应用ZigBee技术的航天器内部三维空间定位方案
2015-10-28龙吟郭佩夏奕张璐杨佳欣
龙吟 郭佩 夏奕 张璐 杨佳欣
(中国空间技术研究院载人航天总体部,北京 100094)
应用ZigBee技术的航天器内部三维空间定位方案
龙吟 郭佩 夏奕 张璐 杨佳欣
(中国空间技术研究院载人航天总体部,北京 100094)
针对航天器内部缺少三维空间定位方案的问题,提出一种应用紫蜂(ZigBee)技术的无线传感器网络定位方案,即通过在航天器内部布置ZigBee无线传感器网络,设置若干数量的参考节点和未知节点,利用参考节点的先验位置信息,以及针对未知节点的测距信息,完成对未知节点的三维空间定位。建立基于参考节点平面的三维空间坐标系,根据到达角度(AOA)计算出未知节点的法向坐标(Z坐标),将未知节点投影至参考节点所在平面(XOY平面),利用三边定位法计算出未知节点在XOY平面的坐标。该方案理论上最少只需要6个参考节点,就可以实现对航天器内部未知节点的定位,并且不需要时间同步,适合于无线传感器网络的低复杂度设计需求;利用到达时间差(TDOA)算法进行AOA计算,通过对参考节点进行分层布局,避免使用复杂的天线阵列技术。仿真验证结果表明:本文方案具有较高的定位精度,同时具有较低的硬件和组网要求,以及较低的计算和通信开销,适合于航天器内部的三维空间定位。
航天器内部;三维空间定位;紫蜂技术;到达时间差;到达角度
1 引言
随着航天技术的快速发展,航天器规模的扩大,地面须要获取航天器内部的实时定位信息。例如,载人航天器可能具备多个舱段,要容纳若干航天员在各个舱段内工作和活动,因此获取航天员的实时位置信息非常重要。常用的GPS定位方法精度高,速度快,但主要应用于室外,当GPS接收机在航天器内部工作时,受到航天器舱体的影响,信号将大大衰减,变得十分微弱,从而达不到定位的要求。
目前,室内定位主要依靠无线传感器网络。按照传感器网络类型,分为超声波、紫蜂(Zigbee,802.15.4)、蓝牙(802.15.1)、WiEi(802.11b)、红外数据协会(Ir DA)、无线射频识别(REID)等。其中,ZigBee技术比蓝牙和WiEi的传输速率低,能耗小,设计简单,制造成本低,能够很好地满足无线传感器网络三维空间定位的需求。
按照测距原理,室内定位算法分为测距和非测距两种。前者定位精度高,但是要配套额外的测距硬件,主要包括到达时间 (TOA)[1]、到达时间差(TDOA)[2]、到达角度(AOA)[3]、接收信号强度指示(RSSI)[4]、指纹识别等;后者定位精度低,但是硬件配套简单,主要包括质心定位算法。上述定位算法均是针对二维空间定位,无法直接应用于三维空间定位。针对三维空间定位,目前提出了Landscape-3D[5]算法、基于球面坐标的三维定位(SLBS)算法[6]及近似三角形内点测试(APIT)算法[7]。Landscape-3D算法和SLBS算法要依靠移动的锚节点周期性地广播自身位置信息,网络中未知节点通过接收到的位置信息结合自身复杂的算法来确定自身位置,因此对锚节点硬件要求较高,必须支持移动,并且需要较高的可靠性。APIT算法采用球壳分割方法,算法复杂度较高,计算开销较大。
目前,国内外已经开展对楼宇建筑的室内定位研究,但尚无对航天器内部三维空间定位的研究。基于此,本文提出一种应用ZigBee技术的航天器内部三维空间定位方案。该方案采用ZigBee技术进行无线传感器网络部署,通过基于AOA和RSSI的三维空间定位算法对传统二维空间定位算法进行扩展和改进,可实现航天器内部的三维空间定位。
2 定位算法
定位系统由参考节点和未知节点组成。参考节点是已知位置并协助未知节点定位的节点NR(NR1,NR2,NR3,…),未知节点是需要定位的节点(NU),如图1所示。
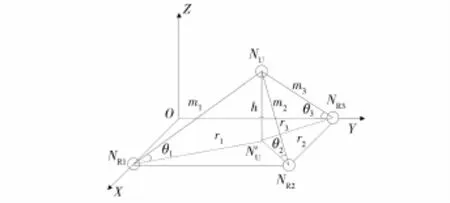
图1 定位系统Eig.1 Localization system
假设网络中的所有参考节点均位于同一平面XOY,选其中的NR1,NR2,NR3进行分析。未知节点NU在XOY平面上的投影为N′U,NU到NR1,NR2,NR3的连线与XOY平面的夹角分别为θ1,θ2,θ3,NU到XOY平面的法线长度为h,因此NU的位置信息由N′U和h联合确定。设NU在三维空间的坐标为(x,y,z),N′U在XOY平面的坐标为(x′,y′),则满足
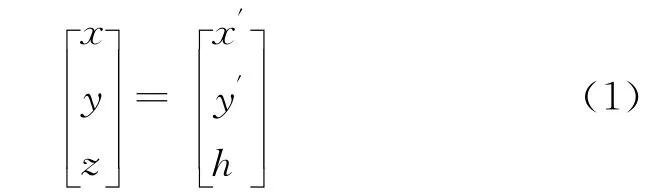
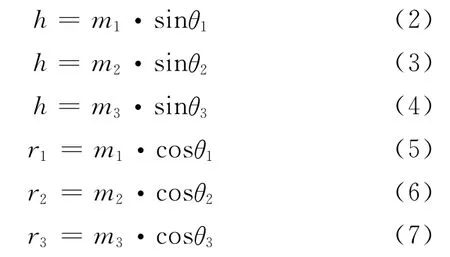
假设NU到XOY平面上NR1,NR2,NR3的距离分别为m1,m2,m3,N′U到NR1,NR2,NR3的距离分别为r1,r2,r3,根据几何关系有
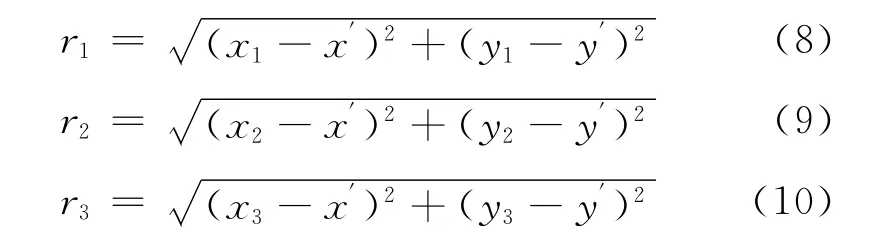
假设NR1,NR2,NR3在XOY平面的坐标分别为(x1,y1),(x2,y2),(x3,y3),则满足

在NU上配置超声波和射频发射器,在NR上配置超声波和射频接收机。NU周期性地同时广播超声波和射频2种类型的测距信号,NR接收2种测距信号,通过判断接收到信号的时间差tTDOA,利用TDOA算法计算两者的距离d。

式中:v为超声波的传播速度;c为光速。
图2为AOA定位算法示意。P表示NU的位置;S和D表示参考节点NR和N′R的位置,两者的距离为L。通过D点向PS做垂线DQ,当满足L≪d时,PD与PQ近似相等,因此SQ相当于NU到NR的距离d1和NU到N′R的距离d2之差,即满足
利用BP人工神经网络预测天然气中重组分对净化装置的影响……………………………………………………………(6):1
式中:d1和d2均通过式(13)求得;L为已知值。
AOA定位算法存在相位模糊度问题,即θ可能在[0,π],也可能在[-π,0],这一问题可根据实际定位场景设置参考节点和先验知识来判别。依据式(15)求得图1中的θ1,再按照式(12)即可求得未知节点的三维空间坐标。
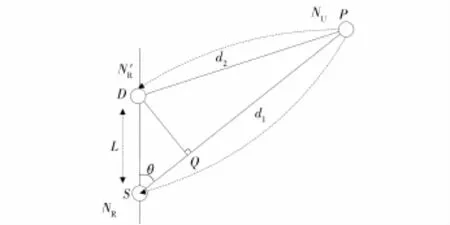
图2 AOA定位算法Eig.2 AOA localization algorithm
3 定位方案
以载人航天器为例。载人航天器由若干舱段组合而成,在每个舱段里布设若干参考节点,位置是已知的。在航天员的航天服上安装ZigBee发射器,周期性地广播信号。参考节点接收航天员发出的广播信号,实时计算航天员的位置信息,并将计算结果送到网关,网关再将位置信息送到1553B总线上,供地面工作人员实时掌握航天员的位置信息。图3为载人航天器内部定位场景示意。
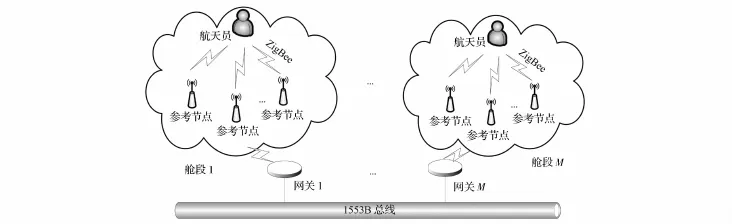
图3 载人航天器内部定位场景Eig.3 Localization scenario inside manned spacecraft
无线传感器网络的布局采用如图4所示的方案:同一平面内的参考节点采用随机分布的方式布局,数量不少于3个,并且不在同一条直线上;将航天器内部划分为若干个平面,覆盖范围为整个载人航天器,相邻平面之间的距离规定为L,相邻平面的各对参考节点的平面坐标相同。
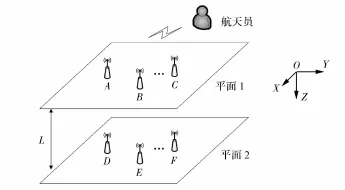
图4 参考节点分层布局Eig.4 Hierarchical deployment of reference nodes
对相邻平面的平面坐标相同的参考节点进行ID节点号分配,以2个平面的参考节点为例(见表1)。实际测试过程分为2步进行:①位于相邻平面且具有相同平面坐标的一对参考节点(A和D,B和E,C和F),收到未知节点发出的测距信号后,进行AOA定位算法运算,计算出未知节点的法向坐标(Z坐标)。②按照上述①的方法,计算出未知节点在参考节点平面的投影到该平面所有参考节点的距离,按照三边定位法[8]选择距离相同的3个参考节点,利用它们的XOY平面坐标计算出未知节点的XOY平面坐标。可见,此方案理论上最少只需要6个参考节点就可以实现对航天器内部未知节点的定位,并且不需要时间同步,适合于无线传感器网络的低复杂度设计需求。
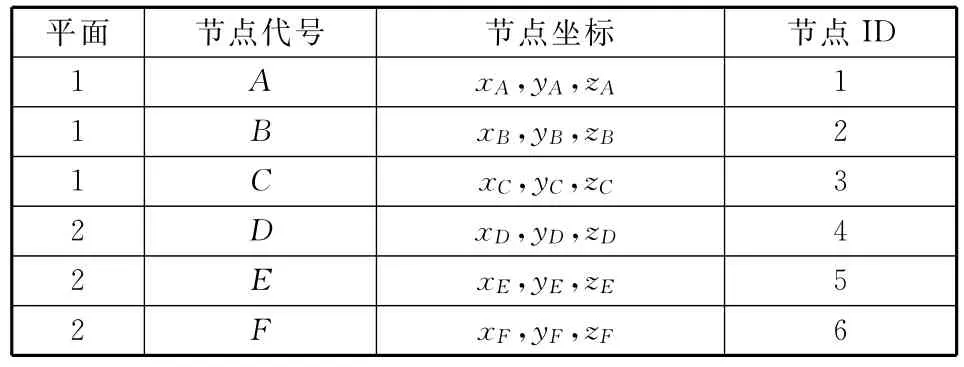
表1 参考节点ID分配Table 1 Allocation of reference node ID
为了提高定位精度,采用多次测量求平均值的方法对测距结果进行求精,一般选择测量10次。为了提高AOA定位算法的定位精度,要剔除未知节点离参考节点太近的情况,即不满足L≪d的情况。通过判断参考节点收到超声波和射频2种类型测距信号的时间差tTDOA,计算出d=tTDOA/(1/v-1/c)。规定d/L<10,即tTDOA/[(1/v-1/c)L]<10时,未知节点距离参考节点过近,不满足L≪d,剔除此次测量值。
方案流程如图5所示。
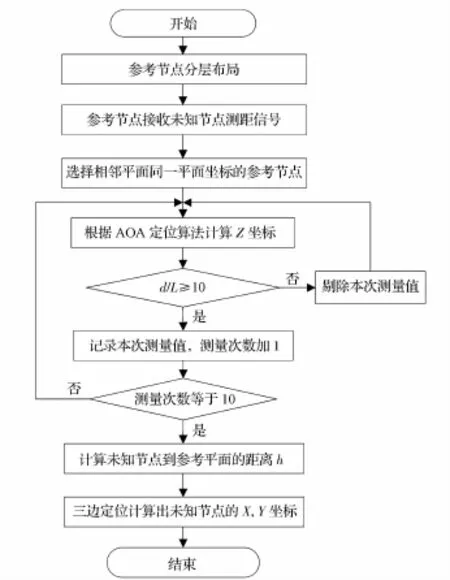
图5 定位方案流程Eig.5 Process of localization scheme
4 仿真验证
仿真场景为某航天器,在航天器内部部署无线传感器网络。对航天器内部进行三维空间坐标建模,定义2个相互平行的参考平面,分别在2个参考平面上部署参考节点A~F。以参考节点A为坐标原点O,参考节点A,B,C所在平面为XOY平面,建立三维空间坐标系,如图6所示。参考节点A~F的三维空间坐标如表2所示。按照本文方案、Landscape-3D算法和APIT算法对未知节点进行定位,并对未知节点的定位结果和实际位置进行比对,如表3所示。本文方案与Landscape-3D算法相比,无需动态组网,硬件要求大幅降低,并且定位精度有所提升;与APIT算法相比,计算和通信开销大幅降低,定位精度也大幅提升。本文方案对网络布局有一定的要求,即要进行分层布局,层数不少于2,每层参考节点数不少于3,这可以在航天器舱内布局设计上解决。另外,本文方案的定位精度随着参考节点部署密度的增加可以进一步提升,因而更适合于航天器内部的三维空间定位。
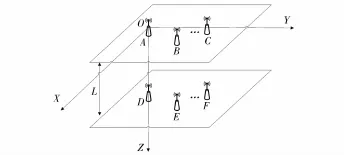
图6 三维空间坐标系Eig.6 Three-dimensional coordinate system
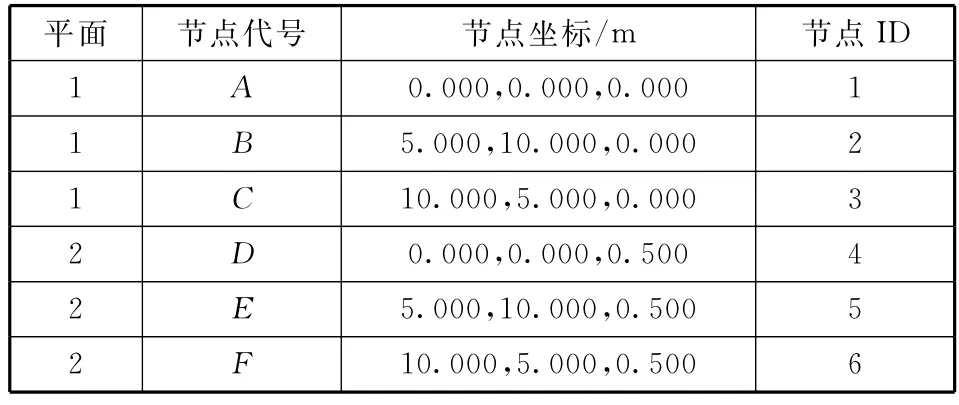
表2 参考节点布局Table 2 Placement of reference nodes

表3 定位结果比较Table 3 Comparison of localization results
5 结束语
本文提出一种应用ZigBee技术的航天器内部三维空间定位方案,通过在航天器内部进行无线传感器网络部署实现定位。对参考节点进行分层部署,可消除Landscape-3D算法对移动锚节点的需求,并且对硬件要求较低,具有较低的计算和通信开销。与APIT算法相比,本文方案具有较高的定位精度,且定位精度随着参考节点部署密度的增加可以进一步提升,可为航天器内部定位提供参考。
(
)
[1]Guo Qiangmao,Baris Eidan.Localization algorithms and stragedies for wireless sensor networks[M]New York:Hershey Information Science Reference,2009
[2]Lu Xiaofeng,Pan Hui,Don Towsley,et al.Anti-localization anonymous routing for delay tolerant network[J].Computer Networks,2010,54(11):1899-1911
[3]D Niculescu,B Nalh.Ad hoc positioning system(APS)using AOA[C]//Proceedings of the 22nd Annual Joint Conference of the IEEE Computer and Communications Societies(INEOCOM'03).New York:IEEE,2003:1734-1743
[4]N Patwari,A O Hero III,M Perkins,et al.Relative location estimation in wireless sensor networks[J].IEEE Transactions on Signal Processing,2003,51(8):2137-2148
[5]L Q Zhang,X B Zhou,Q Cheng.Landscape-3D:a robust localization scheme for sensor networks over complex 3D terrains[C]//Proceedings of the 31st IEEE Conference.New York:IEEE,2006:239-246
[6]戴桂兰,赵冲冲,邱岩.一种基于球面坐标的无线传感器网络三维定位机制[J].电子学报,2008,36(7):1297-1303 Dai Guilan,Zhao Chongchong,Qiu Yan.A localization scheme based on sphere for wireless sensor network in 3D[J].Acta Electronica Sinica,2008,36(7):1297-1303(in Chinese)
[7]吕良彬,曹阳,高洵,等.基于球壳交集的传感器网络三维定位算法[J].北京邮电大学学报,2006,29(z1):48-51 LüLiangbin,Cao Yang,Gao Xun,et al.Three dimensional localization schemes based on sphere intersections in wireless sensor network[J].Journal of Beijing University of Posts and Telecommunications,2006,29(z1):48-51(in Chinese)
[8]Bahl P,Padmanabban V N.Radar:an in-building RE-based user location and tracking system[C]//Proceeding of the IEEE INEOCOM,2000.New York:IEEE Computer and Communications Society,2000:775-784
(编辑:夏光)
Three-dimensional Localization Scheme for Spacecraft Indoor Environment Using ZigBee
LONG Yin GUO Pei XIA Yi ZHANG Lu YANG Jiaxin
(Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
To solving the problem of lack of an efficient three-dimensional localization scheme for spacecraft indoor environment,a three-dimensional localization scheme based on WSN(wireless sensor network)using ZigBee is proposed.The WSN deployed in the spacecraft is composed of reference nodes and unknown nodes,and the reference nodes'positions are known to help locating the unknown nodes.A three-dimensional coordinate is established by setting the plane where the reference nodes are placed as the plane XOY,and the Z coordinate is figured out by AOA(angle of arrival).The unknown node is projected on the plane XOY,and the X coordinate and Y coordinate on the plane XOY are computed by the trilateration localization strategy.Theoretically,only six reference nodes are required to locate all the unknown nodes three-dimensionally by using the proposed scheme.Meanwhile,synchronization of the network is not necessary,which reduces the complexity of the WSN.TDOA(time difference of arrival)is adopted to estimate AOA,and the angle estimation is also dependent on the hierarchical deployment of the reference nodes.Therefore,the complicated antenna arrays for AOA are not required.The simulation results show that the scheme proposed can locate accurately,makes less requirements for the hardware,network,computingand communication,and can be applied in the spacecraft indoor environment.
spacecraft indoor environment;three-dimensional localization;ZigBee;TDOA;AOA
TN911.7
A DOI:10.3969/j.issn.1673-8748.2015.03.007
2014-07-07;
2014-09-22
龙吟,男,工程师,从事航天器测控与通信分系统研究工作。Email:ly24381@163.com。
