隧道车辆检测方法的研究
2015-10-08李聪
李聪

【摘 要】目前信息技术的迅速发展为车辆的检测研究提供了许多便利,使其已经成为我国交通信息检测研究的热点问题,而对于隧道车辆及时准确的进行检测,对其有关信息进行有效使用,将相关指令发给隧道照明控制系统,进而达到“车近灯亮、车过灯灭”的理想效果。这将有效解决我国隧道照明系统中普遍存在能源消耗严重的问题,达到节约能源的良好效果。本文系统介绍了常用检测算法像帧差法,光流法,背景差分法的原理,分析并比较了各种算法的适用范围与优缺点,为不同场合下车辆检测算法的选择提供了重要的参考依据,有效提高车辆检测效果。
【关键词】隧道车辆;检测算法;节能
【Abstract】Currently the rapid development of information technology for the detection of vehicle provides many advantages,whic has become a hot issue in our country traffic information detection, and in order to the timely and accurate vehicle tunnels detection, effective use of the relevant information, the relevant instructions issued to the tunnel lighting control system, achieving the result of "closer to the car lights, car lights" . This will effectively solve the problem of energy consumption in tunnel lighting system, and achieve the good effect of energy saving.. This paper introduces the commonly used detection algorithms like frame difference method, optical flow method, background difference method principle, analysis and compare the scope of application of the various algorithms and the advantages and disadvantages, provides an important reference for the choice of vehicle detection algorithm under different occasions, effectively improve the vehicle detection effect.
【Key words】Tunnel vehicle; Detection algorithm; Energy conservation
0 引言
现代工业的迅猛发展使得越来越多的人有能力享受更加便利的交通工具,私家车已经成为常见的代步工具,走进全家万户。车辆的增加,自然而然的导致所需的能源急剧增加,这使得建设资源节约型,环境友好型社会目标的任务更加沉重。能源消耗所造成的环境问题及后果正制约着人类社会的可持续发展,走生态文明发展道路正被国际社会所认同和重视。党的十八大政府工作报告明确指出:到2020年我国的资源节约型、环境型社会建设要取得重大进展,单位国内生产总值能源消耗和二氧化碳排放大幅下降,主要污染物排放总量明显减少[1]。
在可持续化发展的大背景下,作为最主要运输方式之一的公路运输必然要承担更大的压力。交通灯这一公路运输方式的主要耗能体,逐渐吸引了一大批优秀学者的眼球。我国地势复杂多样,隧道照明所需的能源巨大,隧道中普遍存在着“黑洞”和“白洞”,如陕西西汉高速公路隧道全年照明电费接近2300万元[2]。如果促使交通灯照明能随着车辆的有无而变化,必将带来显著的经济和环境效益。本文正是基于这一目的,进行隧道车辆的有效检测,引导隧道交通灯亮度变化,达到“车近灯亮、车过灯灭”的理想效果,到达减少照明消耗的目的。
1 隧道车辆检测存在的问题
虽然车辆检测的研究已经经历了几十年的世界,但是到目前为止,没有哪一种检测方法是完美无缺的,针对不同的问题,不同的工作环境,工作人员提出了各种各样的算法,但是局限性都比较大,通用算法并不存在,面对现在诸多新的应用,目前的算法已经无法在实时性、鲁棒性、精度和自主性等方面满足现在生产、生活的需求。到目前为止,仍不能很好解决的突出问题主要变现在下面的几个方面。
(1)速度过快或者过慢问题。速度是车辆运动的重要参数,它的快慢与否直接影响着对运动车辆的检测效果,速度过快,对信号的采集相当的少,造成目标图像的失帧;相反,速度过慢,容易将目标与背景混为一体,无法有效对车辆运行情况进行检测。运动过程是否存在往返现象也关系到检测结果的准确性。
(2)背景变化问题。在大多数情况下,检测背景是经常变化的,像光照变化,摄像机的震荡等情况都会引起背景变化问题。光照的剧变会对图像采集造成很大的困扰,尤其是对于那些在静态背景下的目标采集。光照的改变,引起背景采集信号的变化,使得采集车辆信号中混有背景信号,造成极大的采集误差。此外,值得注意的是,在光照条件下,运动车辆常常有阴影存在,车辆的移动会伴有阴影的移动,使得系统将阴影也作为检测目标进行统计分析,检测结果主要有两种形式:一是阴影作为检测车辆的一部分出现,造成检测车辆失真;二是阴影和检测车辆分开,作为独立的目标存在,这就直接导致了统计信息的不准确,造成了不必要的虚假信息。显然背景改变后,要想采集到准确的目标信息,就需要对其进行实时更新,这就会大大增加了车辆检测的难度。
(3)车辆相互遮挡问题。对于隧道车辆检测,最大的问题就是车辆遮挡问题,大型车辆遮挡小型目标,造成采集中的盲区,在采集过程中无法捕捉到小型目标的信号,只检测到一部分有效图像信息,而运动车辆的前方遮挡车辆可能会作为检测目标被提取出来,使得检测结果不准确。
(4)另外还有灰尘过大问题,突然飞来的树叶,纸张,车窗玻璃的反光等等,这些都会对隧道车辆的检测造成或多或少的影响。
2 隧道车辆检测常见算法分析
通过对常见的车辆检测算法进行分析,得出各种算法的使用领域和优缺点,为以后目标检测算法在新形势下可能的改进方向和适用领域提供必要的分析依据。
2.1 光流法
光流法就是通过统计运动目标在图像位置上的瞬时速度变化来进行检测分析的。光流法具有良好的适用性,没有动态背景和静态背景的差异,它对背景没有严格的要求,不需要知道场景的任何信息,就可以比较准确的检测出各种单一的运动目标,并且可以了解到运动车辆的速度情况。相对于比较突出的优点,光流法的缺点也比较的明显,计算量大,鲁棒性差,反映速度过慢,难以满足实时性的要求极大限制了光流法是适应范围。在现在的实时检测跟踪系统中,光流法因为没有特殊硬件的支持,很难满足实时性检测的要求,尚且没有得到广泛的应用,但是它仍然是未来非常重要的一个研究方向和发展趋势[3]。
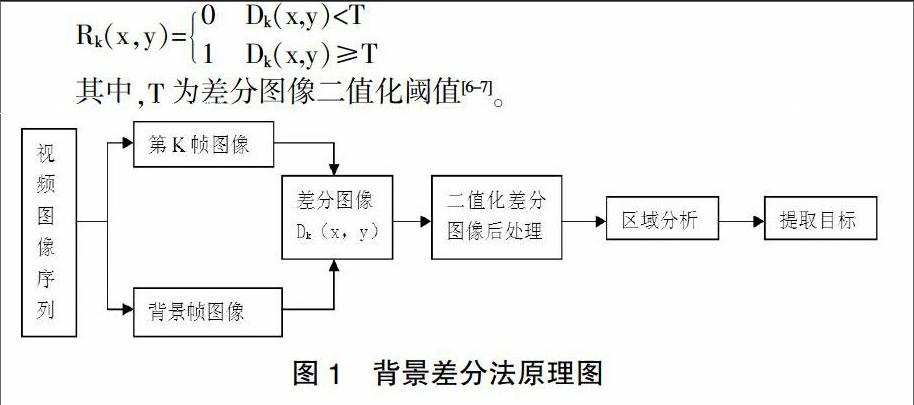
2.2 背景差分法
作为隧道车辆检测方法中最常用的算法之一,背景差分法计算方法比较简单,实时性也比较强,在静态背景下,利用当前图像和背景图像的差分检测出运动目标区域的一种技术[4-5]。它的基本思想:将背景图像定义为ak目标图像定义为fk(x,y)。(x,y)为图像坐标。当前帧图像和背景 帧图像的差分图像就可表示为:
Dk(x,y)=| fk(x,y)-bk(x,y)|
经二值化处理后可得二值化差分图像Rk(x,y),即:
Rk(x,y)=0 Dk(x,y) 其中,T为差分图像二值化阈值[6-7]。 图像质量的好坏取决于阈值量的合理选择,如果阈值选择的太高,运动区域就会产生严重的碎化现象,相反,阈值选择太低,则会产生大量的噪声,影响图像处理效果[8-9]。背景差分法具有明显的优点,它计算量比较小,易于实现,能够满足实时性的要求,提取出比较完整的目标信息。但是算法只能在静态背景下适用,对外界信息的变化比较敏感,像光照变化,外物干扰条件下的背景变化等等,该算法极易产生阴影现象。 2.3 帧间差分法 帧间差分法是对帧间图像进行运动分析的一种方法,主要分为相邻两帧图像和相邻数帧图像之间的差分这两种。该算法主要依据相邻图像间具有强相关性的特点,把相邻图像中两帧或者多帧进行相减,用来消除背景或者是其他静止的物体,达到对车辆进行实时检测的目的。帧间差分法适用于动态环境中,其基本原理是:首先计算出差分Dk,也就是计算出第K帧图像与K-△K(△K≥1)帧图像之间的差分,即Dk(x,y)=|fk(x,y)-fk-△K(x,y)|, fk(x,y)和fk-△K(x,y)分别为前后两帧图像,Dk(x,y)为帧间差分图像。 Rk(x,y)=0 Dk(x,y) 其中T味差分图像二值化阈值,Rk(x,y )是经过二值化等差分图像处理程序得到的二值化图像。其处理方法是如果前后两帧图像的灰度值没有变化,则取值为0,如果前后两帧的灰度值发生变化,则取值为1,代表变化区域。 帧间差分法原理简单,易于计算,速度比较快,比较容易实现实时监控,此外它对场景光照的缓慢变化不敏感,目标阴影对其的影响也比较小,是适用范围比较广的算法。然而如果运动目标的运行速度比较缓慢时,相邻两帧图像就好出现重叠现象,该算法就仅能检测出图像中相对运动的部分,导致目标检测失败,此外,如果检测车辆的灰度比较均匀的话,相邻帧差可能在目标重叠部分形成很大的空洞,严重时就会产生分割结果不连通的后果,不利于对目标图像的分析与研究。显而易见,帧间差分法局限性也比较大,在没有任何经验的前提下,它极易错判目标。但是帧间差分法通常是其他复杂算法的检验基础,并且常常用来与其他复杂算法结合,弥补彼此的不足,提高目标的检测效果。 3 结束语 本文对隧道背景下运动车辆的常用检测算法进行了认真分析。对光流法、背景差分法和帧差法这三种常用经典算法的基本原理、优势与缺陷进行了系统的分析。为将来灵活使用这些算法,提高车辆检测效果打下坚实基础。 【参考文献】 [1]十八大报告全文[Z]. [2]涂耘,王少飞,张琦,等.西汉高速公路隧道照明系统评估研究[J].2010,21(5):15-21,36. [3]孙承志.基于DSP的运动目标自动检测跟踪系统的研究[D].南京:河海大学,2006. [4]林雯.新型基于帧间差分法的运动人脸检测算法研究[J].计算机仿真,2010,10:238-241. [5]李泽峰,朱凌云.基于改进背景差分的运动目标检测[J].仪表技术,2004(1):34-36. [6]张晖,董宇宁.基于视频的车辆检测算法综述[J].南京邮电大学学报:自然科学版,2007,27(3):88-94. [7]郝志成,朱明.智能目标检测与跟踪系统的设计与实现[J].光电工程,2007,16(2):32-37. [8]杨超华.基于LABVIEW和MATLAB混合编程技术的视频运动目标检测与跟踪方法研究[D].南京:南京理工大学,2013:78-79. [9]夏青华.模糊图像车辆与车牌识别算法的研究和实现[D].南京:南京邮电大学,2011:26-34. [责任编辑:汤静]
