Mean Shift算法在运动目标检测与跟踪中的研究
2015-09-28李国强陈蒲阳
李国强,陈蒲阳
(桂林电子科技大学,桂林 541004)
Mean Shift算法在运动目标检测与跟踪中的研究
李国强,陈蒲阳
(桂林电子科技大学,桂林541004)
0 引言
随着经济的不断发展,人民生活水平的迅猛提高,现代社会对安防的要求越来越高。这也给智能监控和身份识别技术带来了巨大的发展机遇和挑战。在许多场合,如人口密集区的检测,银行、证券交易所等重要场所的安防,仅仅只是对运动的物体感兴趣,所有运动目标的检测与跟踪目前已经成为了应用视觉领域一个重要的研究方向,具有重大的实用价值和广阔的发展前景。而随着多媒体技术的飞速发展与计算机性能的提高与集成化工艺的提升,基于图像处理的智能监控技术得到了广泛应用。运动目标的检测与跟踪是一切智能场景分析与监控的基础核心,而运动的人体目标是一个特殊的目标群体,更是运动目标检测跟踪领域中一个典型的研究对象。
目前一般的运动目标检测方法有:帧间差分法、背景差分法、光流法;跟踪算法主要有基于特征、区域、活动轮廓、模型的跟踪算法;基于背景差分与卡尔曼滤波的跟踪方法[1];为了解决复杂场景中行人跟踪的问题,需要我们设计出越来越多的鲁棒算法,使其足以解决光照变化、噪声影响、障碍物遮挡等种种实际应用中不可避免的问题。
运动目标检测与跟踪的目的就是确定当前帧图像中的运动目标在下一帧图像中的位置,在跟踪过程中最大的问题就是当运动目标相互遮挡时目标信息容易丢失从而导致跟踪失败。针对此种固定场景的情况,目前卡尔曼滤波以及基于卡尔曼滤波的目标跟踪算法已经在各个领域得到广泛应用,但是卡尔曼滤波有一定的限制条件,首先需要系统为精确的数学模型,并且要假设系统为线性,噪声信号为高斯噪声,且噪声统计特性已知,然而,在实际应用中,系统状态为高动态情况下,将会不可避免地产生较大的噪声误差,导致状态预测不准确,环境与使用条件的复杂多变,系统噪声以及观察噪声统计特性的不确定性,也会导致卡尔曼滤波器性能下降。
Mean Shift是一种鲁棒的特征空间分析方法,基于此算法的目标跟踪具有易于实现、实时、鲁棒等特点,因此本文将Mean Shift算法作为主要理论基础,与目标区域灰度直方图结合,进行运动目标的检测跟踪。运动目标检测和跟踪的流程在摄像头固定的情况下对运动行人检测跟踪的系统框图如图1所示。
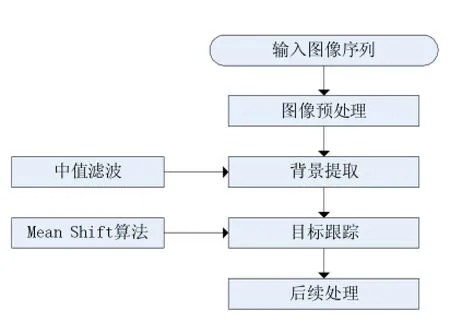
图1 运动目标检测和跟踪的步骤
算法设计主要有两个模块:
(1)基于中值滤波来提取背景图像。采用中值滤波器可以有效地去除图像的噪声。检测运动物体之前需要提取无运动目标的背景图像,而视频的连续帧图像中一般都包含有运动物体,因此首先需要提取背景。
(2)基于Mean Shift算法的行人跟踪。由于在早期的滤波跟踪理论中,都是事先假定目标的运动和观察方程都是线性的,系统状态的后验密度符合高斯分布,所以基于时间序列的卡尔曼滤波被广泛应用,然后在实际中由于摄像机抖动、光照变化、图像的噪声等因素的影响,假设条件就不成立了,因此采用Mean Shift梯度下降算法来求解代价函数的局部极值点来实现帧间特征的对应匹配,以此来完成运动行人的跟踪[1]。
1 背景提取
一般情况下中值滤波器可以有效地去除图像的噪声。它的算法为:计算灰度图像中的每一个像素,然后将它和与相邻的八个像素的灰度排序,排在中间的像素灰度作为输出图像像素的灰度值。具体就是先将彩色图像转换成灰度图像,把在中间的像素对应的原始彩色图像的像素矢量作为滤波结果。
将彩色像素矢量Fi(x,y)转换成灰度Gi(x,y),将像素按照像素值大小进行排序,生成单调的二维数据序列。假设排在中间的是Gk(x,y)则将此像素对应的彩色像素矢量Fk(x,y)作为滤波处理后图像。实现中值滤波彩色背景的提取。
本实验在主频为2.8GHz Intel Pentium G640处理器的PC上运行,软件平台为MATLAB R2013a,视频采用数据堂网站的用于前景处理的一段视频。
实验结果表明,此方法可以较好地提取背景图像,通过把灰度中值滤波图像处理提取背景,扩展到RGB图像空间,可以有效地消除噪声信号,较好地完成后续运动目标的跟踪,图像处理结果如图2所示。

图2 背景图像
2 目标跟踪
1975年,Fukunaga等人在一篇关于概率密度梯度函数的估计中最先提出Mean Shift这个概念的,起初它仅仅是指偏移的均值向量,通过不断反复迭代直到满足一定条件而结束,但是随着理论的进一步发展,Mean Shift的含义也发生了改变,在1995年,Yizong Cheng发表了一篇对均值漂移算法里程碑意义的文章[3]。文章对基本的算法做出了两方面的改进。首先定义了一组核函数,随着被偏移点与样本的距离不同,而偏移量对均值偏移向量的贡献也不同,另外还设定了一个权重系数,使不同样本点的重要性也不一样,另外Yizong Cheng还指出了Mean Shift可能应用的了领域,因此本文采用基于Mean Shift算法实现运动行人目标的检测与跟踪。
Mean Shift跟踪算法本质上是一种梯度下降算法,从空间任意点出发,沿着核密度梯度上升的方向,以自适应的步长进行搜索,直到得到收敛于核密度估计函数的局部最大值,算法运算量相对较少,可以满足实时性的要求[4]。
基本Mean Shift:
在给定的d维空间Rd中的n个样本点xi,i=1,…,n,x点的Mean Shift向量可以定义为:
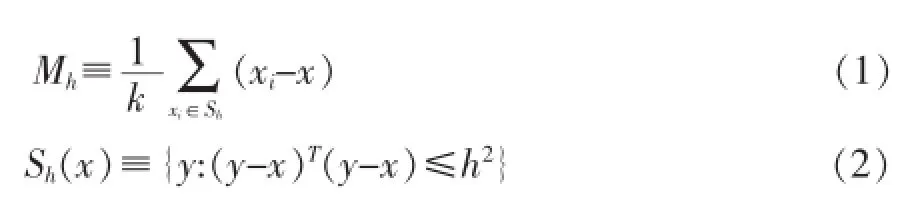
其中,k表示在n个样本点xi中,有k个点落入Sh区域中。Sh是半径为h的高维球区域,满足式(2)关系的y点的集合。
Mean Shift向量Mh(x)就是在对落入区域Sh的k个样本点相对于点x的偏移向量(xi-x)求和然后再平均。从表面上看,如果样本点xi是从一个概率密度中采样得到,那么由于非零的概率密度梯度指向概率密度增加最大的方向,所以Sh区域内的样本点更多的落在沿着概率密度梯度的方向。因此,对应的 Mean Shift向量Mh(x)应该指向概率密度梯度的方向。
Mean Shift算法采用颜色直方图对所选的目标区域进行建模,然后计算特征空间中各个特征值的概率来建立目标模型,给定d维空间Rd中的n个样本点xi,i=1,…,n,那么在x点的密度估计可以表示为[4]:

其中:函数b是R2→{1…m}是位于xi的像素向灰度索引的映像,δ(x)是delat函数,C是归一化系数。
对目标函数引入核估计,则概率密度函数可以表示为:

其中:k(x)为核函数的轮廓。
图像中可能包含目标的区域,称为候选区,该区域中的像素用{xi}i=1…n表示,则候选区域的特征值u=1…m的概率密度为:

其中Ch是标准化的常量系数。
在本文跟踪算法中,我们选取Bhattacharyya系数作为相似性函数,其定义为:

相似性函数用来度量目标模型和当前模型的相似性,数值在0~1之间,ρ值越大,表明两个模型越相似[5]。
目标从初始位置,开始寻找最优位置,最可能出现的位置,即是ρ最大的候选区域,由于Mean Shift算法的收敛性,不断迭代搜索出Bhattacharyya系数的最大值,最终会收敛到目标的真实位置,从而实现目标的跟踪。
算法步骤如下[6]:选择搜索窗口,然后计算窗口的重心,将此窗口的中心设置在计算出的重心处,不断迭代计算,直到窗口的位置不再发生改变。
3 实验结果及分析
现通过一个视频对Mean Shift算法跟踪实验结果进行分析。视频采用数据堂网站的用于前景处理的一段视频。
首先,在一个三岔路口行走的行人,不存在障碍物遮挡时,RGB颜色模型下,基于 Visual Studio 2010和OpenCV 2.4.4中对本算法进行仿真实验,结果如图3所示。
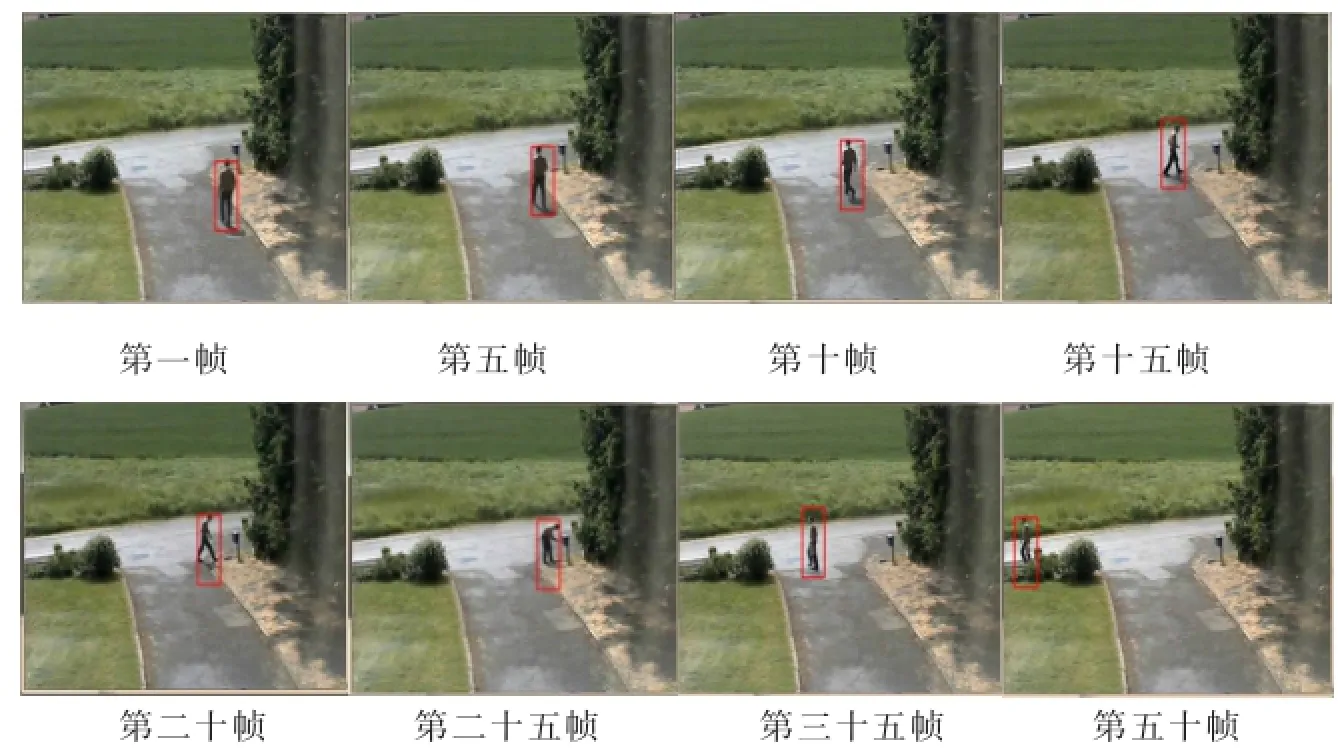
图3 目标跟踪结果序列
从实验结果可以看出,没有遮挡物存在的条件下,与目标区域灰度直方图结合的Mean Shift算法,进行运动目标的检测跟踪效果明显要优于基于卡尔曼滤波的传统跟踪方法,这就可以说明此种算法可以更好地检测与跟踪目标。
4 结语
本文介绍并重点研究了Mean Shift跟踪算法,本质是自适应的梯度上升搜索峰值的方法,通过均值漂移来实时搜索的候选区域,在摄像头固定的情况下,可以很好地检测和跟踪运动中的行人目标。背景提取采用从灰度图像扩展到RGB图像中的中值滤波算法;运动跟踪采用基于Mean Shift与目标区域灰度直方图结合运动跟踪算法。它们的鲁棒性和实时性都符合实际运用的要求。
采用的是在摄像头固定下的运动行人作为实验场景,可以运用到小区监控、银行监控、校园监控,等等,然而如何在摄像头移动、背景复杂、多行人情况下实现目标的检测与跟踪,以及在背景图像不断更新,光照条件复杂变化过程中的目标检测与跟踪都是可以进一步研究的方向。
[1]王亚亮.基于最优贝叶斯估计的目标识别与跟踪研究[D].北京:北京交通大学硕士学位论文,2013
[2]来磊.基于室内的人体目标识别与跟踪关键技术研究[D].上海:东华大学硕士学位论文,2010
[3]CHENG Y.Mean Shift,Mode Seeking,and Clustering[J].IEEE Transon Pattern Analysis and Machine Intelligence,1995,17(08): 790~799
[4]李格.视频序列中的人体检测与跟踪技术研究[D].武汉:武汉理工大学硕士学位论文,2012
[5]赵欣,陈峰,吴立知.一种改进的Meanshift运动目标跟踪算法[J].通信技术,2011,11(44):76
[6]赵艳启.运动目标识别与跟踪算法的研究[D].南京:河海大学硕士学位论文,2005
Target Detection;Motion Tracking;Mean Shift;Image Processing
Research on the Mean Shift Algorithm in the Moving Target Detection and Tracking
LI Guo-qiang,CHEN Pu-yang
(Guilin University of Electronic Technology,Guilin 541004)
1007-1423(2015)08-0038-04
10.3969/j.issn.1007-1423.2015.08.009
李国强(1989-),男,山西吕梁人,硕士研究生,研究方向为图像处理与模式识别、控制工程与系统
2015-01-27
2015-02-11
运动行人的检测与跟踪技术已经成为智能视频监控中的关键性技术,是计算机视觉领域研究的一个重要领域。传统的视频监控技术应用虽然广泛,但是智能性不足、应用效率较低。针对摄像头固定情况下的运动行人跟踪进行研究,引入一种应用效果较好的Mean Shift算法,与目标区域灰度直方图结合,进行运动目标的检测跟踪,在Visual Studio 2010和OpenCV 2.4.4中对本算法进行仿真,从仿真结果中得出系统可以较好地实现对运动行人的检测与跟踪。
目标检测;运动跟踪;Mean Shift;图像处理
陈蒲阳(1965-),男,湖南祁东人,硕士,硕士生导师,研究员,研究方向为控制工程与系统
Motion pedestrian detection and tracking technology has become crucial in intelligent video surveillance technology,is an important area of research in computer vision.Although the traditional video surveillance technology are widely used,but less intelligent,less application efficiency.Aims at the tracking study of the movement of pedestrians in case of a fixed camera,introduces a better application of Mean Shift algorithm,combined with target area gray histogram,moving target detection and tracking,the simulation results obtained from the Visual Studio 2010 and OpenCV 2.4.4 can achieve better movement of pedestrian detection and tracking.