多轮起落架的数字化建模及其动态性能仿真
2015-10-08杨尚新
杨尚新


【摘 要】在笛卡尔坐标系中建立了飞机起落架着陆过程的等效数学模型;基于ADAMS/Aircraft模块建立了多轮式起落架的着陆动态性能分析模型并完成全机数字样机的装配。对仿真结果进行研究分析,得出结论:多轮式起落架能够有效地分散地面载荷,大大地减小起落架单个机轮承受的压力,增大飞机的漂浮性,提高飞机起飞着陆的安全性,并在一定程度上延长起落架及跑道的使用寿命。该研究内容及方法为今后的大飞机起落架设计提供有益的参考。
【关键词】多轮起落架;数字建模;动态响应
【Abstract】It established an equivalent mathematical model of Landing gear in Descartes Coordinate System .The digital prototypes of the Landing gear and full-aircraft with multi-wheels were established based on MSC ADAMS/Aircraft software. Via research and analysis of the simulation results, it draws conclusions that Landing gear with multi-wheels can scatter ground load and decrease burden on single wheel efficiently. As a result, the floatation and security of aircraft will be improved greatly. Also the life of Landing gear and the runway will be prolonged. The beneficial references are provided for the design of large aircraft in the future.
【Key words】Landing gear with multi-wheels; Digital modeling; Dynamic response
0 引言
随着航空工业的发展,重型飞机起落架的主起落架,面临着两个必须解决的问题,一是机场跑道的强度满足不了重型飞机的着陆要求:由于飞机重量的增加,机轮载荷相应成倍地增加,导致跑道道面应力很高,严重情况下会使道面开裂、变粗糙和形成波形,加快结构疲劳和轮胎磨损,导致昂贵的起落架和跑道维修费用;二是机轮直径的增大,给起落架的收藏带来了很大的困难[1]。而采用多轮式起落架能很好地解决这些问题。本文在ADAMS/Aircraft环境下建立四轮车式及六轮(三对双轮串列)[2]式起落架模型并装配全机的虚拟样机,对多轮系飞机起落架进行着陆动态性能仿真,通过对二者的仿真结果对比分析,得出在一定的重量范围内,六轮式较传统的四轮式起落架的优势所在,定量地说明了多轮式起落架在解决上述问题方面的效果。
1 飞机着陆等效模型的建立
1.1 坐标系的选取
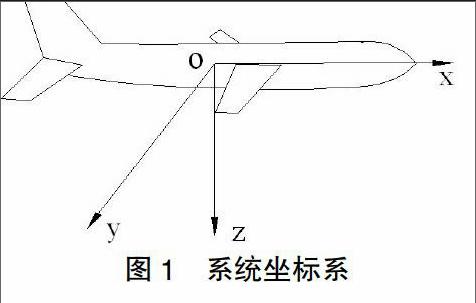
飞行动力学的坐标系通常是右手笛卡尔坐标系,本文采用国际标准化组织(ISO)规定的“前X右Y下Z”体系(如图1所示)。即沿飞机纵轴航向的方向为X轴的正方向,垂直于X轴沿翼展指向右翼方向为Y轴的正方向,竖直向下为Z轴的正方向。在此坐标系的基础上建立起落架的动力学模型。
1.2 起落架简化模型
为了使建立的模型便于计算,同时又能较准确地反映真实起落架的受力情况,本文亦采用二质量理论[3]建立如图2所示的等效模型。图中根据起落架结构中各部分的运动特点,把系统划分为:弹簧支承质量(空气弹簧所支承的质量,包括机身、机翼、缓冲器外筒等,即ma)和非弹簧支承质量(包括缓冲器活塞杆、刹车装置、机轮及车架等,即mb)。
如图2中模型所示,支柱力通常可表示为:
F1=Fa+Fh+Ff
其中,Fa为空气弹簧力,Fh为油液阻尼力,Ff为摩擦力。另外,缓冲器正反行程摩擦力可以按照缓冲器总轴向力的5%来计算[4]。
在气体等温压缩的理想条件下,图中支柱和轮胎模型可简化为一个质量-弹簧-阻尼系统来描述[5-6],所受的力分别为
ADAMS/Aircraft模块是ADAMS软件[9]的一个扩展模块,是在各种测试条件下建立起落架和全机模型的一个专用平台,提供了优越的起落架建模环境:标准模板和模板生成器。在这个平台上可以建立起落架和全机的数字虚拟样机,精确模拟物理样机进行实验分析。
2.1 虚拟样机模板的建立
ADAMS/Aircraft模块中的样机模型都是以模板为基础的,然后通过调用模板来生成子系统,最后由子系统来装配生成全机的数字化模型。所以各子系统模板的建立是最为关键、重要的一步。其建立方法主要有两种:
(1)直接打开软件自带的标准模板,通过修改其中各个部分的参数来生成符合实验要求的新模板。
(2)利用模板生成器从定义最基本的硬点(hardpoints)开始逐步生成最终的样机模板。
利用模板生成器建立起落架模板的基本步骤(图3)如下:
(1)进入模板生成器,定义环境变量,创建硬点(hardpoints)。
(2)根据需要利用点或坐标创建结构框架(construction frame),construction frame实质上是地面上的标记点,带有方向。可用于部件的定位,特别是在最后建立输入、输出通信器的时候必不可少。
(3)创建各个组成部件。这个过程包括创建部件(part)及其几何外形(geometry)并定义缓冲系统的属性等。注意,由于ADAMS/Aircraft开始创建的部件不包含几何外形,所以二者要分开来建立。
(4)给各个部件添加连接约束。
(5)创建用来在模板之间互相传递信息的输入/输出通信器(communicator),对各模板通信器进行测试,确定通信器正确无误后即完成模板的建立。
以上为起落架模板建立的一般步骤,轮胎和机身模板的建立相对简单一些,定义好若干点、结构框架及通信器等之后,直接调入属性文件即可生成。
2.2 模型子系统的建立
样机的各部件模板建立完成之后,打开ADAMS/Aircraft的标准界面窗口,可通过调入上面建立的模板直接生成各子系统。本文建立了普通双轮前起落架子系统,以及四轮车式和六轮(三对双轮串列)式两种主起落架子系统(如图4所示)。
由于机身的样机形状不影响仿真结果,所以本文直接调用了模板机身,定义其质量、惯矩、重心位置等参数,然后通过修改轮胎文件的参数分别创建了机身子系统及前、主起轮胎子系统。
2.3 全机数字样机模型的建立
将上面建立好的各子系统正确装配起来即完成多轮飞机的全机数字模型的建立。本文最后装配完成的全机数字样机模型如图5所示。
3 全机着陆仿真与分析
在ADAMS/Aircraft标准界面环境下装配好全机着陆模型后按表1所列参数进行仿真分析。
假设飞机两点对称着陆,仿真结果如图6~图10所示。
仿真结果分析:
(1)在着陆碰撞后,六轮式主起飞机的水平航向速度明显比四轮式主起飞机的减小的快,能在一定程度上缩短着陆滑跑距离。
(2)两种主起落架缓冲系统吸收的着陆功量相当,但六轮式主起飞机单个机轮对地面的压力要比四轮式小30%左右,极大地降低了机轮对跑道单位面积的压力,从而减小起落架及跑道的的维修费用,延长了起落架及跑道的使用寿命。同时提高了飞机的漂浮性能,增强了飞机起飞着陆的安全性。
(3)起落架缓冲器功量图比较饱满,说明起落架在第一次缓冲行程中吸收了绝大部分能量,另外飞机在着陆碰撞后重心高度逐渐趋于平稳,地面对机轮作用力的变化亦与轮胎压缩情况一致。以上情况均与实际的物理样机实验结果变化趋势吻合,所以可证明所建立的模型是可靠的。
4 结论
(1)与增加支柱相比,增加机轮后的六轮主起落架系统,既能有效地分散路面载荷、减小单个机轮的受力,又能使飞机有不超过三个主起落架支柱,大大地降低了起落架系统及操纵机构的复杂性。
(2)ADAMS/Aircraft模块能够快速准确地建立起落架系统模型及全机模型,并且能够实时进行动态性能仿真,可靠度高,较之周期长、费用高的物理样机实验有无可替代的优势。随着计算机技术的不断发展,现代CAD/CAE相结合的设计、实验一体化技术必将成为今后工业设计的主流设计手段。
【参考文献】
[1]航空航天工业部科学技术委员会.飞机起落架强度设计指南[M].成都:四川科学技术出版社, 1989:672-683.
[2]诺曼·斯·柯里.飞机起落架设计原理和实践[M].北京:航空工业出版社,1990:1-7.
[3]吕祥生,聂宏.基于MCS算法的飞机起落架仿真研究[J].计算机仿真,2007,24(1):55-57.
[4]王惟栋,任志勇.多支柱起落架停机载荷仿真分析[J].飞机工程,2006,3:19-21.
[5]袁东.飞机起落架仿真数学模型建立方法[J].飞行力学, 2002,20(4):44-47.
[6]Howlett J.J. UH-60A Black Hawk Engineering Simulation Program[R].NASA-CR-166309,1981.
[7]Mechanical Dynamics Inc, Road Map to ADAMS/Aircraft Documentation[Z]. ADAMS12.0 help, 2002
[8]Mechanical Dynamics Inc, Road Map to ADAMS/View Documentation[Z]. ADAMS12.0 help, 2002
[9]李军,邢俊文,覃文洁,等.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
[责任编辑:曹明明]
