reconfigurable Vehicle Dynamics Control[J].IEEE Transactions on Control Systems Technology, 2009, 17(3): 723-732.
(编辑陈勇)
Optimal Allocation of Redundant Actuator and Active Safety Control for Wheel-motored Electric Vehicle
Ding Xiying1Wang Yanan1Li Lin1Zhang Zeyu2Wang Chunqiang1
1.Shenyang University of Technology,Shenyang,110870 2.State GRID Liaoning Electric Power Supply Co.,Ltd.,Shenyang,110870
Contraposing the new chassis structure, a hierarchical vehicle stability control strategy was used and combined the gesture tracking and chassis manipulated variable optimized allocation. The high level of the control strategy conquered the system nonlinear by adopting precise linearization control strategy, which proposed the required torque for the improved steer structure. Quadratic programming was used in the low level, which aimed at optimizing the redundant actuator,minimizing the output of the tracking errors and tire force posture parameters, and decreasing energy consumption of the vehicle. The simulation results indicate that the proposed method can enhance the vehicle handling stability,the control efficiency is also improved.
redundant actuator; optimal allocation; active safety control; hierarchical control
2014-03-28
沈阳市科学计划项目(F12-277-1-11)
U461.6DOI:10.3969/j.issn.1004-132X.2015.08.023
丁惜瀛,女,1964年生。沈阳工业大学电气工程学院教授。研究方向为电动汽车牵引及安全性控制。发表论文40余篇。王亚楠,男,1990年生。沈阳工业大学电气工程学院硕士研究生。李琳,女,1989年生。沈阳工业大学电气工程学院硕士研究生。张泽宇,男,1989年生。辽宁省电力有限公司经济技术研究院研究员。王春强,男,1988年生。沈阳工业大学电气工程学院硕士研究生。
