航空模型与真机操纵的区别与联系(2)
2015-10-21李俊
李俊


上一节结合有人驾驶飞机的配平开关,介绍了遥控设备的微调功能及其用法。无论对入门级设别还是中高级设备,都具有在飞行中的微调功能,无非是机械式和数字式、内置和外置的区别罢了。从本节开始,将为大家介绍中高级遥控设备才具备的功能。在这些设备(至少有6个通道,并具备电脑预编程功能)的使用说明书中,第一个功能通常都是Dual Rate & Exponential,即双比率和曲线设置。
二、双比率开关
与力臂调节器
模型飞机的4个基本操纵通道分别是升降舵、副翼、方向舵和发动机油门,其中前3个是用于控制3个基本操纵舵面的。中高级遥控设备都有这3个基本操纵舵面的专属双比率开关,也称为大小舵量开关,或简称D/R开关。如升降舵的双比率开关,其附近的面板上会标注“ELE D/R”字样;而副翼与方向舵的标注分别是“AILE D/R”和“RUD D/R”(图10)。该功能根据飞行需要,将各操纵舵面的转动范围设置出2个或3个档位,各档舵面偏转的极限范围不同。如果是两段式开关,可设置大、小两个偏转范围;如果是三段式开关,则可设置大、中、小三个偏转范围,即三比率开关(严格来说,不能再称为Dual Rate,而是Triple Rate了)。
现代航空模型早已不仅仅局限于一般意义上的飞行及特技动作,在模型的速度、机动性等均大大改善的前提下,3D、4D等令人眼花缭乱、叹为观止的花式特技飞行动作层出不穷。这就要求操纵者具备高超的技艺,能够利用遥控设备上两根短小的操纵杆进行精细、迅速、准确的操纵动作。同时,这也对遥控设备提出了很多新要求。
模型进行常规飞行时,速度有快有慢。若飞行速度较高,操纵舵面的效率会很高,模型对操纵的反应非常灵敏,要操纵其完成一个动作,只需舵面产生较小的偏转量即可;若飞行速度较慢,操纵反应就会比较迟钝,舵面要产生较大的偏转量才能使模型完成相似的动作。目前大家所用的遥控设备均为比例式,想要舵面偏转多大角度,操纵杆就必须做出相应的动作量,二者一一对应。
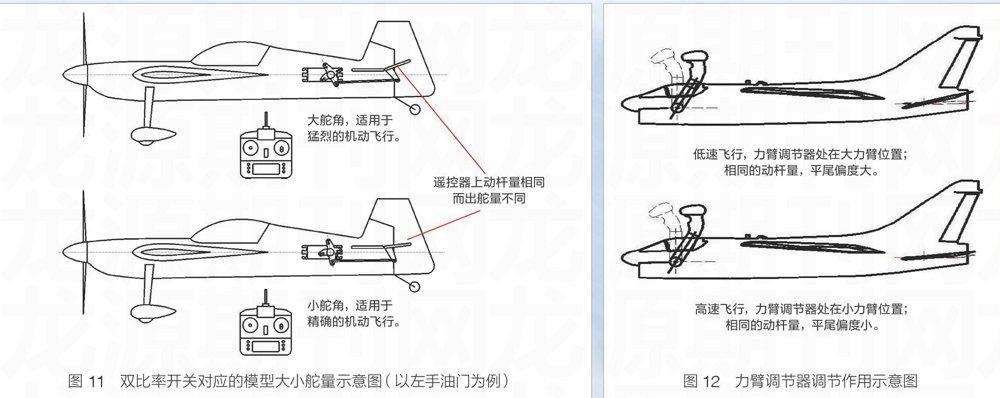
遥控设备的操纵杆一般都比较短小。由于一些入门级设备操纵杆动作量与舵面偏转量的对应比例是固定的,因此要通过短小的操纵杆完成精细操纵很不容易。于是工程师们设想,能否设计一个可改变舵面偏转量与操纵杆间对应比例关系的开关,使遥控设备具备可变传动比功能。这样一来,在高速飞行时,虽然模型舵面的偏转量较小,但可通过切换开关使操纵杆上的动作量保持在正常范围内,不至于那么“精细”;而在低速飞行时,要求舵面的偏转量较大,切换开关后又能使操纵杆上的动作量不至于过大而超过手指活动的范围。这种操纵者可根据模型飞行速度自行完成转换的开关,就是双比率开关(图11)。不同品牌型号的遥控设备各有特点,其双比率开关设置方法可参考使用说明书。
那么,在有人驾驶飞机上是否也有类似的设备呢?答案是肯定的,而且有人驾驶飞机上的设备还是全自动、无级调节的。该设备被称为力臂调节器。以现代战斗机为例,其飞行速度范围覆盖200千米/小时到2 000千米/小时。这个速度包线范围比模型大多了,甚至超过了声速(这么高的速度会产生很多特殊现象)。但作为飞行器,有人驾驶飞机与模型飞机都有一个共同点,即高速飞行时舵面很灵,而低速飞行时舵面会变得相对迟钝。
第二次世界大战之前的飛机,最高飞行速度一般在600千米/小时左右,其操纵问题并不突出,高低速飞行的操纵差异不是特别显著。二战后出现了喷气式飞机,航空进入了超声速时代,情况就大不一样了。对于只有简单操纵系统的飞机,其在高速飞行时,如果飞行员不经意动了驾驶杆,操纵舵面产生较大偏转后,飞机会立即做出反应,可能会令座舱内的飞行员撞到硬邦邦的座舱盖。若此时没有头盔防护,飞行员极易受伤,严重时还会发生昏厥,后果不堪设想。另外,飞机机体结构在高速条件下也难以承受这么大的飞行过载,可能会发生空中解体。因此,飞机在高速飞行时,飞行员们希望正常的驾驶杆动作量产生的舵面偏转量小一些,使飞机的反应不要过于灵敏;而在低速飞行时,飞机操纵反应迟钝,飞行员们又希望能以正常的驾驶杆动作量,产生足够的舵面偏转量,以实现对飞机的有效操纵。用飞行品质专业术语来说,即希望“每g驾驶杆力”相同(此处“g”表示过载)。它是舵面效应的同义词,即无论飞机的速度高或低,完成同样的机动动作对驾驶杆施加的力(即动杆量或杆位移量)都一样,从而驾驶感受也基本一致。这就是可变传动比的概念,它成为飞机设计师们的目标。
采用机械操纵系统的飞机,是通过力臂调节器来实现可变传动比功能的。衡量飞机速度高低有一个基本指标——动压或速压,是当地的空气密度与飞行空速平方乘积的一半,一般用Q表示。飞机上的空速管是测量动压的装置,其测量信息一路传到空速表,另一路传递给力臂调节器的动压感受装置(西方称为Q盒或Q box)。感受到不同的动压后,Q盒就对力臂调节器实施自动调节,让飞行员的驾驶感受更好,使飞行更安全、动作更准确、操纵更有效。动压较大时,如低空大表速或高空高速飞行时,操纵杆到舵面的传动比较小;动压较小时,如低空低速或高空低速时,操纵杆到舵面的传动比就大些,保证有效的操纵(图12)。当然,力臂调节器除了自动模式外,也有手动模式。当Q盒或力臂调节器发生故障时,飞行员可用手动模式根据飞行速度自行选择大力臂或小力臂。这时则与模型遥控设备的使用方法完全一致。
2012年11月25日,歼15舰载机在我国首艘航母“辽宁”舰上成功着舰和起飞的一幕笔者至今仍历历在目。仔细观看歼15着舰前的姿态和动作细节,可以看到飞机在进近着舰过程中,差动平尾始终在左右偏转,动作很明显、偏转量很大。但飞行员不可能大幅度操纵驾驶杆而将驾驶杆的行程全部用尽。显然,此时驾驶杆到舵面的传动比很大,才保证了着舰过程的有效操纵。而当飞机在低空大速度通场时,舵面的偏转却不能那么大,必须很微小。且不说歼15这种先进的电传操纵飞机,即使是使用老式机械操纵系统的战斗机(如米格-21),也必须有这种传动比调节装置。机械式操纵系统的力臂调节器体积较大、机构复杂,一般只设置在与过载联系最直接的升降舵/全动平尾的操纵路径上。而电传操纵飞机实现可变传动比功能比较容易,只要把空速、高度和马赫数等数据输入飞行控制计算机,飞控软件即可调整舵机的偏转量,西方航空界将这种方法称为“大气数据增益调参”。电传操纵飞机还可以方便地实现飞机三个轴的“可变传动比”。如现代战斗机在带外挂物时,绕三个机体轴的转动惯量很大,飞机比较笨重。而飞行员如果拨动一个“带外挂/干净构型”的开关,飞控计算机就会调整驾驶杆到舵面的传动比,使飞行员的驾驶感受基本相同,飞机的灵敏度不会因是否带外挂物而变化。法国的“幻影”2000战斗机就具备这个功能。
就可变传动比问题,还有一点要特别说明:模型飞机的速度变化范围小,通常特技飞行时用大舵量,增强特技动作的惊险效果;一般飞行时用小舵量,保证动作的精准度和美感。而且模型上没有驾驶员,不用考虑人对过载的承受能力和乘坐的舒适性,动作“粗猛”一些也没关系。而真实的有人驾驶飞机,尤其是战斗机,都会在高速飞行时自动变换为小舵量,低速飞行时自动切换为大舵量,保证飞行员在高低速、不同飞机重量条件下驾驶感受的一致性。可见,同样是可变传动比设置,模型飞机和有人驾驶飞机对其使用方向有时是相反的。
此外,通过调整驾驶感受来提高安全性和操纵性,不仅在飞机上有,汽车上也有诸多应用。现在的汽车大多装备了行车电脑和助力系统。行车电脑中加载有行车控制软件,体现了制造商对驾驶操纵性能的理解及相关行驶控制律的设置。在行车速度较低时,助力器会使方向盘变得轻巧,操纵起来容易且省力;而当行车速度较高时,助力器会让方向盘变得很沉重,驾驶员不易改变汽车行驶方向,以保证高速行驶的安全。汽车界的工程师们称之为随速助力系统。这也是一种速度增益调参方法,其设计思想与航空界的大小力臂有异曲同工之妙。
三、曲线设置与
非线性机构
与双比率开关设置相关的另一个重要功能是曲线设置,即Exponential Setting,或称为指数曲线设置。为什么有这项设置呢?从事飞行事业的人大都知道一个常识:在一定的动压下,飞机的舵面在小范围内偏转时效率最高,通常当舵面在其中立位置附近±10°范围内活动时能获得最高的舵面效率。而在舵面发生较大的偏转时,流经舵面的气流会发生严重分离,效率出现非线性变化,而且往往较低,导致飞机的操纵反应迟钝。这就意味着,舵面效率与舵面的偏转角度并非线性关系。
在入门级遥控设备上,操纵杆偏转的角度与模型上舵机的偏转角度是对应的,这是真正的“全比例、纯线性”遥控。不过操纵动作虽然是线性的,但其最终的操纵效果却并不线性。这对一般的飞行影响不大,但对比赛的影响却很大。在比赛中,对模型飞行动作的质量要求很高,选手们要在中立点附近做频繁的微小修正。如果使用纯线性遥控器操纵,模型在中立点附近的反应会过于灵敏,要求选手的操纵动作必须非常精准、细腻,否则模型就会左右晃、上下摆,将严重影响动作质量和成绩。因此,操纵手们都希望能在遥控设备上增加一种功能,降低中立点附近的操纵灵敏度,使模型“迟钝”一些;而在远离中立点时,大舵量偏转的动作幅度又要大一些,以补偿舵面效率降低的影响,提高操纵灵敏度。由于舵面的效率很难改变,于是工程师们又将目光集中在遥控设备上,希望通过改变传动比实现这一功能。
与上一节介绍的双比率开关类似,以其为基础,改变在同一舵面偏转总量下的传动比就是下面要介绍的曲线设置,其原理如图13所示。该曲线图以操纵杆输入为自变量。舵机偏转输出为因变量。为减小中立点附近的操纵灵敏度,可将操纵杆对应的舵机偏转输出斜率變小;为增大远离中立点的大动作量时的操纵灵敏度,则将操纵杆对应的舵机偏转输出斜率增大。这样,通过曲线设置就实现了操纵效果的线性化。一般不会往相反的方向设置(图14),事实证明,降低中立点附近灵敏度的曲线设置,对提高特技动作的质量非常有帮助。
飞机在地面进行静态测试时,各舵面的偏转角范围可达±20°,但在正常飞行时,舵面活动范围一般不超过±10°,即使是机动灵活的战斗机也是如此。因此,在现代有人驾驶飞机上,无论采用电传操纵系统还是机械操纵系统,都有这种曲线设置功能,也称为非线性机构。它是一种改变驾驶杆到舵面偏转量间传动比的机构,其目的是将舵面中立位置附近的操纵灵敏度减小,并适当增大远离中立点处大舵量的操纵灵敏度。如英国原霍克·西德利公司在20世纪70年代研制的“鹰”式高级教练机,是一种典型的采用机械式操纵系统的飞机。从其操纵系统示意图可见,在全动平尾操纵线路中设有非线性机构,可大大改善其操纵性。“鹰”式教练机出现不久,即在1979年被选为大名鼎鼎的英国“红箭”飞行表演队座驾,并一直使用至今。其入选原因正是优秀的操纵性能和飞行性能。再如苏联的米格-21超声速战斗机,其副翼和方向舵的操纵也都设有非线性机构,就是为了防止飞机在大表速飞行时操纵过于灵敏。
对于采用机械式操纵系统的有人驾驶飞机,其非线性机构比较复杂,一般有四杆、六杆和连杆齿轮式非线性机构3种,其具体原理不在此赘述,感兴趣的读者可自行查阅相关资料。采用电传式操纵系统的有人驾驶飞机,其非线性设置则很容易在飞行控制律和飞控软件中实现,大大降低了系统布置的难度,提高了飞机的操纵性。
那么为什么要采用指数曲线而不采用其它类型的曲线呢?这是因为在曲线拟合中,指数拟合最方便、使用最广泛、运算量也最少。
有人驾驶飞机与模型飞机还有一个显著的区别。前者飞行员的操纵杆较长,是“杆大手小”,飞行员的操纵容易做到相对准确,即使在中立点附近晃动操纵杆也不至于使飞机产生很大反应。而模型飞机遥控器上的操纵杆较短,是“杆小手大”,动作稍微大点,就可能导致模型出现很大的反应。有人驾驶飞机尚且要用非线性机构改善飞机的操纵性能,模型飞行时更要设置好曲线,避免其在中立点附近动作过于灵敏。
此外,西方模型爱好者一般都喜欢把遥控器的操纵杆调得很长,也是为了实现调整精细、操纵准确的目的(图15)。而且他们还习惯于采用双指捏杆的方式,即用大拇指和食指同时捏住操纵杆实施操纵(图16)。这种方式下,在操纵动作的反方向,总有另一个手指作为限制,对操纵动作有一定的缓冲,形成类似阻尼的作用。将操纵杆调得很长,采用双指捏杆的方式,再加上大小舵量和线性曲线设置的效果,使西方的模型爱好者的操控准确度很高(图17)。而亚洲的模型爱好者所用的遥控设备操纵杆相对短小,他们习惯用大拇指压杆的操纵方式,动作比较剧烈,但准确度较差(图18)。为此,笔者推荐使用双指捏杆的操纵方式(图19)。(未完待续)
