干涉图像的数字化处理算法研究
2015-10-20李晋惠范博洋西安工业大学理学院陕西西安7002西安工业大学北方信息工程学院陕西西安70025西北工业大学自动化学院陕西西安70072
王 飞,李晋惠,范博洋(.西安工业大学 理学院,陕西 西安 7002;2.西安工业大学 北方信息工程学院,陕西 西安 70025;.西北工业大学 自动化学院,陕西 西安 70072)
干涉图像的数字化处理算法研究
王飞1,2,李晋惠1,范博洋3
(1.西安工业大学理学院,陕西西安710021;2.西安工业大学北方信息工程学院,陕西西安710025;3.西北工业大学自动化学院,陕西西安710072)
用Zygo干涉仪采集到的干涉条纹图像经过图像增强、图像二值化、图像细化、图像骨架修复、条纹级次标定、数据采集等处理,可以得到在干涉检测中用于波面分析的数据集,围绕一幅用于判定光学平面面形的干涉图的处理过程进行了研究。
干涉图像;图像增强;条纹级次;数据采集
0 引言
光学测量中,干涉测量仍然是一种常用的重要方法。干涉测量是通过对干涉图像的判读来评定光学试样的质量的。而干涉测量的结果是一幅干涉条纹图,可以实时观测,也可以存储成为干涉图。对干涉图的判读,传统做法是按照美国材料与试验协会(American Society for Testing and Materials,ASTM)的标准,人工利用一把尺子和一支铅笔测量[1],这种方法虽然简单,但已经不能满足精确测量的需要。利用数字化图像处理技术,借助于图像处理软件MATLAB,按照设计的算法对采集到的干涉图像进行图像增强、二值化、图像细化、骨架修复、采样等过程的处理,目的就是为分析处理而复原出波面数据。
1 干涉图像采集
使用美国Zygo公司制造的激光波面干涉仪(型号:VeriFire PE)作为实验仪器。将被测件的被测表面清洁后,放在标准平面下的承物台上。通过调节承物台方位使两表面反射光斑像重合,通过CCD可以采集到等厚干涉条纹。利用Zygo干涉仪采集到的干涉条纹如图1所示。
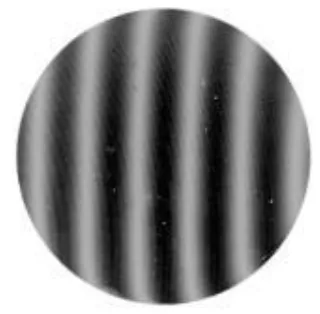
图1 干涉条纹图
2 干涉条纹的数字图像处理过程
结合干涉图像的特点以及干涉条纹判读要求,其中心思想就是确定每一条干涉条纹的中心位置极其对应的干涉级次,提取干涉图上每一条干涉条纹的具体信息,因此干涉图像的处理主要步骤包括:干涉图像的预处理、干涉图像的二值化、干涉条纹细化、骨架修复、干涉级次标定、数据采样等[2]。处理流程图如图2所示。
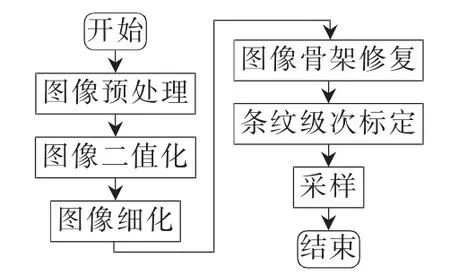
图2 干涉条纹数字图像处理流程图
3 处理算法及实现
3.1干涉图像预处理
在采集干涉图的过程中,由于仪器本身或外界影响,如振动及空气流动等,不可避免地将噪声引入正规信号中。干涉图像预处理就是改善图像中所承载的信息,清除图像中无关信息,去除噪声,恢复有用信息,抑制不需要的变形或增强后续处理重要的图像特征。其目的是得到一幅没有干扰的清晰图像。图像预处理一般包括图像增强、图像平滑和图像锐化等[3]。
3.1.1图像增强
针对灰度图像,图像增强是指提高图像的亮暗对比度,由此加大亮暗差异的目标特征[4]。图像增强的方法很多,下面仅以直方图规定化算法为例展开。直方图规定化算法主要有3个步骤:
(1)对原始图像进行直方图均衡化:tk=T(sk)=ps(si),k=0,1,2,…,M-1(M为原始图像的灰度级数)。
(2)对规定图像进行直方图均衡化:ul=Tu(uj)=pu(uj),l=0,1,2,…,N-1(N为规定图像的灰度级数)。
(3)将步骤(1)和步骤(2)的直方图进行映射,即将所有的ps(si)与pu(uj)之间形成一对一映射。处理的结果如图3所示。
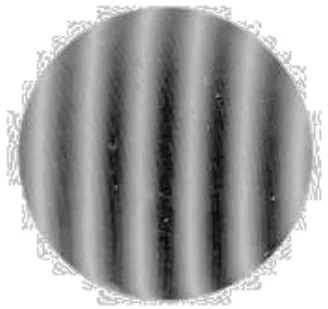
图3 直方图规定化后增强图
3.1.2抑制噪声
由于噪声的随机性与图像信号在时间和空间上的相关性,噪声对像点的影响将使其灰度与邻点显著不同,或帧间对应点灰度显著不同。图像抑制噪声也称图像滤波,实现方法就是按照这个原理设计的。图像滤波抑制噪声的算法有很多种,典型的算法有空域中的平滑滤波和锐化滤波,频域中的低通滤波、高通滤波和同态滤波等。选择中值滤波算法处理经增强后的图像,中值滤波是一种非线性平滑滤波,其具体步骤如下:
(1)设定一个有奇数点的中值滤波窗口模板,并将模板中心与干涉图中的某个像素点重合。
(2)读取模板下各对应像素的灰度值,并将这些灰度值升序排列。
(3)找出其中排在中间的1个像素值,将该值赋值给对应模板中心位置的像素。
选用5×5邻域模板,处理结果如图4所示。

图4 5×5邻域中值滤波效果图
3.2干涉图像二值化
对经过滤波等预处理之后的干涉灰度图进行灰度压缩,将干涉条纹转换为只有黑白两种灰度值,也就是所谓的“二值图像”。可以采用阈值分割的方法对干涉图像进行二值化,设原始图像f(x,y)为像素在(x,y)处的灰度值,T为二值化阈值,将图像按照阈值进行分割得到的二值化图像为g(x,y)[5],二者之间的关系满足:
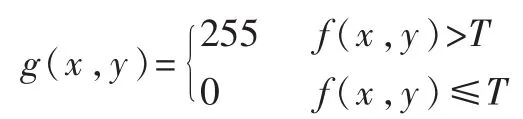

图5 二值化图像
按照上面的方法,处理结果如图5所示。
3.3干涉图像细化
要分析干涉条纹,最主要的就是要找出干涉条纹的中心线,即干涉条纹的骨架。使经过二值化的黑白条纹变细,得到只占一个像素位置的条文线点集,从而提取出条纹中心位置信息[6]。
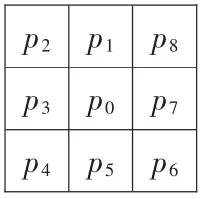
图6 p0的8邻域示意图
设p0为待细化的二值化图像的像素点,该像素点的8邻域各点排列如图6所示。用n(p0)表示8邻域内非0像素的个数,s(p0)表示以p1、p2、p3、p4、p5、p6、p7、p8、p1为顺序的序列中,像素从0变到1的次数。
具体算法主要是判断满足以下4个条件的黑点删除。
(1)2≤n(p0)≤6;
(2)s(p0)=1;
(3)p1&&p3&&p7=0或s(p1)≠1;
(4)p1&&p3&&p5=0或s(p3)≠1;
重复判断图像中每个点,直到所有点都不可删除为止。处理的结果如图7所示。
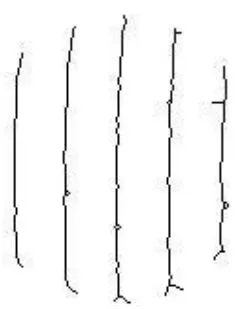
图7 干涉条纹细化结果
3.4干涉图像骨架修复
经过细化的条纹之间可能出现间断区域或者分叉点情况,在进行条纹级次标定之前必须将这些异常情况去除掉。具体算法如下:
(1)判断端点和分叉点。
(2)从端点出发,跟踪骨架像素点的权值并累加。
(3)设置分支重要性权值W,如果跟踪到一分支点,判断分支的重要性权值,如果小于W,则为毛刺,应去除;否则为一般分支,应保留。
(4)重复步骤(3),扫描整个干涉细化图像[7]。
骨架修复结果如图8所示。

图8 骨架修复结果
3.5干涉级次标定
条纹干涉级次的确定是处理干涉图像的重要步骤之一,也是干涉图像处理区别于其他类型图像的最大不同点。对细化的条纹进行跟踪,对每根条纹标记上级次(相对级次p=1,2,3…),以便在后续的处理中计算机能够分辨出不同级次的条纹[8]。算法如下:
(1)在垂直条纹方向画一条能贯穿所有条纹的直线l;
(2)依次标定直线与条纹的每个交点;
(3)在骨架线的端点处标记出交点对应的级次p,p值为1,2,3…。
其处理的结果如图9所示。
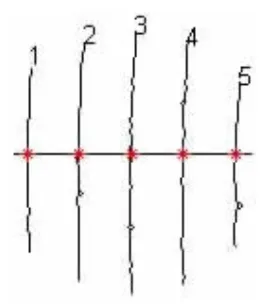
图9 干涉级次标定示意图
3.6数据采样
干涉图经细化和级次标定后,最重要的工作就是对它进行数据采集。采样点的设置算法如下:
(1)在垂直条纹的方向上以一定的间距设置采样线贯穿整个干涉图像区域;
(2)提取采样线与细化条纹相交处的坐标位置(x,y)和该条纹的级次信息(x,y,p);
(3)重复执行步骤(2),可以采集整幅图像的数据集合:(xi1,yi1,pi),(xi2,yi2,pi),…,(xin,yin,pi),其中pi为第i条干涉条纹的级次,(xin,yin)为该条纹上第n个点的坐标。
图像采样结果如图10所示。

图10 图像采样示意图
4 结论
采样结束即完成了对数字化干涉图的图像处理过程,并且获得了一个离散的、采样点随机分布的波面数据集合(x,y,p)。综合上面的算法设计与实现,利用数字图像处理技术可以很好地处理干涉图像,而且数字图像的各阶段的算法种类很多,结合干涉图像的特点,需要选用合适的算法才能达到预期的效果。这种基于数字图像处理技术的应用,为后续波面拟合奠定了基础。
[1]刘中本.光电测试技术[M].西安:陕西人民出版社,2002.
[2]兰明强.基于波面拟合法面形偏差检测技术研究[D].福州:福建师范大学,2013.
[3]孙燮华.数字图像处理原理与算法[M].北京:机械工业出版社,2012.
[4]姚敏.数字图像处理[M].北京:机械工业出版社,2008.
[5]王新强,张丽娟,班宝龙,等.基于滤波图像相减二值化的干涉条纹骨架线提取的研究[J].激光杂志,2012,33(6):28-29.
[6]冉铮惠,陈长龄,罗克莲,等.数字图像处理在平面等倾干涉测量中的应用[J].仪器仪表学报,2003,24(4):57-61.
[7]李艳华.光干涉图像的滤波和骨架化算法研究[D].哈尔滨:哈尔滨工业大学,2011.
[8]林敏,黄建军.干涉图像数字化处理技术[J].深圳大学学报(理工版),1999,16(1):24-27.
Research on digital image processing algorithms of interference fringes
Wang Fei1,2,Li Jinhui1,Fan Boyang3
(1.School of Science,Xi′an Technological University,Xi′an 710021,China;2.North Institute of Information Engineering,Xi′an Technological University,Xi′an 710025,China;3.School of Automation,Northwest Polytechnical University,Xi′an 710072,China)
In order to analyze optical wave surface,firstly,interference fringes of optical plane can be collected through Zygo interferometer.Then,there are a seriesofdigitalimage processing steps,including image enhancement,noise reduction,thresholding,thinning,skeleton reconstruction,fringes level labeling and coordinate data collection to manipulate.The paper is based on the steps to process an image of interference fringes for analysis surface pattern of optical flat surface.
interference fringes;image enhancement;fringes level;data collection
TP301;TP391
A
1674-7720(2015)10-0032-03
2014-12-25)
王飞(1974-),男,硕士,讲师,主要研究方向:数字图像处理、计算机网络及应用。
李晋惠(1962-),女,教授,硕士生导师,主要研究方向:计算机视觉与数字图像处理、嵌入式系统及应用。
范博洋(1991-),男,学士,主要研究方向:自动化。
