基于机器视觉技术的水表新型检定方法
2015-10-25汤思孟赵杰煜陆晓峰
汤思孟,赵杰煜,陆晓峰
(1.宁波市计量测试研究院,浙江 宁波 315048;2.宁波大学信息科学与工程学院,浙江 宁波 315211)
基于机器视觉技术的水表新型检定方法
汤思孟1,赵杰煜2,陆晓峰1
(1.宁波市计量测试研究院,浙江宁波315048;2.宁波大学信息科学与工程学院,浙江宁波315211)
将机器视觉技术应用到水表检定系统中,通过固定在被检水表上方的高速高分辨率摄像机,动态获取运行中的水表图像,用颜色特征和背景高斯拟合建模结合的算法实现水表指针的准确定位,将图像实时转换成数字读数,并解决水珠、气泡等对读数干扰的问题,实现水表高效率全自动检定。
计量学;水表检定;颜色特征建模;高斯拟合算法;最小读数
1 引言
水表检定装置可进行水表示值误差等项目的检测[1~4]。有关仪表实时自动检测的研究多年以前就开始了[5~11]。但目前我国大量生产和使用的水表仍然以模拟机械式水表为主,因此采用非侵入性的实时水表自动化检测是提高检定效率的有效途径。光电脉冲法[12,13]和静态图像法[14~16]是目前最常见的2种检测方法。光电脉冲法实现了水表的自动检测,但存在对焦不便及检定过程容易掉失信号等弊病,可靠性和稳定性不是很好。静态图像法采用CCD摄像头获得检定前后水表的静态图像,计算机软件完成对静态图像的识别处理,获得水表示值,但静态图像识别误差一般在表盘最小分格值的1/3,即水表最小读数为0.033 L[17,18],检定用水量没有减少,检定时间与普通水表检定装置相同,且易受水珠、气泡等干扰因素影响。
本文将机器视觉技术应用于8个表位的水表检定系统中,采用一种基于动态视频图像处理和模式识别算法的水表快速自动检定技术,通过高速高分辨率摄像机读取水表示值,获取高分辨率动态视频图像数据,经高斯拟合建模算法精确地确定水表的指针位置,从而提高了水表的读数分辨率,并解决静态图像法中水珠和气泡遮挡读数指针时读不准的问题。
2 结构设计
摄像机连续拍摄水表指针动态视频图像,并以数据方式输入图像采集卡内,图像采集卡将图像进行比例缩放、裁剪,并以数据方式输入工控机内,工控机将数据经高斯拟合建模算法完成对水表指针的准确定位,同时,水流经换向器流入作为标准器的精密电子天平内,电子天平将采集到的标准水量数据输入工控机内,将水表示值与标准水量进行比较便得到水表示值误差。其中,摄像机、图像采集卡和工控机之间设有作数据传输连接的总线,精密电子天平与工控机之间也设有作数据传输连接的总线,工控机通过微控制器与电磁阀作电路控制连接。
整个系统主要由视频图像采集、通水阀门自动控制、电子天平数据采集、核心工控机4部分组成,具体结构见图1。

图1 水表自动检定系统结构图
3 硬件特点
3.1视频图像采集
动态视频图像采集到的数据量极大,因此,本方法采用了DH-VT142图像采集卡(PCI-E×1总线),该卡在全分辨率多路视频同时采集时,采集速度快,避免了因数据丢失而产生的拉道现象。为了不浪费总线的带宽,在通水排气阶段通过基于记忆的混合高斯背景建模算法完成水表指针的定位,通过DHVT142采集卡的硬件裁剪水表指针附近小块区域的图像,作为水表指针读取算法的数据输入。
3.2通水阀门自动控制
控制系统以ATMEGA16微控制器作为控制核心与工控机进行通信,通过ATMEGA16微控制器的IO端口接9012NPN型三极管的基极,再驱动相应的继电器之后直接接电磁阀,当工控机执行流量测试程序而需要打开总进水阀或者出水阀时,工控机发送相应的包含延时时间以及相应通道的数据到微控制器,微控制器接收到工控机发来的命令时首先解析数据,然后在ATMEGA16的IO口输出高电平或者低电平并保持工控机发送过来的延时时间,从而打开或者关闭相应的阀门。
3.3电子天平数据采集
标准水量数据采集使用电子天平,电子天平与工控机通过RS232进行串行通信,包括测量前后电子天平稳定数据的采集以及其它参数的采集,由于动态检定,由换向器引导水流进出电子天平,需解决电子天平数据的稳定问题。本方法利用梅特勒-托利多电子天平提供的标准串行通信指令与工控机进行通信或数据采集,为了获得稳定的标准水量数据,对电子天平的设置要求是数据在稳定后才能向工控机输出数据,确保标准水量的准确可靠。
3.4核心工控机
本方法采用的工控机控制整个水表检测工作,包括动态视频图像数据及电子秤的标准量值数据采集、确定指针精确位置的算法过程、阀门按序控制、各模块协调工作、以及人机对话、合格判别、报表打印等功能。
4 软件特点
4.1系统组成与要求
整个系统功能由多模块组成,包括含电子阀门的定时控制模块、系统的注册安全模块、摄像头检定算法模块、系统全局设置模块等等,其中,系统全局设置模块最为关键,内部有水表检定时间以及状态参数设置功能,方便操作人员的参数设置和控制,实现水表检定的自动化。
水表检定环境条件比较复杂,潮湿、光照、人影等因素都可能影响图像获取的准确性,光照、人影的变化会造成图像RGB值的剧烈变化,极大影响水表图像处理结果,潮湿的水汽会严重影响集成电路的运行稳定性,因此,要求确保照明充足,各种电路能持续稳定工作。
4.2图像识别及数据建模算法
在检定阶段,为了连续跟踪水表指针,以获得水表示值的准确数据,摄像机需实时传输大量的图像数据,若算法过于复杂的话,就不能实时完成任务,但算法过于简单又不能解决水珠、气泡等遮挡的问题。因此除了采用新型图像采集卡及新型总线外,设计一个有效合适的图像处理算法极其重要。
算法采用颜色特征和背景高斯拟合建模结合的算法实现水表指针的自动定位,以获得示值的准确值,主要通过图像采集卡裁剪水表指针附近小块区域的动态视频图像,将其作为水表指针读取算法的数据输入,根据指针和表盘不同形状及颜色的先验信息,并结合指针转圈运动特征,建立背景模型,再利用背景减除法得到指针准确的分度值。高斯拟合模型如下:

式中:x为多元随机变量向量,πi为混合系数,μi为水表中心点坐标,∑为方差,I为单位矩阵。由于多个水表指针运动半径相等,则∑只有一个值,根据指针图像多次累加实际就是一个对称圆,选择∑=],计算能量最小值:

由此得到水表中心坐标μ,半径长度σ,实现了指针的自动定位。在水表检定前的放水排气阶段,每秒读取10张初始动态视频图像、连续10 s共读取100张动态视频图像进行加权累加以得到初始图像。在系统的流量测试阶段,通过背景减除得到图像运动区域,再利用图像颜色特征及其轮廓特征,确定每个指针的准确位置。当指针运动到水珠、气泡遮挡的区域,利用水珠、气泡等遮挡之外的有用信息和指针运动的连续性特征,确定指针运动方位,并且在指针每圈运动结束时自动记录一次结果,防止误差传递到下一次,这样就排除了光照、水珠和气泡等的影响,保证水表读数的准确性。
5 实验与讨论
本方法研究是确保在同样的检测精度下,大幅度减少检测时间,这可通过减少用水量来实现。按国家检定规程要求,为了确保水表的读数误差在允许范围内,水表的检定用水量不能少于最小检定分格值的200倍,普通机械水表的最小分格值为0.05 L,因此传统检测水表的用水量不小于10 L。水表的出厂检定必须在常用流量(2.5 m3/ h)、分界流量(0.05 m3/h)及最小流量(0.031 25 m3/h)3个流量点进行检定,其中后2个流量点用水量均为10 L,流量值较小,检定时间最长,约占整个检定时间的93%,通过减少这2个流量点的检定时间对提高效率最为有效,本方法采用高速高清摄像机、颜色特征建模和背景高斯拟合结合的算法实现水表指针准确定位,最小读数可降低到0.000 46 L,用水量可减少到1 L以下,为了消除指针运转影响,选择的用水量为1 L。图2是系统工作流程图。

图2 系统工作流程图
本方法获得的水表数据可靠性还需通过实验来验证。通常为了检验某种检测方法的准确性和有效性,将该仪表用其他检测方法进行比较是常见的办法,但由于普通机械式水表的重复性不好,即使在同一测试条件下对同一水表但不是同一次的测试,也会存在较大的重复性误差,从而失去比较的意义。为了确认本方法指针数据的可靠性,在系统软件中设置了获得数据的同时,保留检定前后瞬间指针图像,用人眼识别的方法确定水表的示值,将二种方法获得的数据进行比较。表1为8个口径为15 mm旋翼式水表的在3个流量点上人工静态图像和本方法检测数据对照表。
由表1可见,二种方法获得的数据略有差异,但非常接近,必须指出,人工读数的末位数据是估读得到,存在较大的误差,表盘的分度也存在一定的误差,而本方法得到的数据经系统准确定位得到,分辨率很高。表2为二种方法的最小读数、用水量及检定时间对照表,最小读数与流量的大小、摄像机的采集速度有关,本方法摄像机的采集速度为30帧/s。经计算,本方法的全部检定时间约为传统人工检测时间的16%。
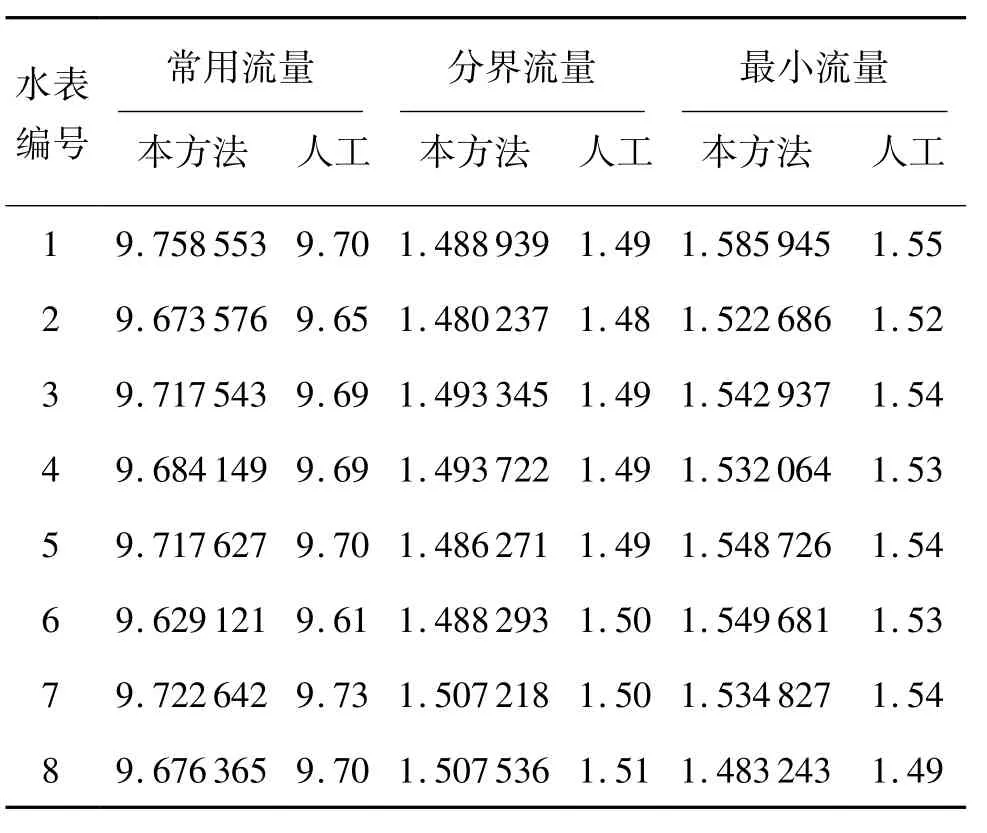
表1 2种方法获得的水表示值对照表L

表2 2种方法检定时间对照表
6 结论与展望
本检定方法是通过用高精度高速摄像机代替传统的人眼连续获取水表图像数据,经过基于动态视频图像处理和模式识别算法,获得比人眼分辨率高数倍的水表示值,从而大大减少检定时间,实现检定过程的自动化,经测算,若考虑水表的安装、拆卸及密封性试验时间,整个水表检定过程可提高效率达3倍多。光照、人影等环境因素对水表图像识别的准确性带来较大的影响,严重的光照、人影变化会造成图像RGB值的剧烈变化,极大影响水表图像处理结果,因此,如何消除这些影响,优化模式识别算法将是今后需进一步研究的课题。
[1]詹志杰.水表技术手册[M].北京:中国计量出版社,2004.
[2]国家质量监督检验检疫总局.JJG162—2009冷水水表[S].2009.
[3]赵蕾荣.水表检定中的数据处理[J].计量技术,2012,(10):72-74.
[4]张祖明.微机控制水表检定装置:中国,200420114413.4[P].2006-03-29.
[5]Sablatnig R.Visual inspection of water meters used for automatic calibration[J].Image Analysis Applications and ComputerGraphics(LectureNotesinComputer Science),1995,1024:518-519.
[6]Sablatnig R.Flexible automatic visual inspection based on the separation of detection and analysis[J].Proc IEEE Int Conf Pattern Recognit,1996:944-948.
[7]Antoniadis I,Hountras A,Glossitis G.Using LabVIEW and PXI for online mechanical parameter monitoring system for a diesel generator unit set[R].Dept Mech Eng,National Technical Univ,Athens,Greece,Tech Rep 2002_530_821_123_8.5x10.875.qxd,2002.
[8]Lan J H,Wei X,Bai Z L.Automatic calibration system for analog instruments based on DSP and CCD sensor[J].Proc SPIE,2008,7156:71560Q-1-71560Q-10.
[9]Liu S G,Liu M Y,He Y.Checking on the quality of gauge panel based on wavelet analysis[C]//2002 International ConferenceonMachineLearningandCybernetics,Beijing,China,2002,2:763-767.
[10]Dyer C R.Gauge inspection using Hough transforms pattern analysis and machine intelligence[J].IEEE Trans Pattern Anal Mach Intell,1983,5(6):621-623.
[11]Jaffery Z,Dubey A.Architecture of Non-Invasive Real Time Visual Monitoring System for Dial Type Measuring Instrument[J].IEEE Sensors Journal,2013,13(4):1236-1244.
[12]潘丰.水表特性自动校验系统设计[J].传感器技术,2003,22(10):24-29.
[13]苑玮琦,于聪颖.水表号码读取系统的设计与实现[J].电子技术应用,2007,(4):74-75.
[14]周志峰,丁维光.基于图像识别的二表位全自动复式水表检定装置的研发[J].中国计量,2013,(5):86-87.
[15]王三武,戴亚文.多指针水表自动识别系统[J].仪器仪表学报,2005,26(11):1178-1180.
[16]程琦,赵军,刘宇.指针式仪表示值识别系统研究[J].计量学报,2009,30(5):192-195.
[17]周小雨.水表自动检定装置:中国,200720082206.9 [P].2008-09-24.
[18]孙军,马俊杰,玄惠萍,等.普通水表自动检定装置及其检定方法:中国,03114302.4[P].2004-10-27.
A Novel Water Meter Calibration Method Based on Machine Vision Technology
TANG Si-meng1,ZHAO Jie-yu2,LU Xiao-feng1
(1.Ningbo Institute of Measurement and Testing,Ningbo,Zhejiang 315048,China;2.The College of Information Science and Engineering,Ningbo University,Ningbo,Zhejiang 315211,China)
The machine vision technology applied to the water meter calibration is discribed.Several high speed and high resolution cameras are installed at the top of the checked meter to dynamically access the running water meter image.The meter pointer is accurately positioned using color feature modeling and background Gaussian fitting methods.Machine vision approaches are used to convert the captured images into digital readouts.Encountered problems such as blurred surface and air bubble interfere are overcome.The developed system realizes high efficient automatic water meter verification.
Metrology;Water meter calibration;Color feature modeling;Gaussian fitting methods;Minimum readout
TB937
A
1000-1158(2015)01-0054-04
10.3969/j.issn.1000-1158.2015.01.12
2013-09-04;
2014-01-07
汤思孟(1959-),男,渐江宁波人,宁波市计量测试研究院高级工程师,硕士,主要从事流量计量检测工作。tsm0716@163.com
