无线网络直流伺服控制系统的研究与仿真
2015-10-15王健刘雪花
王健,刘雪花
(广州大学华软软件学院,广东从化510900)
无线网络直流伺服控制系统的研究与仿真
王健,刘雪花
(广州大学华软软件学院,广东从化510900)
针对无线网络控制系统存在的无线发射功率与系统稳定性问题,在基于TrueTime的网络控制系统仿真工具的平台上,对一个典型的直流伺服控制系统模型进行了仿真研究,通过对功率控制策略、网络协议和功率控制参数进行设置,最终使得系统运行在一个稳定的状态。
WNCS;TrueTime;发射功率控制
1 概述
无线网络控制系统是一种以无线网络为信息传递介质的闭环控制系统。无线网络在控制系统中的引入,一方面使得控制系统部智能化、集成化与可扩展性提高的同时,也使得控制系统会面临一些新的问题,如传输时延、数据包丢失、数据包乱序[1]。因此在研究网络控制系统的时候,一般会通过仿真或实验对提出的控制模型和控制理论进行有效性验证。目前网络控制系统的研究热点集中在数据包的时延与丢失上,考虑到无线网络功率控制对于整个控制系统的稳定的重要性,本文对给定距离与额定电能的无线网络环境下,对无线结点发射功率与系统的稳定性进行了研究与仿真。
2 TrueTime工具箱简介
TrueTime是一个基于Matlab/Simulink的网络控制系统仿真平台,由瑞典Lund工学院的DanHenrik-sson和AntonCervin开发,通过TrueTime可以对网络时延、网络参数、功率控制对系统性能的影响,控制方法和网络调试等多方面进行综合研究,本文采用的Truetime-2.0-beta7,该版本提供有线网络与无线网络两种通信模式,其中有线通信支持CSMA/CD(以太网)、CSMA/AMP(CAN总线协议)、RoudnRobin(令牌环网)等网络模式,无线通信目前只支持802.11 b(WLAN)、802.15.4(ZigBee)和NCM_ WIRELESS三种网络模式。
TrueTime的控制任务可以使用C++或Matlab的M文件编写,TrueTime有6个常用的仿真模块,TrueTimeKernel用于仿真网络控制系统中的传感器、控制器和执行器结点[2]。TrueTimeNetwork用来模拟网络控制系统中的有线通信网络。TrueTimeWirelessNetwork是最核心的模块,支持网络网络的仿真。TrueTimeBattery用来为其他模块提供电源功率。使用了一个简单的积分器模型,因此可以进行重复充电。TrueTimeSend模块进行消息发送,TrueTimeReceive模块进行消息接收[3]。
3 无线网络直流伺服控制系统建模
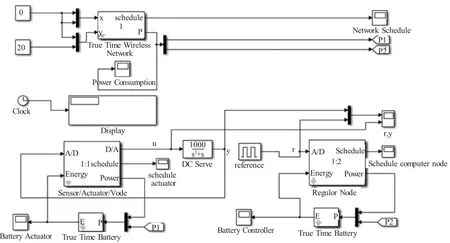
图1 系统仿真模型
3.1控制器与传感器/执行器
系统的仿真模型如图1所示,该网络控制系统包含两个计算结点,并假定距离为30 m,其中Sensor/ActuatorNode用来仿真传感器与执行器结点(简称S/ANode),S/Anode采用时钟驱动方式,对数据进行周期性地采样,并通过无线网络结点将采样信息发送至控制结点RegulatorNode(简称RNode),Rnode为事件驱动,采用PID方法产生控制信号,用以控制直流电机,被控制直流电机的传递函数为
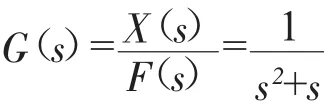
离散PⅠD控制器为:

其中:K为比例增益;h为采样周期;N为采样次数;r(k),y(k),u(k)分别k时刻的参考输入、对象输出和控制命令,P(k),D(k)分别为k时刻的比例、微分控制。
3.2网络传输模块
TrueTimeWirelessNetwork(简称TTWNetwork)结点,采用无线网络模块分别选择IEEEE802.11b(WLAN)协议进行实验,调度采用prioFP进行调度。通信速率分别设定为800 000 bits/s。
3.3程序设计
1)初始化,包含对输出和输出端口数进行指定、选择优先级函数、定义代码函数、建立线程与中断句柄等工作。S/Anode结点初始化由regulator_init.m进行定义,Rnode初始化由actuator_init.m进行定义。
2)控制函数编写。系统的主要控制代码如下:
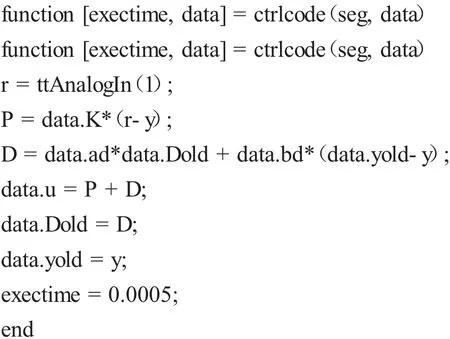
设定采样周期为T=10 ms,传感器到控制器预计延时为0.4 ms,控制器计算时间预计0.5 ms,控制器执行器预计延时为0.5 ms,所以整个闭环控制系统预计延时为1.4 ms。设定比例增益K=1.5,微分常数Td=0.035。
3.4无线网络控制系统功率控制策略研究
功率控制策略同时会运行在S/Anode与Rnode上。Rnode会周期性的发送ping消息到S/Anode结点,用以测试链路的工作状态,如果收到响应,则说明链路使用率低且状态良好,则可以减少各结点的传输功率,另一方面,如果没有收到响应,则需要增大传输功率直到收到响应。功率控制函数为:
首次仿真,不进行任何修改,观查两个计算结点的电池剩余量,发现控制器结点在系统运行大约3 s后,电池耗尽,如图2所示。

图2 无功率控制能耗曲线
再次仿真,启用功率控制策略,2 s后功率控制策略被激活,控制器结点在系统运行5 s后,电池耗尽,如图3所示。而此时,通过图4看到测量值在有些时候会偏离参考值,这个可能是由于在该结点执行功率控制策略时,由传感器读取数据的丢失所引起的。
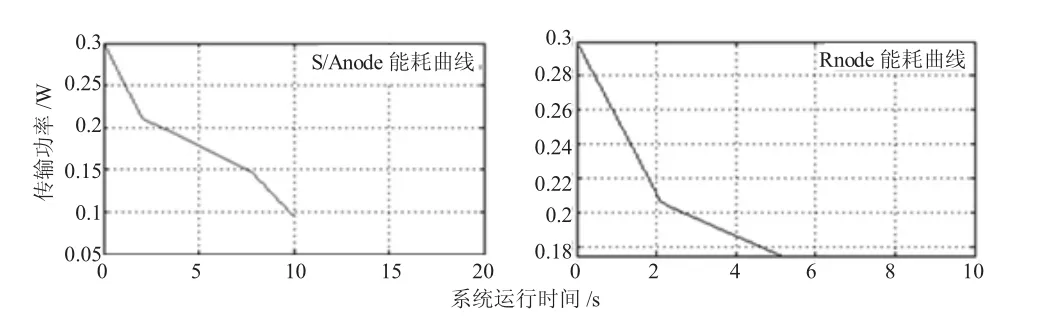
图3 启用功率控制能耗曲线
将传输功率为减少5 dBm,此时节点的传输功率为15 dBm,经计算得出最远传输距离缩减为45.27 m,大于传感器/执行器与控制器之间的距离设定,所以整体性能不受影响,采样偏离预估值的情况有所有好转,控制系统的鲁棒性增强,系统输出仿真曲线如下页图5所示。
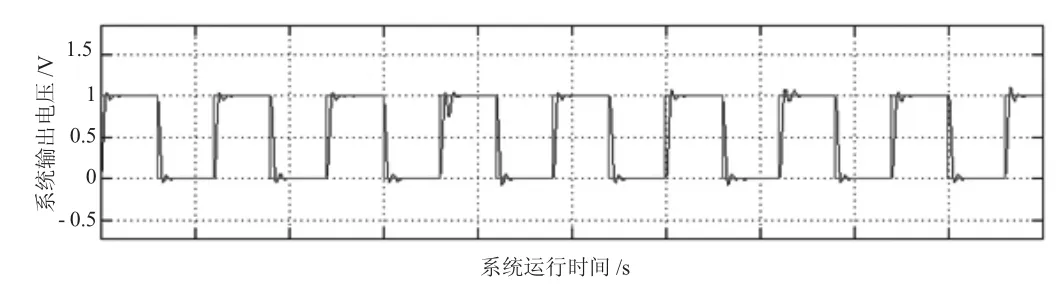
图5 低传输功率下系统输出仿真曲线
4 结语
随着工业制造4.0发展的进程,网络在控制领的应用回越来越广泛,而无线网络在部署、维护与扩展性上的优势正迎合了这一发展的需求[4]。本文讨论了无线网络控制的建模与仿真技术,对无线网络直流伺服控制系统进行了仿真与实验,并对功率控制与稳定性进行了研究,在保证系统稳定性的前提下,给出了最优发射功率控制阈值。
[1]朱其新.网络控制系统与建模[J].信息与控制,2003(1):5-8.
[2]王岩.网络控制系统与仿真[M].北京:清华大学出版社,2009: 118-129.
[3]赵贤林.基于TrueTime的无线网络功率控制系统[J].计算机工程,2010(10):127-128.
[4]田波.基于Truetime的无线网络温度控制系统研究[J].自动化与仪器仪表,2015(3):10-11.
(编辑:王璐)
Research and Simulation of Wireless Networks DC Servo Control System
Wang Jian,Liu Xuehua
(China Institute of Software Engineering,Guangzhou University,Conghua Guangdong 510900)
Aiming at the existing wireless transmission power of wireless network control system and system stability problem in the network control system based on TrueTime simulation tools platform,dc servo control system for a typical model for the simulation research,through the power control strategy,the network protocol and power control parameters setting,eventually making system runs in a stable state.
WNCS;TrueTime;transmission power control
TP273
A
2095-0748(2015)21-0080-03
10.16525/j.cnki.14-1362/n.2015.21.35
2015-10-12
广州大学华软软件学院2014年科学研究课题立项(编号:KY201413)
王健(1981—),男,湖北黄冈人,硕士,讲师,研究方向:网络化测控、信息安全;刘雪花(1983—),湖北黄石人,硕士,讲师,研究方向:自动化、物联网技术。
