无刷双馈电机瞬态性能分析
2015-10-22曾斌曾进辉
曾斌 曾进辉
【摘 要】无刷双馈电机已在风电等行业得到广泛应用,分析其瞬态性能十分必要。为了分析笼型转子无刷双馈电机在单馈异步运行、双馈同步运行、双馈亚同步运行和双馈超同步运行四种运行模式下的瞬态特性,建立无刷双馈电机在转子d-q旋转坐标系下的瞬态数学模型;用Matlab构建系统仿真模型,通过实例对无刷双馈电机在单馈异步运行、同步运行、双馈亚同步运行和双馈超同步运行四种运行模式的瞬态性能进行仿真分析。通过实例对无刷双馈电机单馈运行和双馈运行进行了仿真,仿真结果与理论分析一致。
【关键词】无刷双馈电机;数学模型;仿真模型;运行模式
【Abstract】Build brushless doubly-fed motor rotor in the d - q rotating coordinate system under transient mathematical model; Matlab system simulation model was constructed, an example of brushless doubly-fed motor run in a single feed asynchronous, synchronous operation, doubly-fed synchronous operation and doubly-fed synchronous running the transient performance of the four kinds of operating mode simulation analysis, the simulation results are in conformity with theoretical analysis.
【Key words】Brushless doubly-fed machine; Mathematical model; Simulation model; Operating mode
0 引言
无刷双馈电机(BDFM)是近年来发展起来的一种新型电机,该电机有两套定子绕组,一套转子绕组,两套定子绕组分别称为功率绕组)和控制绕组。无刷双馈电机基本原理是经过特殊设计的转子使得两套定子绕组产生不同极对数的旋转磁场间接相互作用,并能对其相互作用进行控制来实现能量传递。BDFM可以运行异步也可以同步运行,既可作为交流调速电动机,又可作为变速恒频发电机使用,可以在无刷的情况下实现双馈运行。目前,无刷双馈电机主要用于驱动中、大容量的风机、水泵类负载的调速系统和变速恒频发电系统中。
无刷双馈电机的转子结构 主要有磁阻型、笼型和绕线型三种种类型。笼型转子无刷双馈电机的定子和转子进行了特殊设计使得两套定子绕组产生的空间磁场只能通过转子间接耦合进行能量的传递和转换。无刷双馈电机当功率绕组、控制绕组的极数和控制绕组的频率一定时,改变控制绕组的供电频率可以调节电机转速,使电机处于不同的运行状态[1-4]。
本文为了分析笼型转子无刷双馈电机在单馈异步运行、双馈同步运行、双馈亚同步运行和双馈超同步运行四种运行模式下的瞬态特性,建立了无刷双馈电机在转子速dq坐标系中的瞬态数学模型,根据所建立的数学模型构造了Matlab/simulink仿真模型,通过实例对无刷双馈电机的瞬态性能进行仿真分析。
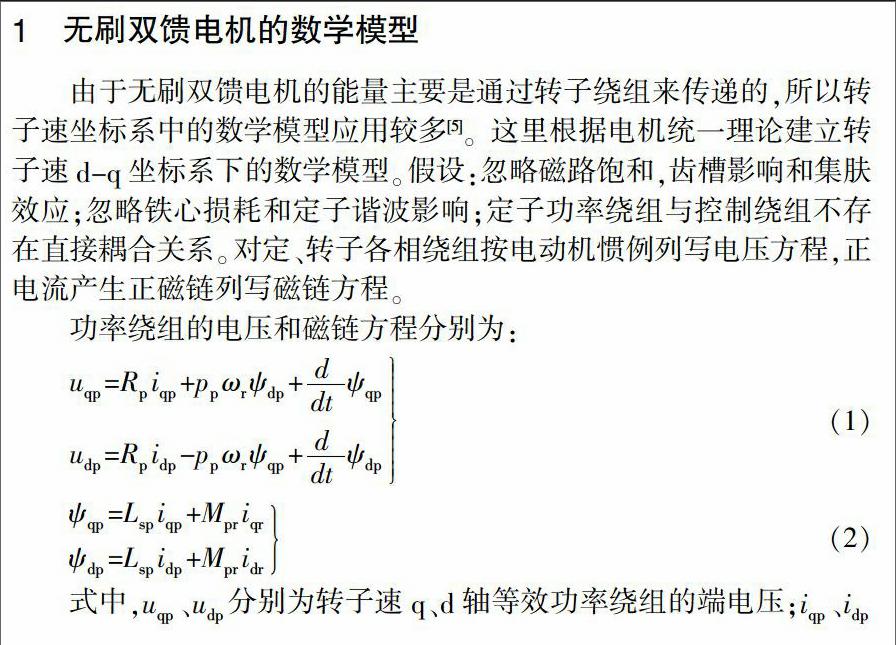
1 无刷双馈电机的数学模型
由于无刷双馈电机的能量主要是通过转子绕组来传递的,所以转子速坐标系中的数学模型应用较多[5]。这里根据电机统一理论建立转子速d-q坐标系下的数学模型。假设:忽略磁路饱和,齿槽影响和集肤效应;忽略铁心损耗和定子谐波影响;定子功率绕组与控制绕组不存在直接耦合关系。对定、转子各相绕组按电动机惯例列写电压方程,正电流产生正磁链列写磁链方程。
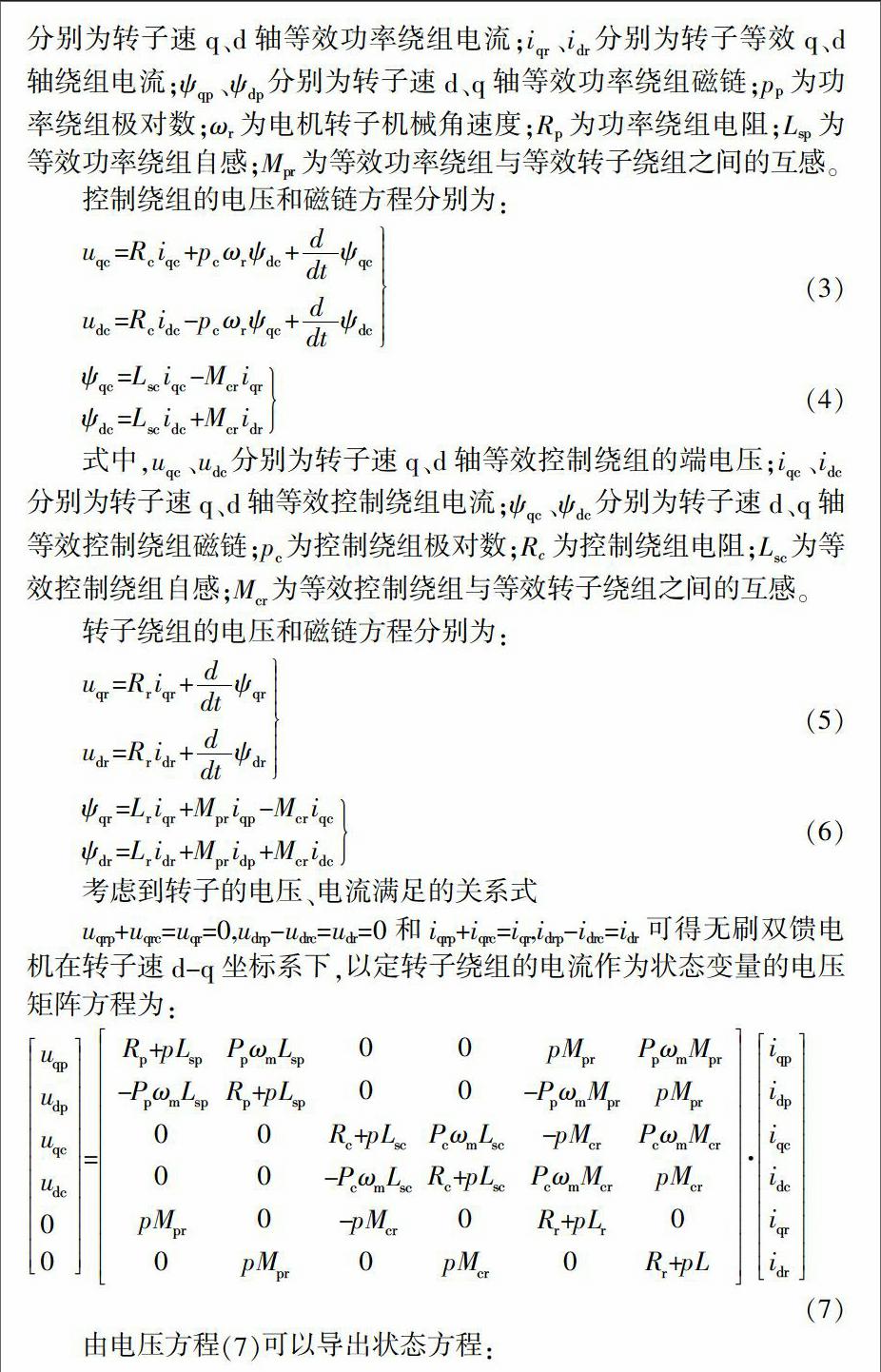
式中,当功率绕组电源和控制绕组电源相序相同时取“+”号,反之取“-”。当fc=0时的转速称为自然同步速。fc前取正号的调速,电机转速大于自然同步速,称为超同步调速;fc前取负号的调速,电机转速小于自然同步速,称为亚同步调速。
2 仿真模型建模
根据转子速dq坐标系中无刷双馈电机数学模型:方程(8)~(10),用Matlab/Simulink建立的仿真模型如图1所示。其中常数模块中的电感矩阵对应于方程式(8)的电感矩阵,Matla function 模块中表示方程式(9)的阻抗矩阵,子系统2是根据方程式(9)构造的电磁转矩计算模块,子系统3是根据方程式(10)的转矩平衡方程构造的模块。如果需要得到功率绕组、控制绕组的三相电压和电流以及转子绕组的等效三相电流,还需要利用坐标变换关系式构造仿真模型。
3 实例仿真分析
采用图1所示的仿真模型对无刷双馈电机进行瞬态仿真分析。仿真用的电机参数见表1[5],定子两套绕组均为Y连接。
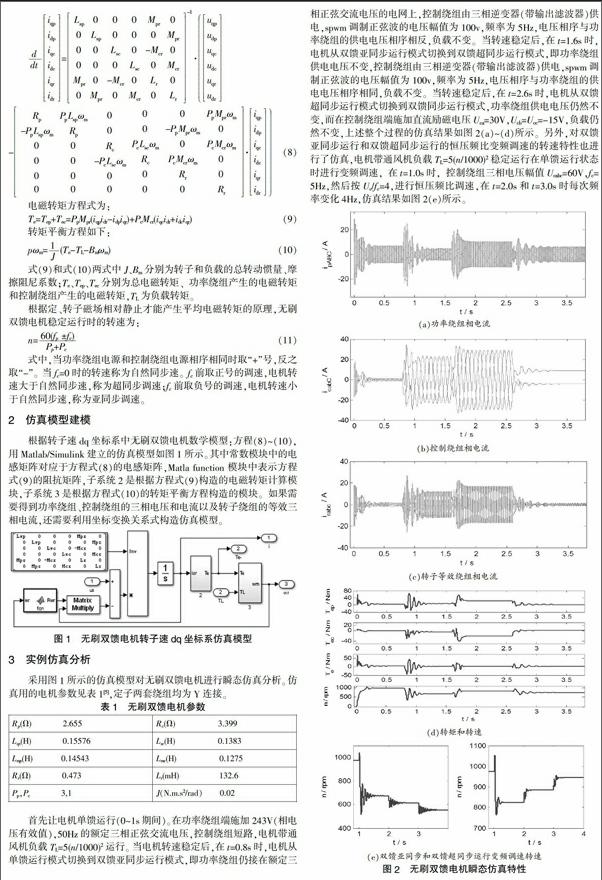
首先让电机单馈运行(0~1s期间)。在功率绕组端施加243V(相电压有效值),50Hz的额定三相正弦交流电压,控制绕组短路,电机带通风机负载TL=5(n/1000)2运行。当电机转速稳定后,在t=0.8s时,电机从单馈运行模式切换到双馈亚同步运行模式,即功率绕组仍接在额定三相正弦交流电压的电网上,控制绕组由三相逆变器(带输出滤波器)供电,spwm调制正弦波的电压幅值为100v,频率为5Hz,电压相序与功率绕组的供电电压相序相反,负载不变。当转速稳定后,在t=1.6s时,电机从双馈亚同步运行模式切换到双馈超同步运行模式,即功率绕组供电电压不变,控制绕组由三相逆变器(带输出滤波器)供电,spwm调制正弦波的电压幅值为100v,频率为5Hz,电压相序与功率绕组的供电电压相序相同,负载不变。当转速稳定后,在t=2.6s时,电机从双馈超同步运行模式切换到双馈同步运行模式,功率绕组供电电压仍然不变,而在控制绕组端施加直流励磁电压Uca=30V,Ucb=Ucc=-15V,负载仍然不变,上述整个过程的仿真结果如图2(a)~(d)所示。另外,对双馈亚同步运行和双馈超同步运行的恒压频比变频调速的转速特性也进行了仿真,电机带通风机负载TL=5(n/1000)2稳定运行在单馈运行状态时进行变频调速,在t=1.0s时,控制绕组三相电压幅值Ucabc=60V,fc=5Hz,然后按Uc/fc=4,进行恒压频比调速,在t=2.0s和t=3.0s时每次频率变化4Hz,仿真结果如图2(e)所示。
(a)功率绕组相电流
(b)控制绕组相电流
(c)转子等效绕组相电流
(d)转矩和转速
(e)双馈亚同步和双馈超同步运行变频调速转速
从仿真结果看,电机单馈运行,转速稳定后的功率绕组的电流波形为正弦波;由于转子等效绕组与控制绕组的磁耦合作用,短路的控制绕组中有感应电流流过,转速稳定后,控制绕组的电流为正弦波,数值较小;定子功率绕组和控制绕组中的电流分别与转子电流相互作用分别产生电磁转矩,转速稳定时,功率绕组电流与转子绕组电流产生的电磁转矩(Tep)约为4.81N.m,控制绕组电流与转子绕组电流产生的电磁转矩(Tec)约为-0.06N.m,总的合成电磁转矩(Te)为4.75N.m;稳定转速为974rpm。电机从单馈运行切换至双馈亚同步运行模式时,定、转子电流均有较大波动,电磁转矩由较大波动,转速也有较大波动,经过一段时间振荡后,定、转子电流、电磁转矩和转速都趋于稳定,稳定后的功率绕组电流有所减小,而控制绕组和转子绕组的电流则大幅增加,Tep=7.52N.m,Tec=-5.2N.m,Te=2.32N.m,转速为675rpm,电机在亚同步速上运行。电机从双馈亚同步运行模式切换至时双馈超同步运行模式时,电机的电磁量和机械量经过短暂的振荡趋于稳定,稳定后的定、转子电流均比双馈亚同步运行时大,Tep=24N.m,Tec=-20.56N.m,Te=3.44N.m,转速为825rpm,电机在超同步速上运行。电机从双馈超同步运行模式切换至时双馈同步运行模式时,转矩和转速经过短暂振荡后,电机进入稳定状态,此时功率绕组电流有所减小,控制绕组电流电流为直流,等效转子电流为正弦波,数值大幅减小,比单馈运行时还小,Tep=2.15N.m,Tec=0.629N.m,Te=2.78N.m,转速为750rpm,电机在自然同步速上运行。双馈模式变频调速时,每次频率变化4Hz,转速变化60rpm,完全满足式(11)中频率与转速的关系。仿真结果与理论分析相符。
4 结论
本文根据电机统一理论建立了无刷双馈电机在转子速dq坐标系中的数学模型,应用Matlab/Simulink软件构建了对应的仿真模型,通过实例对定子功率绕组和控制绕组均为Y形接法的无刷双馈电机带有通风机负载时,在单馈异步运行、双馈亚同步运行、双馈超同步运行和同步运行四种运行模式的瞬态性能进行仿真分析,获得以下结论:无刷双馈电机单馈运行时,其转矩和转速特性与传统感应电动机相一致,具有相同的自起动能力;无刷双馈电机双馈运行时,在一定的负载范围内,电机的稳定转速严格满足式(11),只与控制绕组的电源频率有关,与负载的大小无关;无刷双馈电机双馈运行时,控制绕组所需能量只占相同总能量的一小部分,可以有效降低变频器的容量。所做的仿真结果与理论分析相符。
【参考文献】
[1]Z. S. Du, T. A. Lipo. Dynamics and Vector Control of Wound-Rotor Brushless Doubly Fed Induction Machines.University of Wisconsin-Madison College of Engineering,Wisconsin Power Electronics Research Center[J].Research Report 2014-39:1-8.
[2]E.M.Schulz , R.E.Betz.Optimal torque per amp for brushless doubly fed reluctance machines[Z]. Proc. of IEEE IAS Annual Meeting, vol.3,2005: 1749-1753.
[3]邓先明,姜建国.无刷双馈电机的工作原理及电磁设计[J].中国电机工程学报,2003,23(11):126-132.
[4]邓先明,姜建国.无刷双馈电机的电磁分析和等效电路[J].电工技术学报,2005(9):19-23.
[5]Yunguo Zhu, Xing Zhang, Shengyong Liu. Study on Speed Sensorless Vector Control of Brushless Doubly-Fed Machine[J]. Consumer Electronics, Communications and Networks (CECNet), 2011 International Conference on,2011:780-783.
[责任编辑:汤静]
