基于模糊神经滑模观测器的永磁同步电机无传感器控制
2015-10-13肖根福周燕辉
肖根福,周燕辉,刘 欢
基于模糊神经滑模观测器的永磁同步电机无传感器控制
*肖根福1,周燕辉1,刘 欢2
(1.井冈山大学机电学院,江西,吉安 343009;2. 井冈山大学电子与信息工程学院,江西,吉安 343009)
为了解决传统滑模观测器的抖振问题,提出了一种用于永磁同步电机的模糊神经滑模观测器。分析了滑模增益对抖振的影响,并采用模糊神经网络动态调整滑模增益以改善抖振,利用李雅普诺夫函数证明了模糊神经网络观测器的稳定性。利用锁相环方法提取转子位置与速度信息,减小由高频噪声引起的误差。仿真结果表明:改进后的滑模观测器能够对永磁同步电机转子位置进行精确辨识,有效地抑制了抖振,实现了高性能的永磁同步电机无传感器控制。
永磁同步电机;矢量控制;滑模观测器;模糊神经
位置传感器可以准确获取永磁同步电机转子位置用于矢量控制,但位置传感器增加了系统成本,增大了控制系统的体积,而且位置传感器对环境条件要求很高,系统的精度难以保证[1-3]。为了解决上述问题,无传感器控制技术成为研究热点[4]。滑模观测器获取转子位置信息是无传感器技术的一种,具有算法简单、响应快、易于工程实现和稳定性好、鲁棒性强的特点。
滑模观测器用观测电流与实际电流的差值来重构电动机的反电动势,能方便地估算出转子位置。但由于采用了符号函数,传统滑模观测器存在严重的抖振问题[2,5-7]。本文提出了一种基于模糊神经网络的滑模观测器,结合模糊逻辑与神经网络的各自优点来动态调整滑模增益,从而减弱抖振。同时,将观测器得到的反电动势信息构造锁相环来估计转子位置与转速,减小了估计误差。
1 数学模型
1.1 永磁同步电机数学模型
永磁同步电机在a-b静止坐标系中的电流方程为:
式中:R为定子电阻,L为定子电感,、为反电动势,、为定子电流,、为定子电压。
1.2 传统滑模观测器
其中()为符号函数,k为滑模观测器的切换增益,取值要满足滑模的存在性、可达性和稳定性。
电流误差的开关信号中含有反电势的估算信息,通过一个低通滤波器之后滤除掉其中的高频成分,得到光滑的反电势估算值信号。
其中为低通滤波器的截止频率。
通过反电动势可以估算出转子的角度,对角度进行微分可以得到转速的估计值:
传统滑模观测器的结构如图1所示。
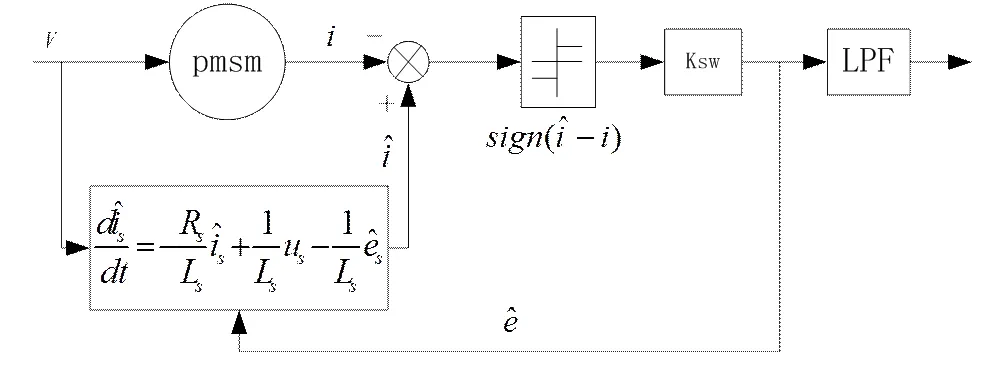
图1 传统的滑模观测器
2 模糊神经滑模观测器
2.1 滑模切换增益的作用分析
滑模控制需要无穷频率的切换来维持滑动模态,但无穷频率的切换在实际中是难以实现的,这是系统产生抖振的根本原因。
对于符号函数,滑模等效收敛时间可以用下式表示[3]:
由上式可知,滑模增益K值将影响抖振幅值,一般来说,在远离切换面时,为了加快到达滑模面的速度,K要取较大的值,而在切换面附近时,为了减小抖振,要减小K的值。所以需要一种方法来动态调整K值,以适应系统运动的不同状态,从而减弱抖振。
2.2 模糊神经滑模观测器
模糊神经网络建立在人工经验基础上,是模仿人的经验和人的思维的智能方法,结合了模糊逻辑与神经网络的各自优点。
为了减小抖振,充分利用不同切换增益对系统的影响,使用模糊神经网络对滑模观测器的切换增益进行动态调整。基于模糊神经网络的滑模观测器原理见图2。

图2 模糊神经滑模观测器
如图2所示,模糊神经网络有两个输入端,系统状态的偏差是,系统状态的偏差变化是d,模糊神经网络的输出为K,根据模糊推理规则,由和d的不同划分得出相应的K。偏差和偏差导数d的模糊属性用正大(PB)、正中(NM)、正小(PS)、零(O)、负小(NS)、负中(NM)、和负大(NB)来表示。
在模糊推理规则中,隶属度函数由人的经验确定,不能适应对象和扰动的动态特性的变化,将会影响推理结论的准确性,而神经网络具有自学习能力,能够对隶属函数和规则进行动态修正。

图3 模糊神经网络结构
如图3所示,模糊神经网络输入层由2个输入节点和d组成,模糊层的任务是对输入向量进行模糊划分,输入的模糊划分空间数为7,模糊隶属函数使用高斯函数:
式中和代表高斯函数的中心和宽度。
在规则层中,由输入样本模糊空间的划分情况决定模糊规则数目,与2个输入的7个模糊空间分别对应,模糊规则数为49,每一条模糊规则由一个节点表示。规则层中计算方法如下。
式(8)中,∈[1,49],∈[1,7],∈[1,7]
输出层输出信号:
采用误差反传算法修正,,。定义误差函数为。用添加动量项法和变步长法来克服标准BP算法的缺点。网络连接权学习规则如下:
2.3 模糊神经滑模观测器的稳定性
为了证明模糊神经滑模观测器的稳定性,构造李雅普诺夫函数为:
显然上式中第三项恒小于0,因此K需要满足以下条件。
因此只要满足模糊神经网络输出的K的边界值大于反电动势幅值的最大值即可保证模糊神经滑模观测器的稳定性。
2.4 转子位置与速度估计
使用锁相环技术来减少高频噪声影响,锁相环表达式为:
锁相环结构如图4所示。

图4 锁相环结构
3 仿真与结果分析
建模在Matlab/Simulink中进行,如图5所示。取i= 0的矢量控制方法,输入转速采用阶跃函数。永磁同步电机参数为Rs=2.875Ω, Ld= Lq= 0.0085H, ψf= 0.175Wb, J = 0.001kg·m2,P=4。仿真研究时,反馈量分别通过传统滑模观测器和模糊神经滑模观测器估计得到。
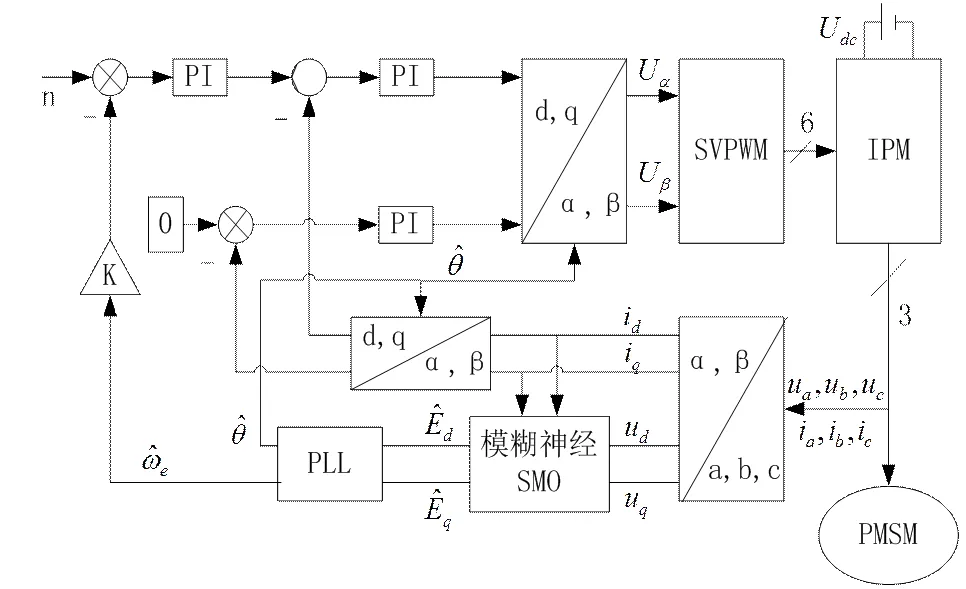
图5 永磁同步电机无传感器矢量控制框图
图6为给定转速为1500 r/min时,电机转速的响应情况,从中可以看出基于模糊神经滑模观测器的永磁电机无传感器控制系统具有调节时间短、超调量小、稳态精度高的特点。

(a)传统滑模观测器 (b)模糊滑模观测器
图6 滑模观测器的速度响应
Fig.6 Velocity response of SMO
由图7(a)可知,传统滑模观测器估计的反电动势包含大量谐波、抖振严重。由图7(b)可知,模糊神经滑模观测器估计的反电动势很好地抑制了抖振带来的负面影响,得到了平滑的波形。通过上述对比可以看出,模糊神经滑模观测器能够较好地削弱抖振。
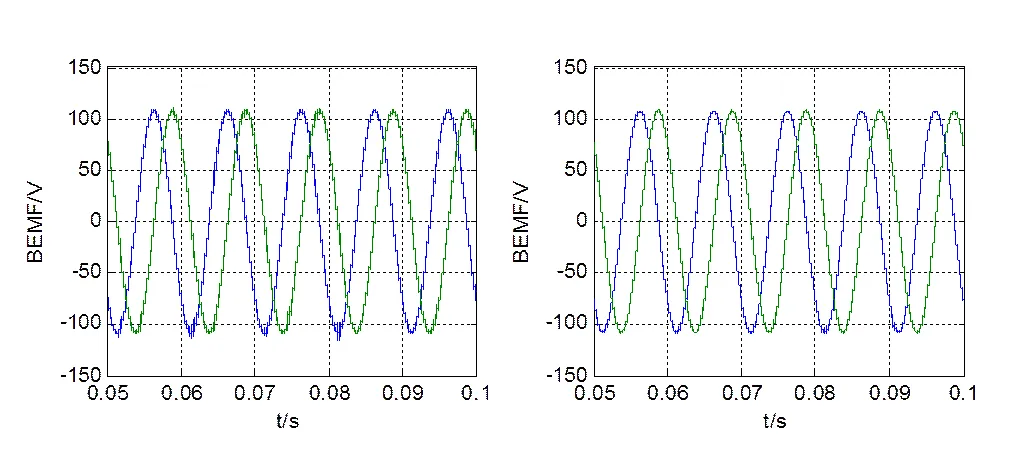
(a)传统滑模观测器 (b)模糊滑模观测器
图7 估计的反电动势波形对比
Fig.7 The estimated back EMF
图8为滑模观测器转子位置情况,可以看出模糊滑模与传统滑模相比抖动较小、精度较高。

图8 滑模观测器转子位置
图9为模糊滑模和传统滑模观测器估计得到的位置与电机实际位置之间的误差。估计位置的误差在电机旋转周期中基本保持为零,只是在每个周期末端,估算位置与实际位置存在微小误差,图中的脉冲就是这个微小的误差的体现,脉冲越宽则误差越大。由图可知,脉冲宽度较小,估计位置与实际位置误差较小。
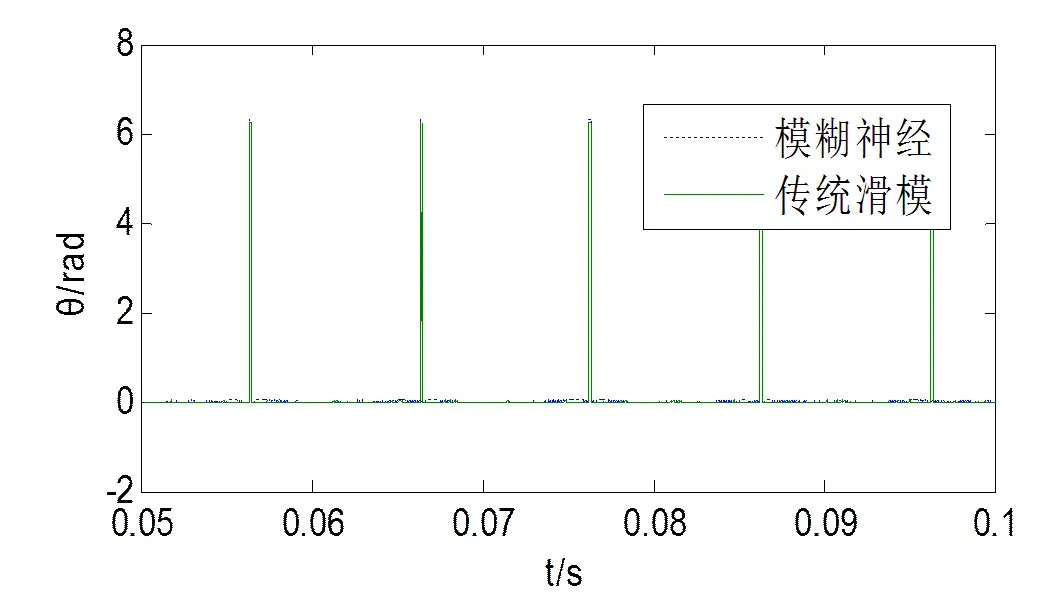
图9 估计位置与实际位置误差
图10由图9局部放大得到,可以看出,虚线比实线更接近零,而且虚线脉冲宽度比实线脉冲宽度小得多。可见仿真结果能够证明模糊滑模观测器较好地减小了位置估计误差,比传统滑模观测器的观测精度更高。

图10 误差放大
4 结论
1)模糊神经滑模观测器通过模糊神经网络动态调整滑模增益减弱了开关函数带来的抖振,位置辨识精度比传统滑模观测器高,对滑模观测器的优化效果明显。
2)模糊神经网络可以发挥模糊逻辑和神经网络各自优点,所构建滑模观测器由李雅普诺夫稳定判据可知是稳定的。可见模糊神经网络在滑模观测器改进方面有较大价值,是滑模观测器改进的一个重要发展方向。
3)利用模糊神经滑模观测器构建的无传感器控制系统具有良好的动静态性能,为永磁同步电机的控制系统设计提供了较好的参考。
[1] Kommuri S K, Veluvolu K C, Defoort M, et al. Higher-order sliding mode observer for speed and position estimation in PMSM[J]. Mathematical Problems in Engineering, 2014, 14(5):1-12.
[2] Bernardes T, Foletto Montagner V, Grundling H, et al. Discrete-time sliding mode observer for sensorless vector control of permanent magnet synchronous machine[J]. IEEE Transactions on industrial electronics, 2014, 61(4):1679-1691.
[3] 陆婋泉,林鹤云,冯奕,等. 永磁同步电机无传感器控制的软开关滑模观测器[J]. 电工技术学报, 2015, 30(2):106-113.
[4] 张洪帅,王平,韩邦成,等. 基于模糊滑模观测器的磁悬浮高速永磁同步电机转子位置检测方法[J]. 电工技术学报,2014, 29(7):147-153.
[5] 刘艳莉,张烨,吕继考,等. PMSM改进型滑模观测器无传感器参数辨识[J]. 电力系统及其自动化学报,2014, 26(4):30-34.
[6] 王辉,马军,刘红霞. 基于智能滑模观测器的PMLSM调速系统研究[J]. 电气传动,2014, 44(6):54-57.
[7] 罗清伟,曹广忠,汪济欢. 基于改进的滑模观测器无传感器永磁同步电动机矢量控制[J]. 微特电机,2014,42(3):55-60.
SENSORLESS CONTROL OF PMSM BASED ON FUZZY-NEURAL NETWORK SLIDING MODE OBSERVER
*XIAO Gen-fu1, ZHOU Yan-hui1, LIU Huan2
(1. School of Mechanical and Electrical Engineering, Jinggangshan University, Ji’an, Jiangxi 343009, China;2. School of Electronics and Information Engineering, Jinggangshan University, Ji’an, Jiangxi 343009, China)
In order to solve the chattering problem of conventional sliding mode observer for a permanent magnet synchronous motor (PMSM), a fuzzy-neural network sliding mode observer was proposed. The effect of sliding mode gain to chattering was analyzed. The fuzzy-neural network dynamically adjusts sliding mode gain to reduce the chattering. The stability of the fuzzy-neural network sliding mode observer was proved through Lyapunov function. The method that the phase-locked loop extracts the rotor position and speed information was utilized in order to reduce the error caused by the high-frequency noise. The validity of the proposed algorithm has been demonstrated with experiments.
permanent magnet synchronous motor; sensorless control; sliding mode observer; fuzzy-neural network
1674-8085(2015)05-0074-05
TM351
A
10.3969/j.issn.1674-8085.2015.05.014
2015-06-30;修改日期:2015-07-28
江西省科技支撑计划项目(20142BBE50057);江西省自然科学基金(青年基金)项目(20151BAB217012)
*肖根福(1980-),男,江西赣州人,讲师,博士,主要从事智能控制、建模与优化研究(E-mail:xiaogenfu@163.com);
周燕辉(1971-),男,江西安福人,副教授,硕士,主要从事机械设计研究(E-mail:yhzhou_99@163.com);
刘 欢(1981-),女,江西吉安人,讲师,博士,主要从事图像处理、建模与优化研究(E-mail:liuhuan816618@163.com).
