基于Infineon XC2267的电机控制系统设计
2015-10-17郝润科
尹 刚,郝润科,黄 伟,栾 健
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于Infineon XC2267的电机控制系统设计
尹 刚,郝润科,黄 伟,栾 健
(上海理工大学 光电信息与计算机工程学院,上海 200093)
在电动汽车的研究当中,驱动电机及其控制系统设计尤为重要,文中基于英飞凌公司的16位微控制器芯片XC2267,设计了电动汽车用永磁同步电机磁场定向矢量控制系统。对控制系统部分硬件电路进行了设计,并在Simulink仿真环境下建立电机控制系统的的仿真模型。仿真结果表明,系统设计合理、电机运行响应快、稳定性好,而且对永磁同步电机实际控制系统具有一定的指导意义。
永磁同步电机;Infineon;矢量控制;Simulink
电机驱动系统是电动汽车的关键部件之一。永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)伺服调速性能优越,去除了直流伺服电机的额机械换向器和电刷,使结构更加简单;且具有质量轻、体积小、功率因数高等优点;被广泛应用于对精度和性能要求较高的领域。
本文基于磁场定向控制(FOC)原理,设计了以资源丰富和高速响应为特点的英飞凌16位微控制器XC2000作为主控芯片构建一个高性能的永磁同步电机伺服控制系统。最后,在Simulink环境下构建控制系统模型,验证了控制系统的有效性。
1 系统总体控制设计方案
1.1 FOC原理
永磁同步电机矢量控制是在磁场定向坐标上,将定子电流矢量分解成励磁电流分量和转矩电流分量,实现解耦定子电流的完全解耦,然后分别对两者进行调节选择。从而简化PMSM的控制。根据磁势和功率不变原则,将永磁同步电机的三相电压、电流和磁链经过坐标变换由三相ABC静止坐标系下的量变换成d-q旋转坐标系下的量,定子电流矢量被分解为按转子磁场定向的两个相互正交的电流分量,即定子电流的励磁分量id和转矩分量iq。iq调节参考量由速度控制器给出,经过电流环调节后输出d-q轴上的电压分量,即ud和uq。将控制量ud和uq经过反Parke变换后,得到α-β坐标系上的分量uα和uβ。根据uα和uβ值的大小和SVPWM空间矢量合成方法实现矢量控制的输出,达到矢量控制的目的。
1.2 三闭环控制系统设计
系统采用电流、转速、位置三闭环控制来实现对电机的转速控制。
其中速度环的作用在于保证电机的实际转速与指令值一致,消除负载转矩扰动等因素对电机转速的影响。速度指令与反馈的电机实际转速相比较,其差值通过速度调节器产生相应的电流参考信号的幅值,再与通过磁极位置检测得到的电流参考信号相位相乘,既得到完整的电流参考信号,该信号控制电机加速、减速或匀速,从而使电机的实际转速与指令值保持一致。
电流环由电流控制器和逆变器组成,其作用是使电机绕组电流实时、准确地跟踪电流参考信号。位置环产生电机的速度指令并使电机准确定位。通过设定的目标位置与电机的实际位置相比较,利用其偏差通过位置调节器来产生电机的速度指令,当电机初始启动后,会产生最大速度指令,使电机加速并以最大速度恒速运行,在小偏差区域,产生逐次递减的速度指令,使电机减速运行直至最终定位。
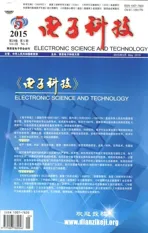
控制系统的内环及外环控制器均为数字控制,都是由XC2267来编程实现。芯片根据给定速度值与经霍尔传感器得到的速度值进行比较运算得到电流给定值,实际为对应的电机给定电压值。伺服系统采用三闭环级联控制模式,主要功能模块包括位置及速度检测、电流采样、PI调节器、SVPWM、坐标变换单元等。设计的伺服控制系统使用CCU6单元比较产生PWM输出信号,通用定时器GPT用于检测转子位置并计算转速,ADC用来采样绕组电流和速度模拟量指令。具体控制系统软硬件结构如图所示。
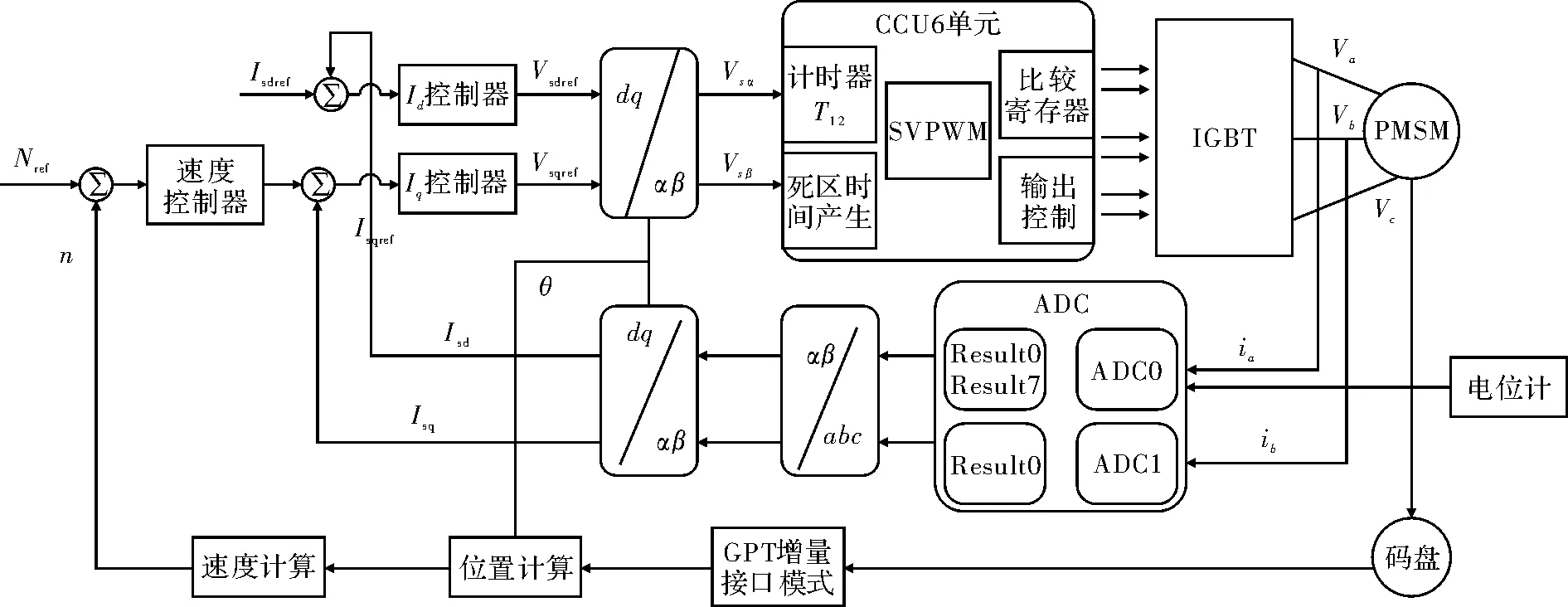
图1 控制系统软硬件结构图
2 硬件电路的设计
控制系统采用XE164FN系列MCU,三相全桥驱动芯片6ED003L6和OptiMOS功率晶体管,电机为永磁同步电机,位置传感器采用光电编码盘,电流传感器采用LEM公司的霍尔传感器。系统供电由36 V直流电提供。
2.1 PMSM驱动电路设计
PMSM驱动电路使用的驱动芯片是英飞凌的3相桥驱动芯片6ED003L06-F,它集成了三相电平转换、门极驱动和电路保护等诸多特性,在缩小芯片尺寸的同时提高了性能,如抗反相瞬态电压的鲁棒性等。
PMSM驱动电路采用DC24~36 V外部电源。6ED003L06-F工作电压为15 V,霍尔传感器工作电压为5 V。15 V电源通过降压型DC-DC电压转换器LM317得到,具体结构如图2所示。
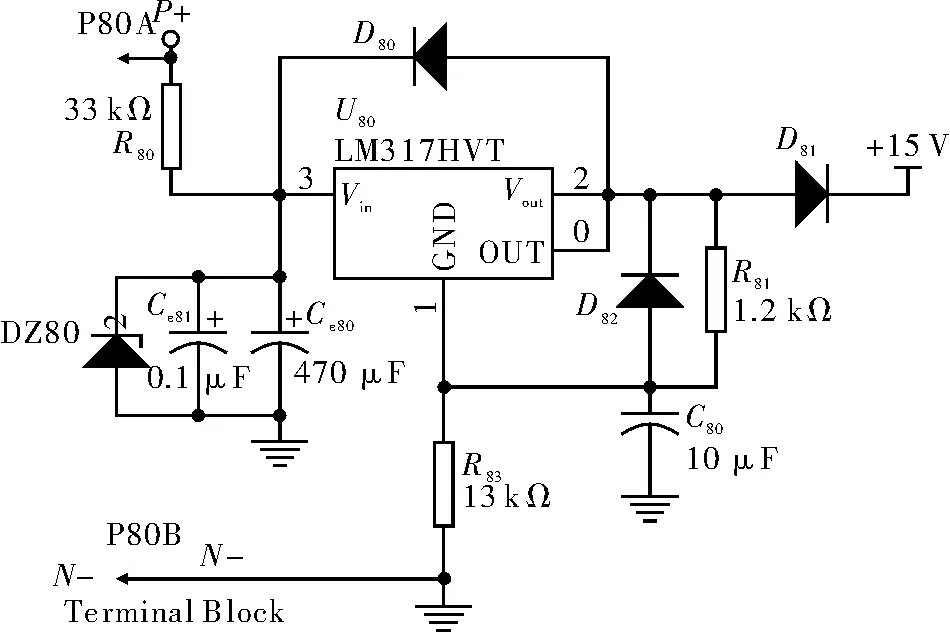
图2 15 V电源电路
2.2 电流采样电路
采用LEM公司的闭环电流传感器LTSR25-NP,该元件具有出色的精度、良好的线性度和最佳的反应时间。LTSR25-NP的测量电流为6~25 A,测量范围为±80 A,精度为0.7%,工作温度为-40~85 ℃。LTSR25-NP可将电流转化为电压信号,其初级额定采样电流IPN=25 A,在25 A时输出电压为3.125 V,0 A时输出电压为2.5 V,输出电压通过单片机的ADC模块进行采样处理。图为V相电流采样的电路图:
图3 电流采样电路
2.3 信号处理电路
该电路通过RC构建低通滤波电路对增量式光学编码器的输出信号进行滤波,同时采用反相器74HC14对信号进行隔离处理,以提高信号的输入阻抗。光电编码器A、B、Z信号处理电路如图所示。

图4 光电编码器A、B信号处理
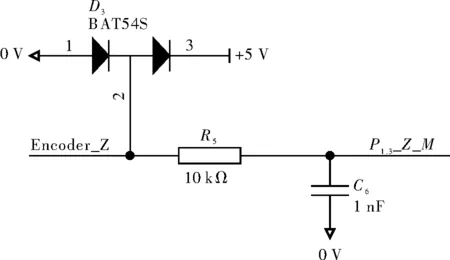
图5 光电编码器Z信号处理
本电路采用总线收发器74HC245来增强PWM信号的驱动能力,以弥补单片机的数据总线端口负载能力不足。具体电路结构如图6所示。
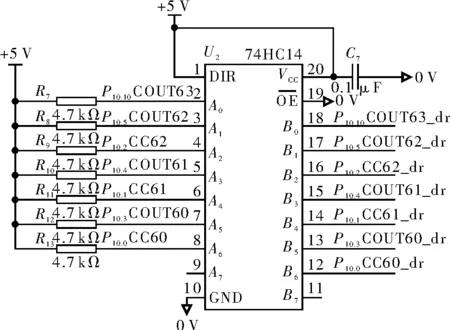
图6 PWM信号处理
3 控制系统软件设计
电机控制系统的软件设计必须满足实时性、可靠性和易维护性的要求。
3.1 主函数
和普通控制系统软件一样,主程序设计相对内容较少,大部分是系统的初始化,复位后首先完成main.c文件中的初始化过程,对各个初始化变量进行赋值。完成初始化后,主函数main()不断执行模拟给定速度采样流程,主函数流程图如图7所示。
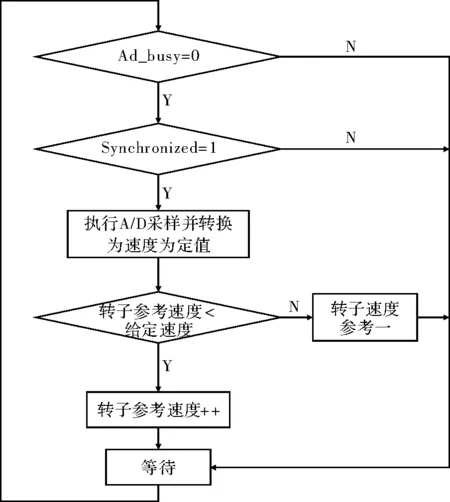
图7 主函数流程图
3.2 CCU6中断函数
在CCU6中断函数中完成的主要程序控制任务包括:
(1)在定时器周期匹配中断中,执行PMSM_FOC()函数实现采样处理以及SVPWM计算,算出SVPWM波形需要的比较时间,并写入通道映射寄存器。
(2)在定时器CCU6的1-匹配中断中是使能映射寄存器传输,就将比较值写入了各个通道的比较寄存器。
(3)Trpf中断是外部保护中断,出现异常时用来封锁PWM输出口并切换至停机状态,起到保护作用。
3.3 PMSM_FOC()函数
CCU6定时器Timer12每100 μs产生一次中断,而PMSM_FOC()函数分成两个阶段。
period_number 1:进行电流采样和位置速度采样,并进行累加计数。计数至给定值count时进行速度环调节,完成Clarke和Parke变换。
period_number 2:执行电流环的PI调节和SVPWM空间矢量生成。

图8 PMSM_FOC函数示意图
4 控制系统建模仿真分析
在Simulink环境下建立了PMSM控制系统的仿真模型,并设定相关参数:额定转速n=3 000 r/min,额定转矩M=4 N·m,极对数p=4,转动惯量J=0.008 kg·m2,定子绕组电阻R=2.875 Ω,母线直流电压Udc=310 V。
为验证所设计的PMSM控制系统仿真模型静、动态性能,系统空载启动,给定的初始速度为500 r/min,在t=0.05 s时给定速度升为2 000 r/min。并在t=0.1 s时突加负载TL=10 N·m,在0.3 s的仿真时间中的到系统的转速、转矩和A相电流仿真曲线如图9~图11所示。

图9 转速响应曲线

图10 转矩响应曲线
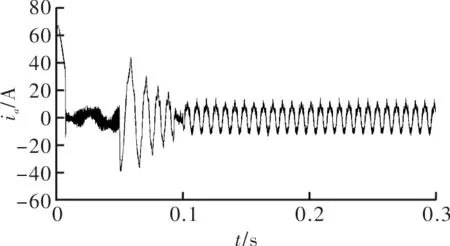
图11 A相电流波形
由图可以看出系统在电机通电以后,迅速到达最大转矩,然后快速回到稳定值,在0.05 s时给定速度上升到2 000 r/min,转矩稍有波动后趋近平稳,在0.1 s时负载转矩突变为10 N·m,输出转矩波形随之给定,实现对电机瞬时力矩的控制如图10所示;转速以直线上升,迅速到达给定值500 r/min,在0.05 s时给定值变为2 000 r/min,转速平稳上升至给定值,在0.1 s负载转矩发生变化时,转速稍有波动如图9所示;定子A相电流的变化如图11所示。由此可以看出,此控制系统响应快,抗干扰性能好,仿真波形与理论分析情况一致,说明了所建模型的正确性和控制策略的有效性。
5 结束语
本文使用英飞凌芯片XC2267实现了对永磁同步电机速度控制系统的设计。设计了系统的各部分硬件电路,包括驱动电路、电流采样电路和信号处理电路等;在控制策略上使用了磁场定向控制;在Simulink环境下进行控制系统的建模仿真,实验结果表明此模型响应快速平稳。
[1] 葛俊阮毅,陈伯时.电力拖动自动控制系统-运动控制系统[M].北京:机械工业出版社,2011.
[2] 余佩倡,吴峻,周文武.永磁同步电机矢量控制系统设计[J].电力电子技术,2011,26(6):51-55.
[3] 王爽,英飞凌.XE166/XC2000单片机开发与应用实例[M].北京:电子工业出版社,2014.
[4] 张钊,陈涛,周勇.永磁同步电机伺服控制系统建模与仿真[J].兵工自动化,2014,33(4):75-78.
[5] VlatkoVlatkovic.Digital-signal-processor-based control of three phase space vector modulated converters[J].IEEE Transactions on IE,1994,41(3):326-332.
[6] O Seta,BoGoSYAN,Metin GoKASAN.An application of EKF for the position control of a siggle link ARM[J].IEEE Transactions on IE,2001,48(6):564-571.
[7] 杨光.带有超级电容储能的永磁同步电机——电梯曳引系统[J].电子科技,2014,27(11):167-170.
[8] 李培江,尤婷.永磁同步电机控制系统的仿真研究[J].计算机仿真,2011,28(6):255-258,307.
Design of a Motor Control System Based on Infineon XC2267
YIN Gang,HAO Runke,HUANG Wei,LUAN Jian
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
In the study of electric vehicles,the design of the drive motor and control system is particularly important.In this article,a control system is designed for the electric vehicle permanent magnet synchronous motor field oriented vector based on Infineon’s 16-bit microcontroller chip XC2267.Part of the control system hardware circuit is designed.A simulation model for the motor control system is established in the Simulink simulation environment.Simulation results show that the system design is feasible,the motor runs fast with quick response and good stability,and is of practical significance for the permanent magnet synchronous motor control system.
PMSM;Infineon;vector control;Simulink
2014- 09- 25
尹刚(1992—),男,硕士研究生。研究方向:电动汽车用永磁同步电机控制和英飞凌芯片的控制。E-mail:917907581@qq.com
10.16180/j.cnki.issn1007-7820.2015.05.029
TM
A