基于以太网络的宇航用高清摄像机的硬件设计
2015-10-10袁承宗蔡非凡
袁承宗,李 贤,张 震,叶 盛,蔡非凡
(上海电子技术研究所,上海 201109)
基于以太网络的宇航用高清摄像机的硬件设计
袁承宗,李 贤,张 震,叶 盛,蔡非凡
(上海电子技术研究所,上海 201109)
由于目前现有工业用摄像机无法满足空间大温度范围、强振动环境等要求,提出了能够适应空间环境的基于以太网络视频传输的高清一体摄像机。该摄像机在完成包括H.264,JPEG2000,MPEG4等图像编码算法的同时,支持空间以太网络协议进行传输和控制。针对宇航环境使用要求,从结构设计、力学设计、热设计、电磁兼容设计等方面进行可靠性设计和仿真验证,满足质量轻、温度适应性好、可靠性高等要求。经过鉴定试验验证,所设计的高清一体摄像机可以可靠地在空间严苛环境中工作。
宇航用;高清;摄像机;可靠性设计和验证
随着载人飞船和空间实验室的成功发射和对接,我国的航天事业受到前所未有的关注。在整个发射、飞行、回收过程中,对于飞船舱的飞行状态、宇航员舱内活动等情况都希望能够有实时的图像视频进行监控。目前,支持1 080p及以上的高清CMOS(Complementary Metal Oxide Semiconductor)图像传感器已经广泛应用于民用视频监控领域,随着图像技术的飞速发展,在宇航环境中进行高清实时监控也成为可能。本文主要设计基于空间以太网络视频传输的高清一体摄像机。该摄像机使用TI公司的TMS320DM6467为主要处理核心,完成包括H.264,JPEG2000,MPEG-4等图像编码算法,支持UDP,RTP,TCP/IP等多种网络传输协议[1]。针对宇航环境使用要求,本文从结构、力学、热等方面阐述如何设计满足质量轻、温度适应性好、可靠性高的高清摄像机。
1 高清摄像机的系统设计方案
根据对性能指标的分析,摄像机拟选用大视场单镜头带静态JPEG压缩和动态H.264压缩的高清一体机的方案。
摄像机由光学系统、CMOS图像传感器成像系统、图像控制和图像压缩处理系统、对外输入输出接口模块、电源处理模块和机械结构系统等部分组成。光学系统对光线进行采集和处理,将视场内物体成像于CMOS靶面;CMOS图像传感器成像系统控制CMOS图像传感器及对图像原始数据进行预处理;图像控制和图像压缩处理系统对图像数据进行获取、采集并压缩后打包通过以太网口输出;对外输入输出接口模块主要实现数据输出网络化、遥控指令接收、模拟遥测量输出;电源处理模块为各个系统提供电力能源;机械结构则为以上各个部分提供物理支撑和保护。
下文主要对图像采集、图像预处理、视音频编码3个主要模块进行分析。
2 高清摄像机的主要硬件模块设计
2.1 图像采集模块设计
图像采集模块主要由CMOS图像传感器及其外围电路组成。根据单机指标要求,需要选择一款低功耗、高灵敏度、低噪声、适应高动态范围的CMOS传感器。根据上述选型分析,选择CMOSIS公司的CMV4000传感器。
CMV4000是一款不带片上系统(SOC)的CMOS传感器,光学尺寸为1 in(25.4 mm),最大像素为2 048×2 048。它能在线性或高动态范围模式通过全局快门进行图像捕获,同时还具备如自动曝光控制、开窗、视频及单帧模式等功能[2]。
这款CMOS传感器采用RGB Bayer彩色模式,输入时钟为5~48 MHz的TTL电平或50~480 MHz的LVDS电平。图像信号的捕获由CMV4000内部时序产生。图像以像素方式存储(全局快门)输出时,模拟增益可设为×1.0,×1.2,×1.4 和×1.6。输出的像素经过列ADC后转为数字信号,经过多组LVDS通道输出。每个LVDS通道一次读取128个列。通过行译码器可将感兴趣的行输出。通过四线制SPI总线接口,改变CMOS传感器内部寄存器的设定值可以对传感器的电子增益、像素积分时间、传感器曝光时间、输出图像大小、输出图像位置和图像输出帧率分别进行控制[3]。
2.2 图像预处理模块设计
针对CMV4000图像传感器,图像预处理模块主要设计架构如图1所示。

图1 预处理模块和压缩模块之间的架构
预处理模块主要由FPGA及外围电路组成,FPGA选用Xilinx公司的Virtex-4 QPro-V系列的XQR4VSX55。
CMV4000作为CMOS传感器,输出串行(12/14/20 bit)或并行(10/12 bit)数据送至FPGA,FPGA做图像预处理,如AE、AWB、色彩校正等,通过Color Pipeline处理可完成大部分图像处理功能,如3A处理、黑电平校正、色彩校正、伽马校正、色度空间转换等。Color Pipeline处理算法流程在FPGA中实现,经过处理后通过SPI总线配置相关图像传感器的寄存器,来实现自动曝光等图像预处理功能,以达到在不同环境光照的环境下图像质量相对稳定的效果。通过Color Pipeline处理后数据可直接输出为BT1120高清数字视频流,通过送DM6467进行视频压缩。同时,根据总体需求,在不同码率下对图像分辨率进行变换,以适应不同输出码率的压缩需求。
在进行图像预处理的同时,FPGA对整个摄像机的状态进行监控,通过模拟遥测接口,输出遥测量给遥测系统,使其对整机状态进行监测[4]。
2.3 视音频编码模块设计
图像话音压缩电路主要由DSP及外围电路组成,DSP拟选用TI公司的TMS320DM6467。TMS320DM6467是专为应对高分辨率视频编解码而设计的,是一款基于DSP的SoC,其内部集成了DSP双内核,并集成了两个高清视频和图像协处理器(HDVICP0 和HDVICP1)以及一个视频数据转换引擎。HDVICP0/1协处理器可实现运动补偿、运动估计等运算量巨大的计算,是实现高分辨率视频压缩的核心模块,它可支持H.264,MPEG-2, MPEG-4,JPEG 等标准的编码和解码操作。
在图像压缩模块中,由FPGA将待压缩的图像数据通过专用的VPIF接口,以BT1120的标准协议传输到DM6467中。本设计中对视频图像的压缩编码使用H.264编码标准。H.264具有比以前各种标准更好的压缩效率。在各个模块的实现细节方面,做了很大的改进,如采用了帧内预测编码、采用了1/4像素运动估计、支持宏块分割、使用抗块效应滤波器等技术,从而有效地提高了编码效率[5]。
H.264的算法可以分为两层:视频编码层(Video Coding Layer,VCL)负责高效的数字视频数据压缩;网络提取层(Network Abstraction Layer,NAL)负责以网络所要求的恰当的方式对数据进行打包和传送,完成高清视频编码。利用基于小波变换的JPEG2000算法,对静态图像进行压缩。为与二期载人航天视频体系兼容,保留了原有的MPEG4的压缩制式,以便于其他型号飞船、地面系统等保持一致[6]。
音频编解码器采用TI公司的TLV320AIC23B,该芯片是一种高性能的立体声音频编解码器与高度集成的模拟功能器件。TLV320AIC23B内部的模拟数字转换器(ADC)和数字模拟转换器(DAC)使用的是多位Σ-Δ技术的综合采样数字插补滤波器。数据传输字长为16 bit,20 bit,24 bit或32 bit,支持采样率从8 kHz到96 kHz。
此外,本模块还包括了话音采集及模数变换电路(话音CODEC)。话音CODEC最主要的工作有2个,第一个就是将由外界录进来的声波,从模拟转成为数字的信号交由计算机系统处理,不论是从Mic In或是Line In录进来的模拟信号都必须经过这个程序,才能够让计算机看得懂这些资料。另一个则是反向的流程工作,也就是将储存在计算机中的数字音讯资料,透过CODEC还原成模拟的声音,由Line Out或是多声道声卡的各声道输出口送出信号。由此可知,CODEC在声卡的组件之中所扮演的角色相当关键,没有CODEC就无法转换信号的类型,重要性不低于音编解码器。
3 宇航用摄像机可靠性设计
3.1 电源部分设计
本系统一共需要以下几个类型的电源:+3.3 V数字电源,+3.3 V模拟电源,+2.5 V数字电源,+1.8 V数字电源,+1.2 V数字电源,地信号。
系统统一由100 V直流电压供电,为考虑电源转换效率和电源噪声之间的平衡,一次母线的100 V电压使用高效率的DC/DC,由于DC/DC输出电源纹波较大,作为图像传感器的电压输入会明显提高噪声水平,影响图像质量,因此在二次电源中各种电压由各线性稳压器分压得到,以控制噪声对图像的影响。通过电感分别连接+5 V的数字和模拟电压。由于本系统对于数字部分的功耗比较低,同时涉及到模数混合电路板设计,对电源的纹波要求有限制。考虑到EMC要求,在电源的输入端采用了一片EMI滤波器,同时在电源输入输出端均采用了大量LC差模滤波电路和共模滤波电感,减少输入电压的纹波,保证了电源纹波小于等于10 μV。
考虑到可靠性及安全性的要求,产品在电源输入端使用了2 A的熔断丝,确保产品内部发生短路的情况下,不影响供电母线的安全。
3.2 结构部分设计
整个图像采集器内部共有多块电路板组成,加上安装EMI滤波器的一块印制板,板与板之间通过电连接器连接;通过将各块板子分别用塑料压片压固在机身内部3个面上的方法,将电路板充分减震固定,后部通过电缆将电源输入和视频输出连接到后部接插件上;镜头通过安装法兰通过螺钉与机身紧固;由于单镜头的重量为670 kg,长度为74 mm左右,直径为95 mm,与机身相比,两者重量、体积基本相当,要保证安装尺寸不变,又要考虑力学冲击,只有尽量将安装孔往镜头方向移,最大程度保证质心位置靠近安装面,4个安装孔均加装橡胶减震垫;外壳采用LY12-CZ硬铝,具备一定厚度,减少内部电子元器件所受的辐照损害。
3.3 电磁兼容性设计
EMC设计提倡折衷原则,以系统兼容为主要目的,不追求单机指标最好,不追求单项指标最佳。对摄像机而言,在兼顾重量、体积、功耗及环境适应能力的条件下,对输出的信号进行适当的控制,以实际成像质量为参考标准,合理选取上述指标值。
在电磁兼容设计中,良好的接地可以避免各种噪声的产生,减小电磁干扰的作用,降低对屏蔽和滤波的要求。为了回避单点接地和多点接地的缺点,充分发挥各自的优点,在本设计中,采用混合接地方式。所谓混合接地,就是对电子系统的各部分工作情况作分析,只将那些需要就近接地的点或需要高频接地的点直接通过旁路电容与地平面相连,而其余各点采用单点接地的方法。摄像机中同时存在低频电路和高频电路,因此采用混合接地的方式,低频电路单点接地,高频电路多点接地。
4 可靠性设计的仿真验证结果
4.1 力学仿真验证结果
设备的机壳材料选用合金中抗拉强度最高的2A12系列硬铝,抗拉强度不小于43.5 kg/mm2,具有质量轻、强度高、较好的高温性能和理想的塑性等特点,被广泛用于导弹、飞机承力构件。为了保证金属结构件的强度,每个部件的机壳、整机机身都采用整体铣切加工成型,因此结构钢度好,坚固可靠,固有谐振频率较高,避免了在振频低端出现共振现象。
印制板与壳体均采用直径为2.5 mm的螺钉相连,螺钉的有效面积为S=3.18 ,即螺钉的拉压面积及剪切面积均为A=3.18 。则可求得模块连接螺钉的最大压应力
(1)
最大剪应力
(2)
结构的安全裕度
(3)
(4)
可见,结构的安全裕度远远大于1。
此外,根据分析得到与螺钉连接的支柱处Z向最大载荷为-19.41 N,X向最大载荷为-18.23 N,而Y向最大载荷为-6.57 N。从而,支柱最大轴力为-19.41 N,最大剪力为-19.38 N。
设备各层壳体之间用4个直径为5 mm的螺钉相连,螺钉的有效面积为S=13.42 ,即螺钉的拉压面积及剪切面积均为A=13.42 。则可求得模块连接螺钉的最大压应力
(5)
最大剪应力
(6)
结构的安全裕度
(7)

(8)
可见,设备连接件的安全裕度远大于0。
从强度和连接力校核分析得到,结构的安全裕度远远大于1,设备主要连接处螺钉的安全裕度均在200以上,主要连接部位的强度和连接力完全满足要求。
4.2 热学仿真验证结果
对摄像机采用NX8.0进行建模和热分析,分析基于有限单元。以该宇航型号鉴定级试验高温50 ℃为热分析边界条件进行热仿真分析,分析结果表明:单机最高温度点出现在图像压缩模块上,最高温度为74.6 ℃。整机温度场如图2所示,整机剖面温度场如图3所示。
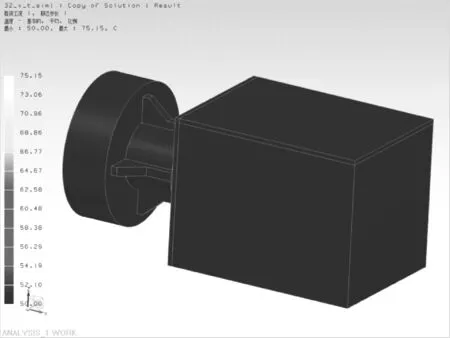
图2 整机温度场(截图)
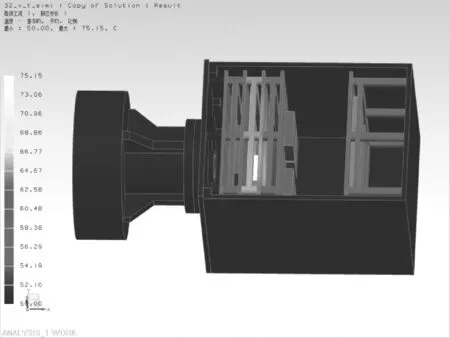
图3 整机温度场剖视(截图)
如图3所示,摄像机内部电源模块和压缩模块的温升最大,其中最大温升出现在压缩模块,模块中DSP芯片上最高温度可达74.6 ℃,网络接口芯片和DDR II芯片的温度也分别达到了72.4 ℃和70.7 ℃,其他模块的温升均低于15 ℃。可见,对于摄像机内部的热源,二次电源模块和接口模块设计中均安装散热铝板直接与机壳底板连接;散热铝板与机壳底板连接面涂导热硅脂,以加强产品的热传导,可有效增强产品的导热性能。对于整机表面温度场,表面温升不大。
通过分析,摄像机中选用的元器件均满足Ⅰ级降额要求,无过热和超出使用温度的情况。
4.3 电磁兼容试验测试结果
为验证EMC/EMI设计有效性,按照GJB151A—97《军用设备和分系统电磁发射和敏感度要求》、GJB152A—97《军用设备和分系统电磁发射和敏感度测量》,通过辐射发射控制试验(RE102)、传导发射控制试验(CE102)等试验,对摄像机整机在加电正常工作的情况进行电磁兼容测试。
根据测试结果,经有效的电源隔离EMI和壳体电磁屏蔽设计,能够通过辐射发射控制试验(RE102)、传导发射控制试验(CE102)的要求,即使在RE102 600~700 MHz加严频段中,也能够满足设计要求。
同时,摄像机也传导敏感度试验(CS101、CS114、CS115、CS116),在这些电磁干扰试验中,摄像机图像稳定,遥测数据正常,均满足GJB151A—97的要求。
5 结语
本文提出了基于空间以太网络视频传输的高清一体摄像机,详细介绍了该系统的硬件设计。系统采用使用TI公司的TMS320DM6467为主要处理核心,完成包括H.264,JPEG2000,MPEG-4等图像编码算法,支持UDP,RTP,TCP/IP等多种网络传输协议。从电源、结构等方面对其进行改进,从而满足航天产品各项技术要求和指标。经过各种试验,该系统视频采集系统成像清晰、可靠,能够很好地完成宇航型号图像系统的需求。
[1] 黄言磊,叶光明.网络摄像机软件架构的研究与设计[J].电视技术,2012,36(23):151-154.
[2] MENDIS S K,KEMENY S E,GEE R C,et al.CMOS active pixel image sensors for highly integrated imaging systems[J].IEEE Solid State Circuits,1997,32:187-197.
[3] 秦臻,曹剑中.基于TMS320DM365的高速网络摄像机的设计[J].电子设计工程,2011,19(10):121-124.
[4] 范铁道,田雁,曹剑中,等.基于FPGA的CMOS图像感器IA_G3驱动电路的研究[J].电子器件,2009(2):269-273.
[5] Texas Instruments .TMS320DM64x digital media system-on-Chip(DMSoC)video processing front end(VPFE)user’s guide[EB/OL].[2014-12-10].http://focus.ti.com.cn/cn/lit/ug/sprufg8c/sprufg8c.pdf.
[6] 赵勇,袁誉乐,丁锐.DAVINCI技术原理与应用指南[M].南京:东南大学出版社,2008.
袁承宗,工程师,硕士,主研图像处理、数字视频图像编解码算法与传输技术、嵌入式系统开发;
李 贤,研究员,硕士,主研基于嵌入式图像预处理算法技术;
张 震,工程师,硕士,主研数字视频图像编解码算法与传输技术、基于嵌入式的网络协议栈的应用与开发;
叶 盛,高级工程师,硕士,主研基于嵌入式图像预处理算法技术、图像编解码算法;
蔡非凡,工程师,硕士,主研微电子工艺组装。
责任编辑:闫雯雯
Hardware Design of High Definition(HD) Camera Based on Ethernet in Space Area
YUAN Chengzong,LI Xian,ZHANG Zhen,YE Sheng,CAI Feifan
(ShanghaiAerospaceElecetronicTechnologyInstitute,Shanghai201109,China)
A new design of high definition(HD) camera based on Ethernet video transmission which adapts to space environment is proposed in this paper as existing industrial cameras cannot endure the large temperature difference and strong vibration conditions. This camera is able to code images with H.264, JPEG2000 and MPEG4 standards, which also supports aerospace Ethernet protocol for transmission and control. Reliability designs and simulations for structure, mechanical, thermal, and electromagnetic compatibility have been done against environmental requirements for aerospace, to meet high demand for light weight, good temperature adaptability and high reliability. Such designed camera has passed the qualification test and proven feasible for working in space environmen.
aerospace;High Definition(HD);camera;reliability design
【本文献信息】袁承宗,李贤,张震,等.基于以太网络的宇航用高清摄像机的硬件设计[J].电视技术,2015,39(11).
TN948.41
A
10.16280/j.videoe.2015.11.028
2014-12-19