气动加载在多体动力学中的实现
2015-10-08刘军
刘军
【摘 要】飞机在飞行的不同阶段,机翼受到的气动载荷在随时发生变化,机翼上的活动面由于空间姿态变化大,载荷的变化尤其剧烈,如何在多体动力学模型中精确模拟气动载荷,一直是困扰飞机设计人员的一个很大的问题,利用多体动力学仿真软件中的编程语言,编制了活动面气动加载程序,极大的提高了气动载荷模拟精度和建模效率。
【关键词】机翼活动面;气动加载;多体动力学
0 前言
虚拟样机技术起源于对多体系统动力学的研究。20世纪60年代,古典的刚体力学、分析力学与计算机技术相结合的力学分支——多体系统动力学产生了,其主要任务是:
1)建立复杂机械系统运动学和动力学程序化的数学模型,开发实现这个数学模型的软件系统。
2)实现有效的处理数学模型的计算方法与数值积分方法。
3)实现有效的数据后台处理,采用动画显示、图表或其它方式提供数据处理结果。
经过30多年的发展,多体系统动力学已经比较完善。多体系统动力学包括多刚体系统动力学和多柔体系统动力学。多刚体系统动力学已发展出多种较为成熟的方法,如牛顿—欧拉方法将刚体在空间的一般运动分解为随其上某点的平动和绕此点的转动,分别用牛顿定律和欧拉方程处理;拉格朗日方法则从系统的观点出发,建立混合的微分—代数方程组;在多体系统动力学理论框架已经搭起,相应的数学方法业已提出后,数位学者走出了象牙塔,力图把研究成果商品化,使其能为工业界接受,开发了多种多体动力学软件。
1 载荷分析
襟翼、缝翼和副翼在飞机飞行过程中承受气动力,并且由于飞行状态的不同,气动力的大小和方向也发生变化。襟翼、缝翼、副翼的气动力大小随着飞行状态不同发生变化,并且气动力总的作用点也发生变化,所以不能像一般刚性体加载力值时只在某点加载一个变化的力值即可,而需要根据襟翼和缝翼姿态的不同对作用点以及力值大小进行不同加载。
2 载荷表达
以外襟翼为例,对柔性体外襟翼气动力加载进行说明。
确定外襟翼在巡航状态、起飞状态、复飞状态、着陆状态下气动力的压心坐标位置,共四处;
在四个压心处对外襟翼分别加载四个气动力,采用全局坐标系。
在巡航状态下,只有巡航状态的压心承受气动力,其他三处气动力无力值。同样,在起飞状态下,只有起飞状态的压心承受气动力。在巡航状态运动到起飞状态过程中,需要将气动总力值大小和位置从巡航状态的压心转移到起飞状态的压心位置。
刚体模型中采用总力值乘以STEP函数的形式进行转变,
STEP:该函数格式格式为Step(x,x0,y0,x1,y1),表示用一个三次多项式构造一个阶跃函数。其中,x为独立变量,x0为起始点,y0为起始点处的函数值,x1为终止点,y1为终止点处的函数值,
TIME:返回当前的仿真时间,可在函数中用作独立变量。
为了真实的仿真活动面各个部件运动和受力状态,必须对每个部件的运动和受力进行时序控制。本项目根据需要仿真共进行7秒,每一时刻的状态如下:
0-1秒:活动面各部件及机翼受巡航状态下的气动力,各个机构保持巡航下状态,各个部件达到平衡状态;
1-3秒:活动面各部件由巡航状态运动到起飞状态,气动力由巡航状态转变为起飞状态;
3-3.5秒:活动面各部件保持起飞状态0.5秒时间;
3.5-4.5秒:活动面各部件由起飞状态运动到复飞状态,气动力由起飞状态转变为复飞状态;
4.5-5秒:活动面各部件保持复飞状态0.5秒时间;
5-6.5秒:活动面各部件由复飞状态运动到着陆状态,气动力由复飞状态转变为着陆状态;
6.5-7秒:活动面各部件保持着陆状态0.5秒时间。
调用以上step和time函数,即可将力值函数表达如下:
巡航状态压心的力值函数为:F*step(time,1,1,3,0),
起飞状态压心的力值函数为:F*step(time,1,0,3,step(time,3.5,1,5,0))
3 载荷施加
以外襟翼为例,详述气动力在活动面刚柔耦合多体动力学模型上的施加:
1)由活动面刚性体动力学模型运动得到外襟翼在巡航、起飞、复飞和着陆的状态,输出为STL格式文件,这几种状态对应的是外襟翼在巡航状态、起飞状态、复飞状态和着陆状态下的位置和姿态;
2)根据不同状态下的STL模型,将外襟翼有限元模型定位到相应状态下;
3)在对应状态下的外襟翼,输入气动力施加的站位点,并以站位点作为从节点,在其周围结构寻找若干个主节点建立rbe3单元;
4)在每个站位点施加相应的气动力进行计算,输出外襟翼巡航、起飞、复飞和着陆状态每个rbe3单元主节点X、Y、Z三个方向上的力值;
5)整理载荷,将所有主节点的力值整理到Excel中,应用自编程序,得到rbe3对主节点的作用力值;
6)将外襟翼巡航、起飞、复飞和着陆每个主节点上的每个方向力值整理到Excel中,将力值对应的节点在地面状态下的坐标也整理到相应的位置。应用自编程序,建立多体模型中的力值加载节点、力值插值曲线、加载气动力、气动力输出等多体模型语言;
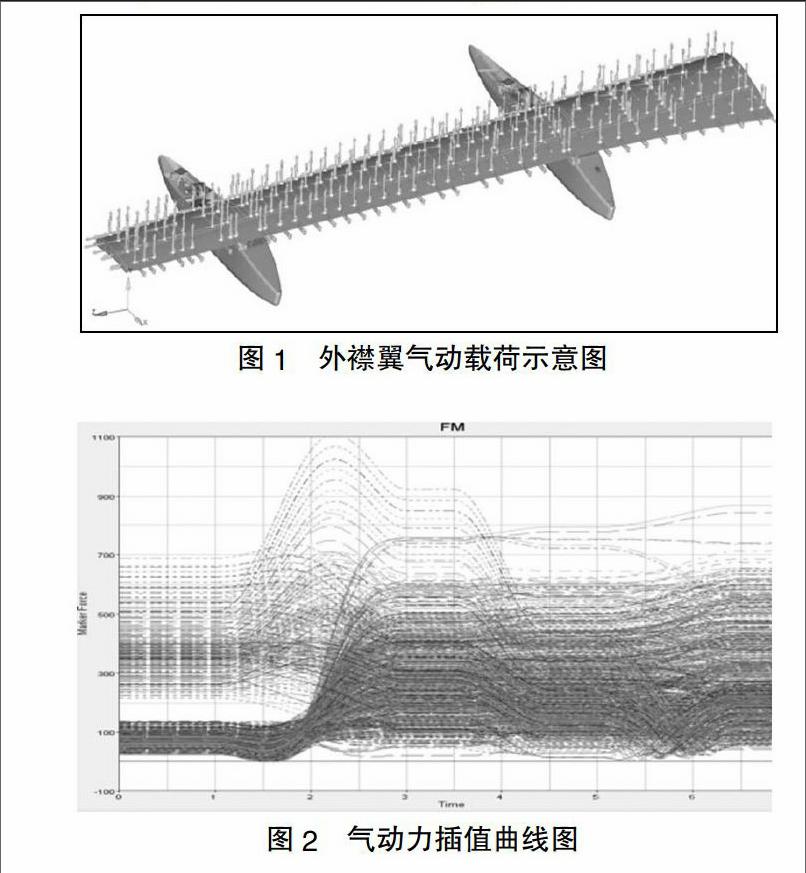
7)在多体模型中,将上步所生成的节点、曲线、力值和输出等语言增加到模型中,所生成的节点在柔性体外襟翼匹配相应节点,即可实现在柔性外襟翼上施加三个方向的动态载荷。下图1是加载了气动力的外襟翼多体模型,下图2是气动力插值曲线图。
4 结论
本文探索了飞机机翼活动面气动载荷的精确模拟方法,并通过利用多体动力学软件的编程语言编制了气动载荷在多体动力学模型中的快速加载,对于活动面多体动力学仿真分析有重要意义。在此过程中形成的技术路线和流程方法,可以为后续机翼活动面动力学分析提供经验和规范,有助于提高产品设计水平,缩短产品研发周期。
【参考文献】
[1]MotionView Users Manual[Z].
[2]洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,2002.
[责任编辑:汤静]
