形状记忆合金丝驱动仿生波动鳍推进器设计与实验研究
2015-10-28王扬威王振龙
王扬威 于 凯 王振龙
1.南京航空航天大学,南京,210016 2.哈尔滨工业大学,哈尔滨,150001
形状记忆合金丝驱动仿生波动鳍推进器设计与实验研究
王扬威1于凯1王振龙2
1.南京航空航天大学,南京,2100162.哈尔滨工业大学,哈尔滨,150001
研究了一种形状记忆合金(SMA)丝驱动的仿生波动鳍推进器。在分析墨鱼鳍肌肉结构和运动机制的基础上,建立了鳍波动运动学模型,研制了基于SMA丝驱动柔性鳍单元的仿生波动鳍推进器,并进行了试验研究。结果表明,仿生推进器能实现与墨鱼鳍相似的柔性运动,波幅和推进力随SMA丝的驱动脉冲宽度的增加而增大,鳍波动推进力呈周期性变化,瞬时推力在驱动脉冲宽度80 ms时达到最大值180 mN。
墨鱼鳍;形状记忆合金丝;柔性鳍单元;仿生波动鳍
0 引言
水生生物的身体/尾鳍推进(body and caudal fin,BCF)模式具有较好的高速游动性能,其仿生样机和游动机理的研究虽取得了大量成果[1-2],但仿生样机的游动性能还无法与生物媲美。中央鳍/对鳍推进(median and/or paired fin,MPF)模式能实现6个自由度方向上的精确机动游动,具有高机动性、高效性以及良好的稳定性和可控性,更利于水下作业,逐渐成为仿生水下机器人研究领域的热点[3]。
近年来,文献[4-9]相继模仿不同生物研制了MPF模式推进仿生水下机器人。这些机器人都将电机作为驱动器,结构复杂,推进鳍面的柔性难以与生物媲美,且游动有噪声。文献[10-12]将智能材料作为驱动器,简化了执行机构,实现了柔性鳍面的无声推进游动,但其游动性能还不理想。
本文以墨鱼为仿生对象,分析其胸鳍柔性运动机制,研制形状记忆合金(shape memory alloy,SMA)丝驱动的仿生波动鳍推进器,并对推进性能进行相关试验研究。
1 墨鱼鳍的形态特征及肌肉结构
墨鱼属于软体动物门头足纲,其身体结构如图1所示。墨鱼身体除乌贼骨和嘴部的颚外没有硬骨骼支撑,通过胸鳍的波动运动和外套膜的喷射推进,能实现前进、快速后退和翻滚等游动动作。

图1 墨鱼外形图
墨鱼的鳍呈窄带形(对称分布在躯干的两侧),鳍的波动运动为游动提供推进力。墨鱼鳍的肌肉结构属于肌肉性静水骨骼结构,肌肉的伸缩运动使鳍面呈现不同的波形[13]。鳍波动运动过程中,墨鱼鳍肌肉(图2)里面上下对称、并排排列分布的横肌纤维按特定规律均匀收缩,使鳍面形成与游动推进方向反向传播的波形,推动周围的流体来获得推进力。
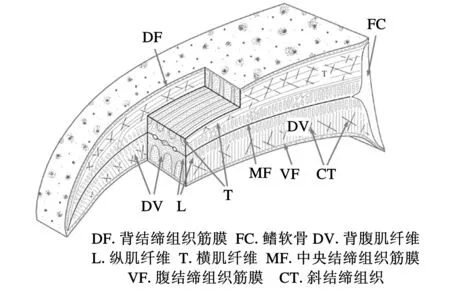
图2 墨鱼鳍肌肉结构[14]
2 墨鱼鳍波动运动建模
墨鱼鳍里面横肌纤维的收缩运动是形成鳍面波形的主要动力,将每一对上下对称的横肌纤维定义为一个鳍面单元体结构,整个墨鱼鳍的波动运动实质上是每一个鳍单元的柔性弯曲摆动运动的拟合运动。
如图3所示,为描述墨鱼鳍的空间柔性波动运动,建立了随体坐标系OBXBYBZB和鳍单元坐标系OFXFYFZF,XB轴由墨鱼尾部指向头部,ZB轴和ZF由墨鱼腹部指向背部,YF轴由鳍基线指向鳍面边缘。为建立墨鱼鳍的运动学模型,依据墨鱼鳍的形态和运动特征,作如下简化:鳍面为无厚度曲面,对称分布在躯干两侧;鳍的基线为沿躯干周围的弧线(在鳍波动的过程中,形状和长度保持不变);鳍由并排排列、在OFYFZF平面内作周期性正弦柔性弯曲摆动的鳍单元组成,每个鳍单元在弯曲过程中始终保持圆弧形,相邻鳍单元摆动的相位差相同。
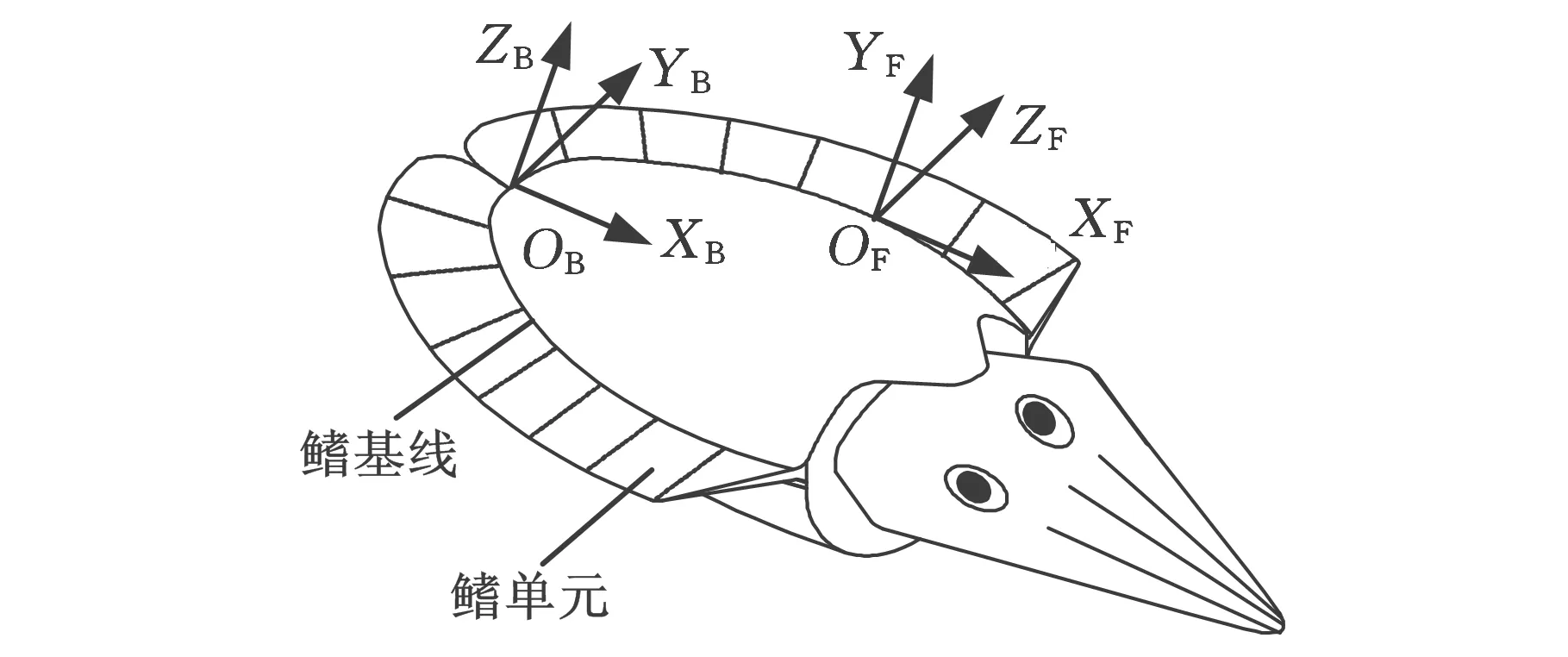
图3 墨鱼鳍坐标系
图4显示了鳍单元的弯曲摆动状态,鳍单元长度方向上任意点Q(x,y,z)的坐标可表示为
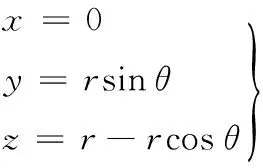
(1)
式中,r为弯曲摆动的圆弧半径,m;θ为鳍单元坐标系下Q点对应的圆心角,(°)。
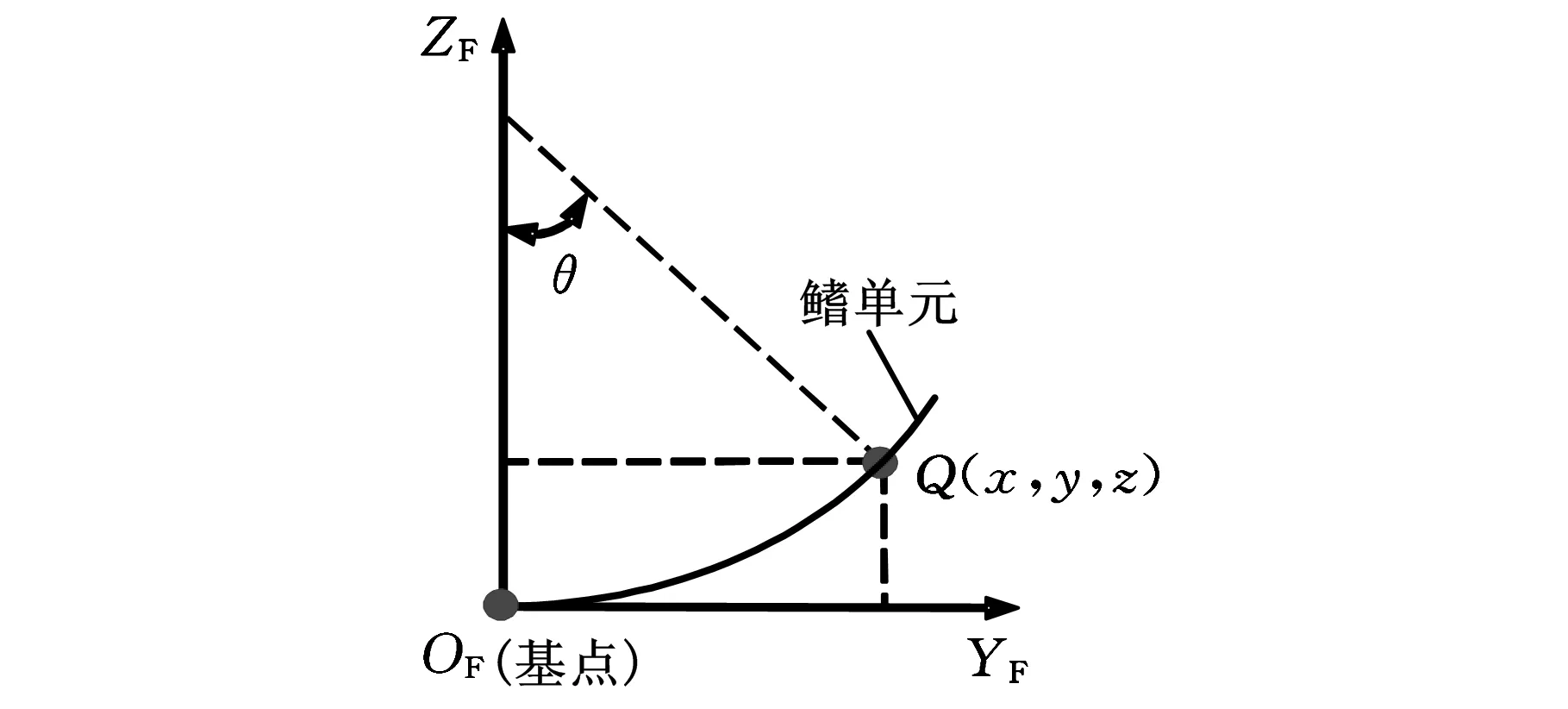
图4 鳍单元运动状态
圆心角θ随时间t的变化可表示为
θ(t)=θmaxsin(ωt+θ0)
(2)
式中,θmax为最大圆心角,(°);ω为摆动的角速度,rad/s;θ0为初始相位角,(°)。
基于简化假设,在鳍单元周期性摆动过程中,Q点对应鳍单元段的弧长l为常量。因r=l/θ,可得
(3)
假设Q点所在鳍单元的基点在随体坐标系下的坐标为(xB0,yB0,0),则墨鱼鳍的运动学方程可表示为
(4)
式中,α为YF轴和YB轴的夹角,(°)。
3 仿生波动鳍推进器的设计与实现
3.1SMA丝驱动柔性鳍单元
SMA丝的收缩运动与墨鱼鳍横肌纤维的收缩运动相似,通过对称布置的SMA丝的差动收缩运动可以实现与墨鱼鳍单元相似的柔性弯曲摆动运动。SMA丝驱动的柔性鳍单元(图5)由基体、弹性体、硅胶蒙皮和SMA丝组成。两根SMA丝对称分布在弹性体两侧, SMA丝和弹性
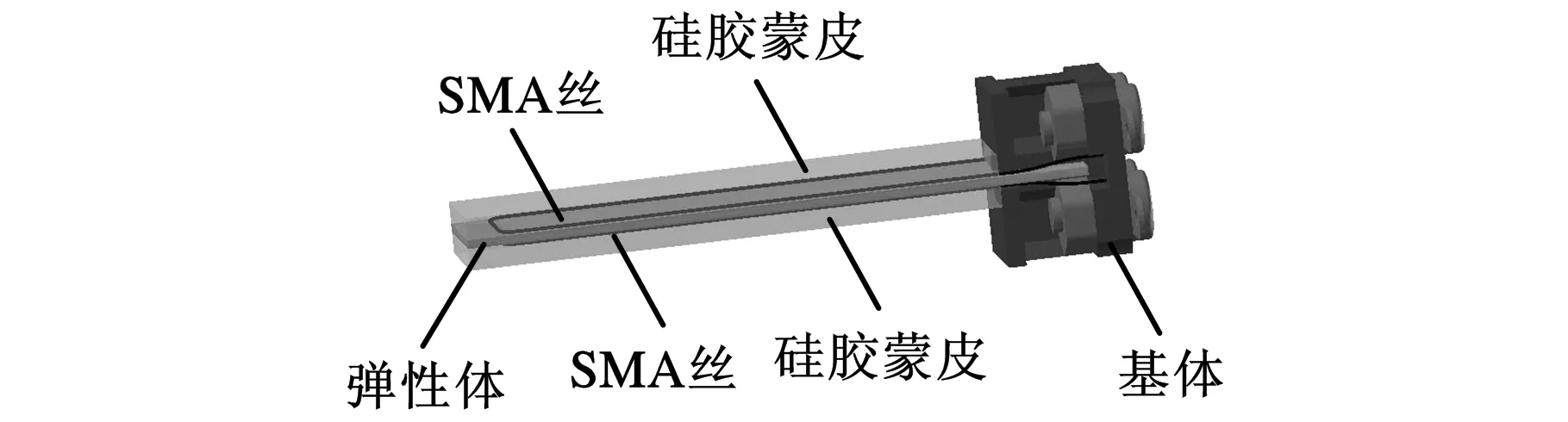
图5 SMA丝驱动鳍单元结构
体分别固定在基体上。硅胶蒙皮覆盖在SMA丝外部,并与弹性体黏结为一体。两侧SMA丝的交替收缩牵拉作用能够使柔性鳍单元产生周期性的往复柔性摆动运动。
制作的柔性鳍单元(图6)的厚度为3 mm,宽度为7 mm,弯曲段长度为50 mm,单面SMA丝的数量为2。柔性鳍单元的弹性体选用0.25 mm厚聚乙烯,蒙皮材料为704硫化硅橡胶,TiNi基SMA丝直径为0.15 mm。
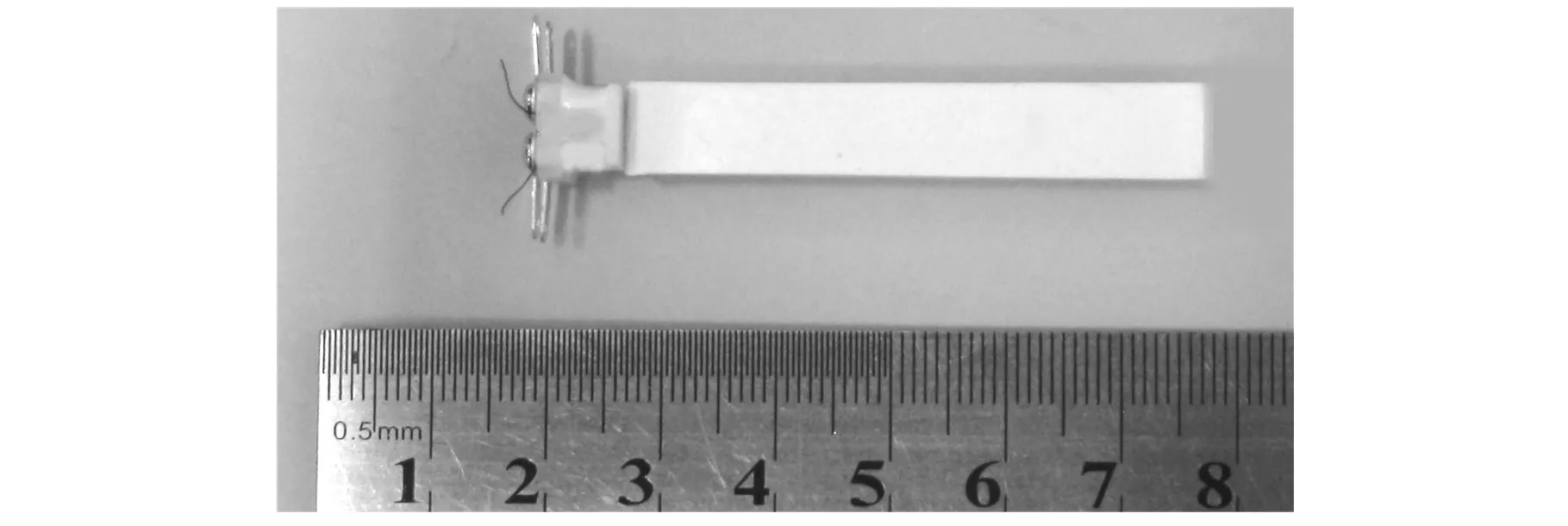
图6 柔性鳍单元
3.2仿生波动鳍推进器
仿生波动鳍的外形参照墨鱼鳍的形态,将两侧对称的墨鱼鳍简化为一个鳍面整体。仿生波动鳍中,SMA丝驱动柔性鳍单元的数量越多,对墨鱼柔性鳍面的模拟越好,控制系统也越复杂。为减少柔性鳍单元数量,在柔性鳍面中,采用等间距嵌入柔性鳍单元的方式,通过柔性鳍单元的柔性摆动来带动柔性鳍面,从而实现与墨鱼鳍柔性波动相似的运动。为保证仿生波动鳍能呈现完整的正弦波形,单侧鳍面中鳍单元不应少于5个。为此,设计由11个柔性鳍单元和柔性鳍面构成的仿生波动鳍,如图7所示,两侧对称排布5个鳍单元,可实现一个完整波长的鳍面运动,尾部布置一个柔性鳍单元来配合鳍面波动。
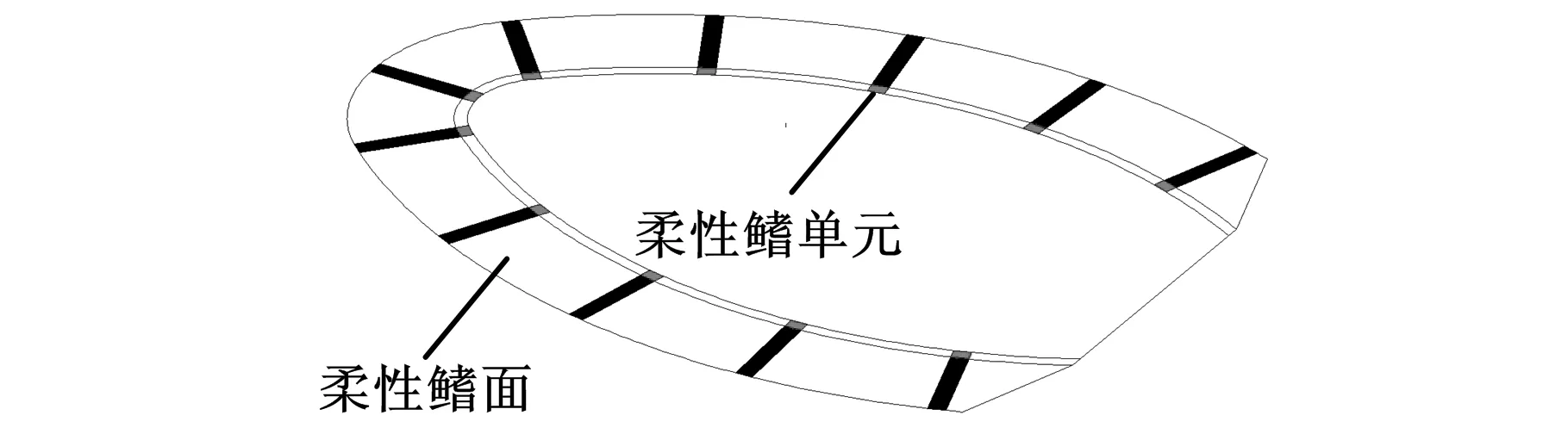
图7 仿生波动鳍结构示意图
为保证柔性鳍面能够在柔性鳍单元的带动下形成与墨鱼鳍相似的推进波,选用弹性好的人体硅胶作为柔性鳍面的材料。通过专用模具将柔性鳍单元固定,然后灌注人体硅胶,通过加热固化制成仿生波动鳍推进器,见图8。仿生波动鳍推进器长280 mm,宽260 mm,鳍面宽50 mm,总质量(不包括固定板)为142 g。
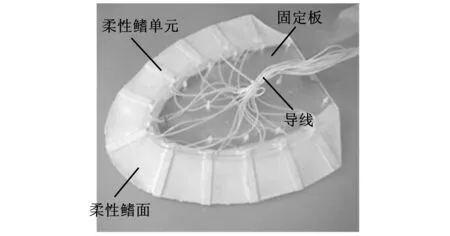
图8 仿生波动鳍推进器
4 仿生波动鳍推进器水动力实验研究
4.1仿生波动鳍推进器试验台
为了研究仿生波动鳍推进器的波动运动和推进过程中产生推进力的变化,搭建了仿生水下试验台。如图9所示,试验台由水箱、固定支架、力传感器、控制系统和PC机组成。为消除仿生波动鳍俯仰运动对测量的影响,仿生波动鳍通过前后两个力传感器与固定支架相连。固定支架安装在水箱上部,控制系统通过导线与仿生波动鳍中的SMA丝相连。力传感器数据通过PCI-1710HG数据采集卡上传至计算机。
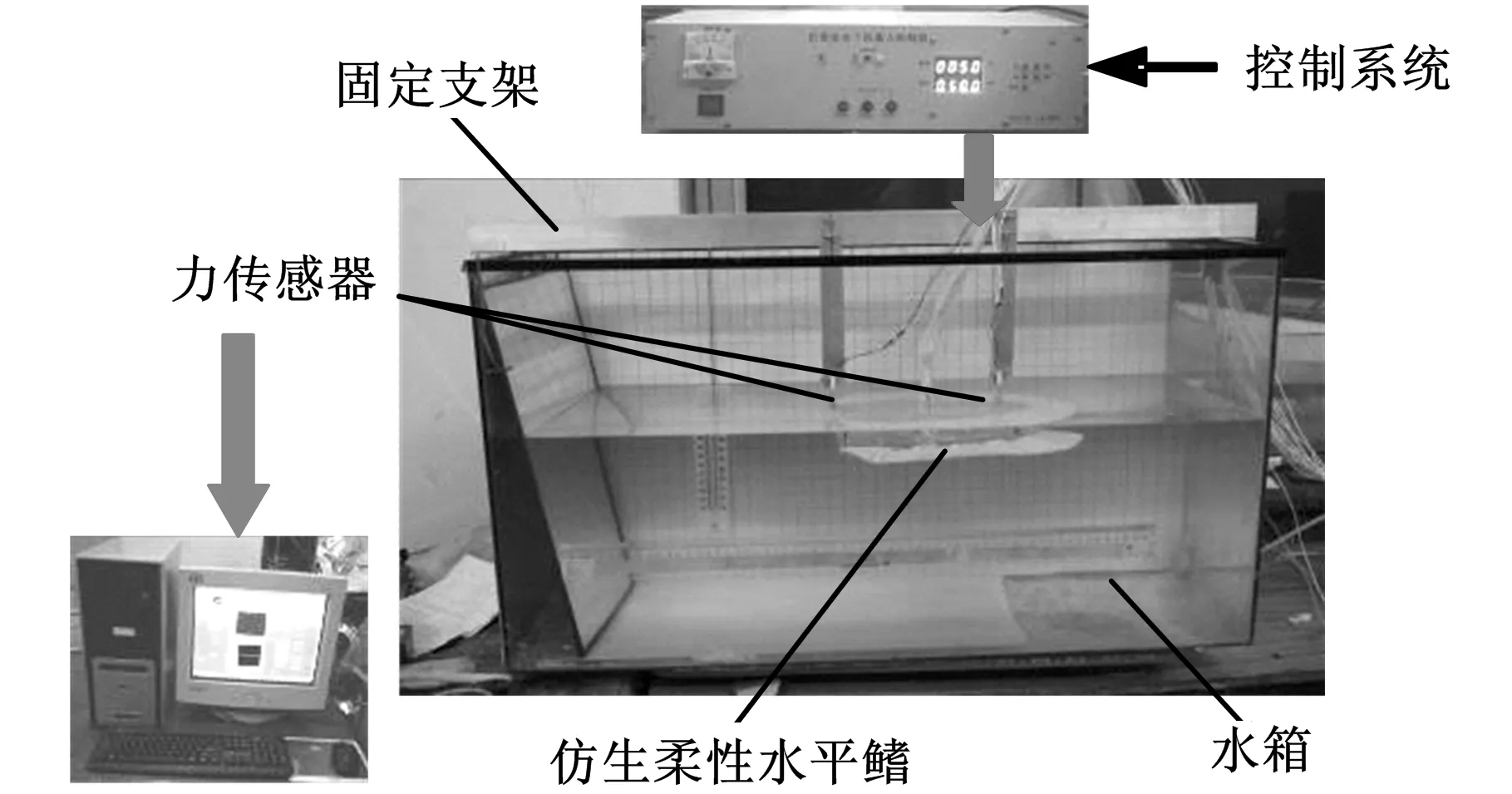
图9 仿生水下试验台
4.2柔性鳍单元和仿生波动鳍推进器实验研究
为研究SMA丝驱动鳍单元的弯曲摆动柔性,在驱动电压11.1 V和驱动脉冲宽度80ms条件下进行了实验研究。实验结果表明,SMA丝驱动鳍单元能实现的最大弯曲角为84°,弯曲摆动运动呈近似圆弧形(图10)。
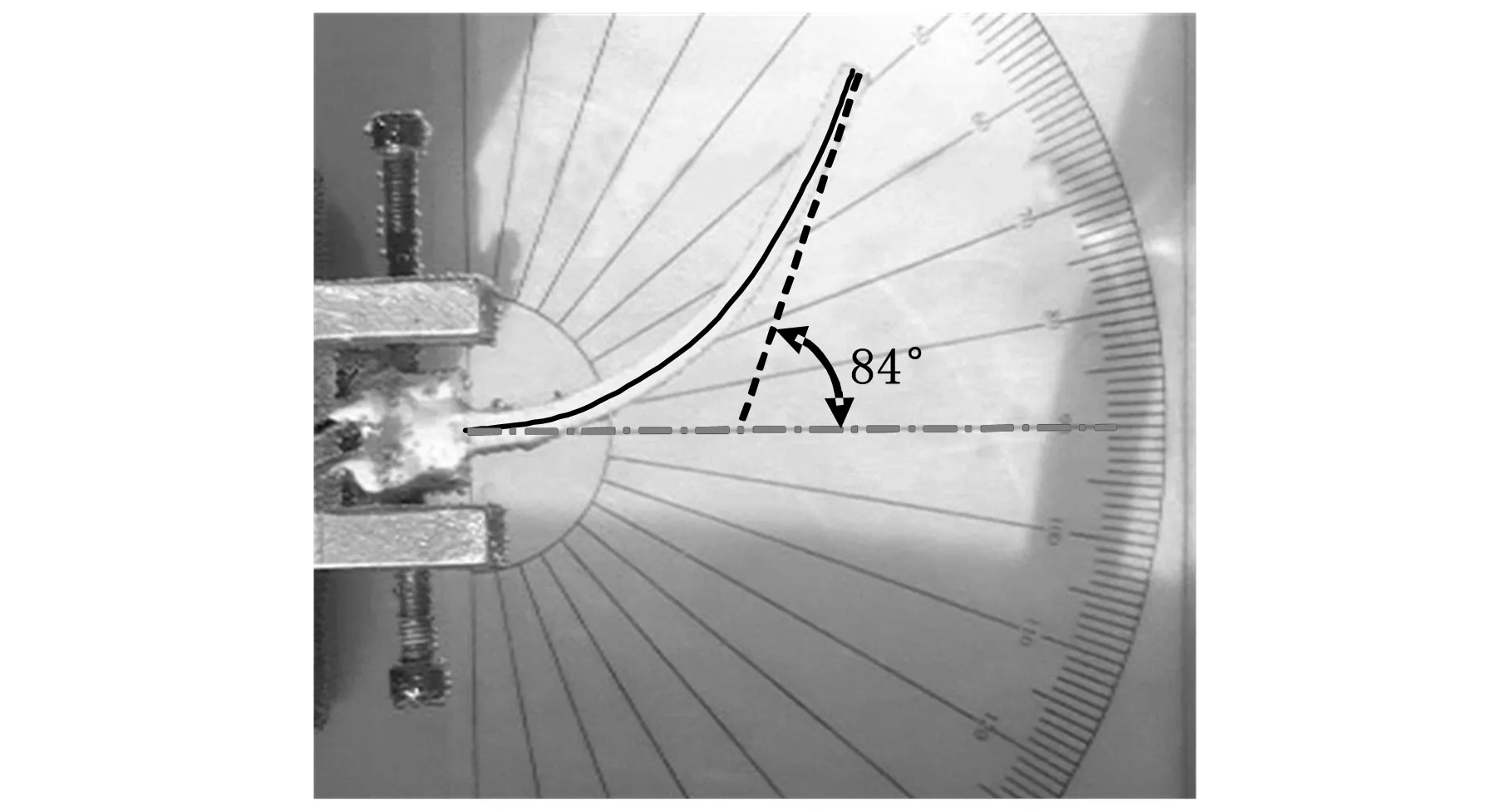
图10 鳍单元弯曲摆动状态
为研究仿生波动鳍推进器的推进性能,利用研制的水下试验台进行了一系列水动力性能测试。水温为20℃,SMA丝的驱动电压为11.1 V,驱动脉宽为30~80 ms,鳍单元内布置在弹性体两侧的SMA丝的动作相位差取驱动脉宽的10倍,相邻鳍单元之间的驱动相位差为驱动脉宽加40 ms。
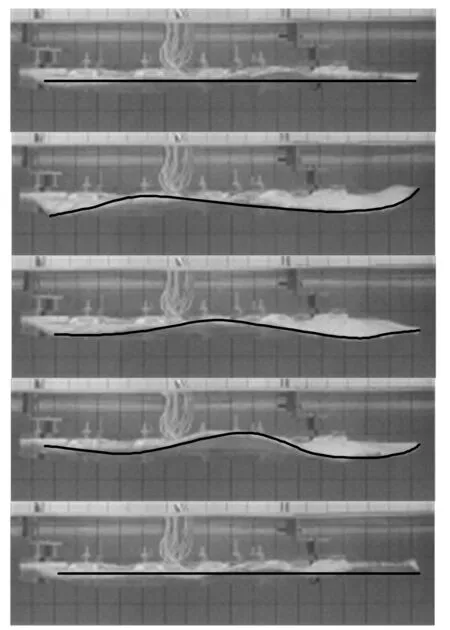
图11 鳍波动图像序列
SMA丝的驱动脉宽为60 ms时,仿生波动鳍的波动运动如图11所示。由图11可以看出:基于SMA丝驱动柔性鳍单元的仿生波动鳍能够实现与墨鱼鳍相似的波动运动;在整个波动运动周期内,各柔性鳍单元的摆幅差异导致鳍面呈现非等幅波动。
图12所示为60 ms驱动脉冲宽度的波动鳍产生的推进力随时间变化的曲线。从图12可以看出:仿生鳍在波动运动过程中,能够产生推进力,且推进力呈周期性变化;仿生鳍波动运动产生的平均推力为正值,即平均推力方向与鳍波动时鳍面波的传播方向相反。
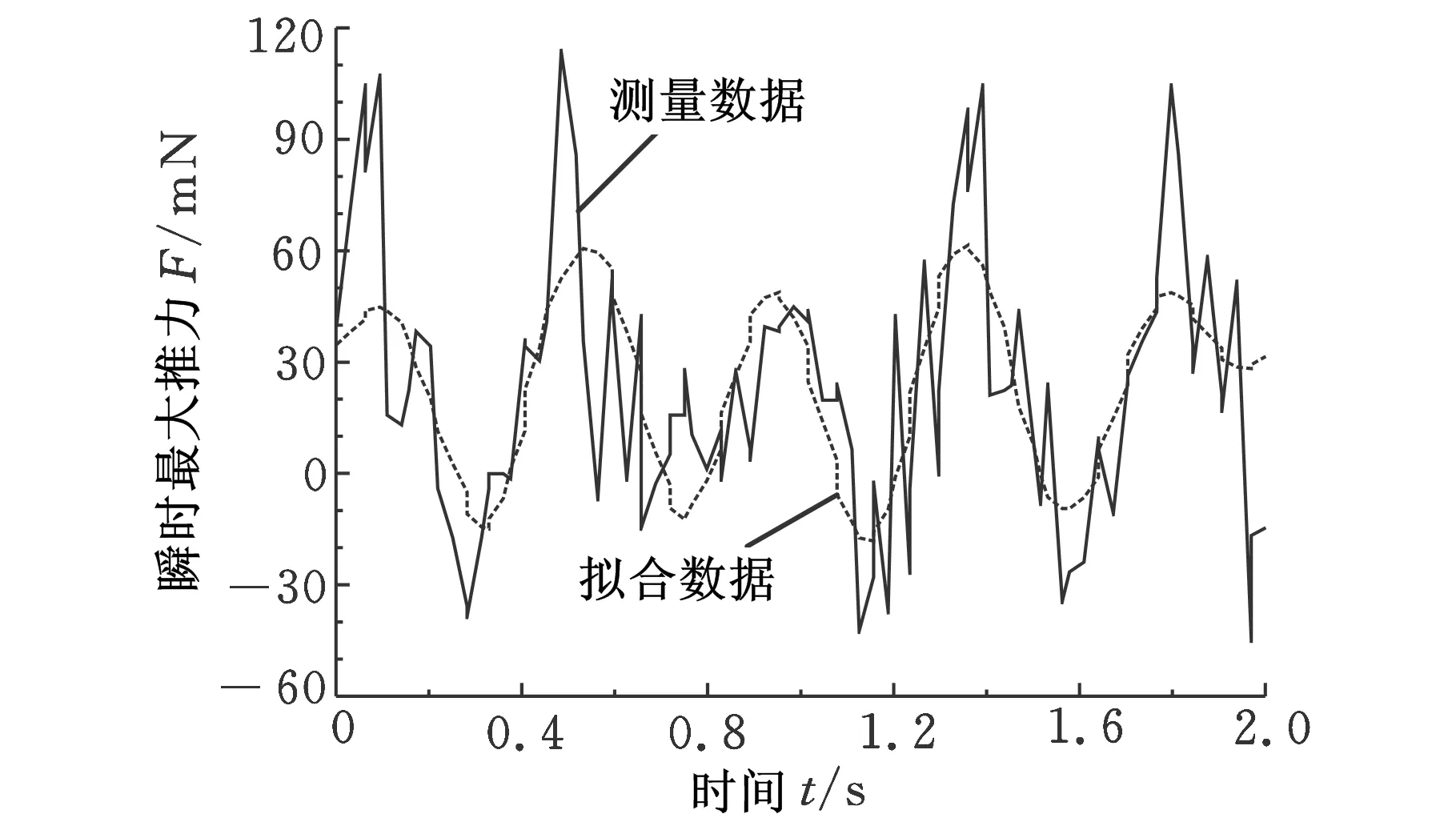
图12 推力随时间变化曲线
不同驱动脉冲宽度条件下,仿生鳍的平均波幅和瞬时最大推进力的变化曲线如图13所示。结果表明,仿生波动鳍的最大瞬时推力和平均波幅随着SMA丝的驱动脉宽增加而增大,80 ms驱动脉宽的瞬时推力最大值达到180 mN。
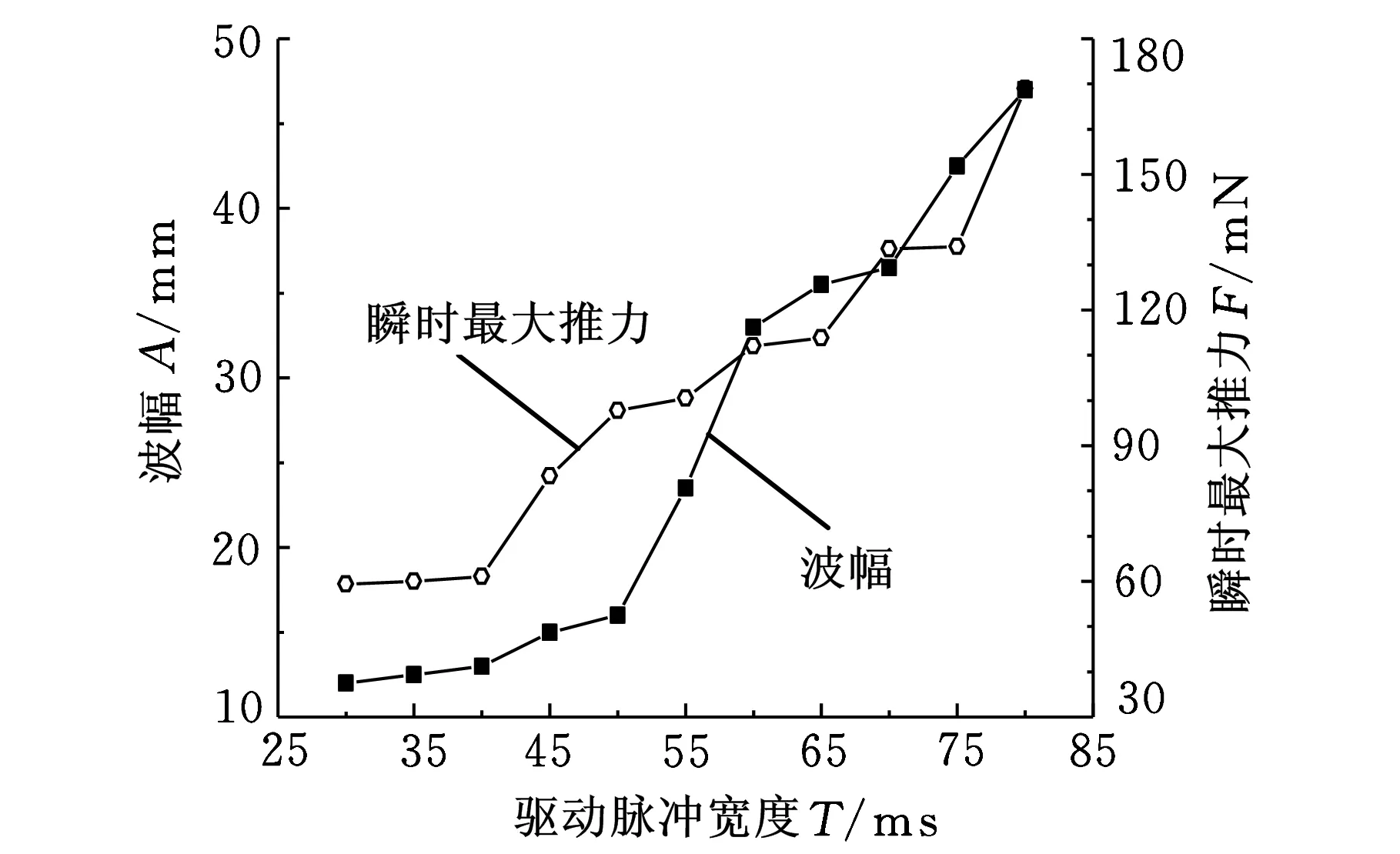
图13 波幅和瞬时推力变化曲线
5 结语
SMA丝驱动仿生波动鳍推进器具有结构简单、驱动方便和推进无噪声等优点,柔性波动运动能更好地实现涡流的精确控制。研究结果为后续仿生波动鳍的结构优化和高效控制策略研究奠定了基础。该项研究为未来高性能仿生水下机器人研制提供了一种新的仿生推进器形式。
[1]魏清平,王硕,谭民,等.仿生机器鱼研究的进展与分析[J].系统科学与数学,2012,32(10):1274-1286.
Wei Qingping,Wang Shuo,Tan Min,et al.Research Development and Analysis of Biomimetic Robotic Fish[J].Journal of Systems Science and Mathematical Sciences,2012,32(10):1274-1286.
[2]刘焕兴,苏玉民,张曦,等.尾鳍柔性变形对仿金枪机器鱼自主游动的影响[J]. 华中科技大学学报(自然科学版),2014,42(3):117-121.
Liu Huanxing,Su Yumin,Zhang Xi,et al.Effect of Caudal-fin Flexible Deformation on Self-propelled Swimming of a Tuna-like Bio-mimetic Underwater Vehicle[J].Journal of Huazhong University of Science and Technology(Nature Science Edition),2014,42(3):117-121.
[3]王田苗,杨兴帮,梁建宏.中央鳍/对鳍推进模式的仿生自主水下机器人发展现状综述[J].机器人,2013,35(3):352-362,384.
Wang Tianmiao,Yang Xingbang,Liang Jianhong.A Survey on Bionic Autonomous Underwater Vehicles Propelled by Median and/or Paired Fin Mode[J].Robot,2013,35(3):352-362,384.
[4]Rahman M M,Sugimori S,Miki H,et al. Braking Performance of a Biomimetic Squid-like Underwater Robot[J]. Journal of Bionic Engineering,2013,10:265-273.
[5]Cloitre A,Subramaniam V,Patrikalakis N,et al.Design and Control of a Field Deployable Batoid Robot[C]//The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics.Roma,2012:24-27.
[6]Cao Y,Bi S,Cai Y,et al.Applying Coupled Nonlinear Oscillators to Imitate Swimming Modes of Cow-nosed Rays[C]//Proceeding of the IEEE International Conference on Robotics and Biomimetics(ROBIO).Shenzhen,China,2013:552-557.
[7]杨少波,韩小云,邱静,等.仿牛鼻鲼机器鱼胸鳍的时间非对称摆动研究[J].中国机械工程,2011,22(5):588-591,596.
Yang Shaobo,Han Xiaoyun,Qiu Jing,et al.Research on Pectoral Fins Oscillating Asymmetrically in Time of a Cownose-like Robotic Fish[J].China Mechanical Engineering,2011,22(5):588-591,596.
[8]Wang G,Ma X,Hu T,et al.Experimental and Analytical Study on Factors Influencing Biomimetic Undulating Fin Propulsion Performance Based on Orthogonal Experimental Design[J].Advanced Robotics,2013,27(8):597-609.
[9]Wei Q P,Wang S,Dong X,et al.Design and Kinetic Analysis of a Biomimetic Underwater Vehicle with Two Undulating Long-fins[J].Acta Automatica Sinica,2013,39(8):1330-1338.
[10]Takagi K,Yamamura M,Luo Z W,et al.Development of a Rajiform Swimming Robot Using Ionic Polymer Artificial Muscles[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing,2006:1861-1866.
[11]Yan Q,Wang L,Liu B,et al.A Novel Implementation of a Flexible Robotic Fin Actuated by Shape Memory Alloy[J].Journal of Bionic Engineering,2012,9(2):156-165.
[12]Wang Z,Wang Y,Li J,et al.A Micro Biomimetic Manta Ray Robot Fish Actuated by SMA[C]//2009 IEEE International Conference on Robotics and Biomimetics(ROBIO).Guilin,China,2009:1809-1813.
[13]Kier W M,Thompson J T.Muscle Arrangement,Function and Specialization in Recent Coleoids[J].Berliner Paläobiol Abh,2003,3:141-162.
[14]Wang Z,Hang G,Li J,et al.A Micro-robot Fish with Embedded SMA Wire Actuated Flexible Biomimetic Fin[J].Sensors and Actuators A:Physical,2008,144:354-360.
(编辑张洋)
Research on Design and Experiment of a Biomimetic Undulating Fin Propeller Actuated by SMA Wires
Wang Yangwei1Yu Kai1Wang Zhenlong2
1.Nanjing University of Aeronautics and Astronautics,Nanjing,210016 2.Harbin Institute of Technology,Harbin,150001
A study about a biomimetic undulating fin propeller actuated by SMA wires was presented.Firstly,the structure and function of muscular hydrostats of cuttlefish fin were analyzed,and the kinematic model of the cuttlefish’s fin undulatory motion was built.Secondly,a biomimetic undulating fin propeller actuated by SMA wires was developed.Finally,the hydrodynamic performance of the biomimetic propeller was tested.The results show that the flexible fin undulatory motion of biomimetic propeller is similar to fin of cuttlefish.The undulatory amplitude and thrust increases with increasing the actuating pulse width.The instantaneous maximum thrust is 180 mN at actuating pulse width 80 ms.
fin of cuttlefish;shape memory alloy(SMA) wire;flexible fin unit;biomimetic undulating fin
2014-05-08
国家自然科学基金资助项目(50775049);江苏省自然科学基金资助项目(BK20130796);高校基本科研业务费专项资金资助项目;南京航空航天大学研究生创新基地(实验室)开放基金资助项目(KFJJ201437)
TH69;TH122DOI:10.3969/j.issn.1004-132X.2015.08.004
王扬威,男,1980年生。南京航空航天大学机电学院讲师。主要研究方向为仿生机器人和机电控制及自动化。发表论文20余篇。于凯,男,1991年生。南京航空航天大学机电学院硕士研究生。王振龙,男,1963年生。哈尔滨工业大学机电工程学院教授、博士研究生导师。
