静态推靠式旋转导向控制方案分析及优化
2015-09-26李士斌王业强张立刚徐月庆东北石油大学石油工程学院黑龙江大庆6338大庆钻井工程技术研究院黑龙江大庆6338
李士斌 王业强 张立刚 徐月庆(.东北石油大学石油工程学院,黑龙江大庆 6338;.大庆钻井工程技术研究院,黑龙江大庆 6338)
静态推靠式旋转导向控制方案分析及优化
李士斌1王业强1张立刚1徐月庆2
(1.东北石油大学石油工程学院,黑龙江大庆163318;2.大庆钻井工程技术研究院,黑龙江大庆163318)
旋转导向钻井技术已经成为当前钻井必不可少的核心技术,主要根据静态推靠式旋转导向控制原理,结合工程实际要求,建立力学模型。根据有利区内支撑爪力最大、不利区内支撑爪力最小原则,提出120°和60°划分区域的2种控制方案,在优化数学模型的基础上,分别将各支撑爪的应力分解到偏置合力的方向和垂直于偏置合力的方向,采用力学矢量分析法,建立不同偏置合力矢量下的力学方程,求解相应的方程,得出不同划分区域下各支撑爪的应力表达式。分析对比不同划分区域下各支撑爪应力变化,比较变化趋势,优选更为稳定的控制方案,从而增加仪器使用寿命,减少钻井事故,降低成本。
旋转导向钻井;推靠式旋转导向;控制方案;变化趋势
旋转导向钻井技术使得钻进速度和钻井质量得到大幅度的提升,国外对旋转导向技术的研究比较成熟,其中已经商业化应用的旋转导向钻具中,其控制方案、导向方式和整体结构各不相同,然而国内对旋转导向系统的研究仍处于初级阶段,目前阶段对推靠式工作方式研究较多。基于静态推靠式旋转导向工作原理,针对静态推靠式旋转导向工具工作时,目标导向力的不同、支撑爪位置的不同等因素,对静态推靠式旋转导向控制方案展开分析优化。导向工具工作时的控制目标是导向合力幅值和大小,采用矢量分析法对偏置合力矢量进行合成与分解,但考虑到数学求解时的多解性和边界性定义复杂等问题,划分了目标导向力的有利区和不利区,提出了120°区域划分和60°区域划分2种控制方案。
1 静态推靠式旋转导向控制系统工作原理
静态推靠式旋转导向工具的控制平面内包括3个彼此间隔120°分布的支撑爪,导向系统中的安装有测量工具可以测得支撑爪1相对于高边方向的位置,图1中偏置合力即是控制目标,当系统下达控制指令时,井下微处理器按照预定控制算法计算出各支撑爪力,通过液压推动支撑爪支出,同时获得井壁对支撑爪的反向推力(文中称为支撑爪力)[1-2]。其控制平面内示意图如图1所示。
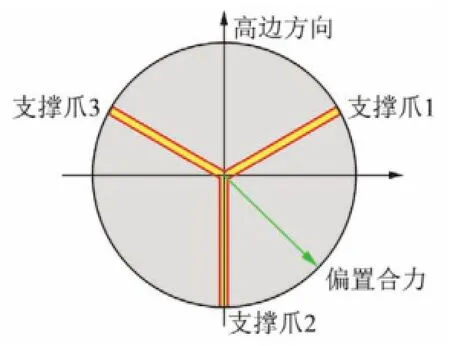
图1 控制平面内结构分布
2 数学模型分析优化
考虑到液压推动能力的限制和工程应用中三支撑爪均伸出工作时更为稳定,规定每个支撑爪应力最大为Fmax,最小为Fmin,由文献[3]可知360°可控的最大偏置合力为由于工具在工作时外套是旋转的,支撑爪1相对于高边的位置α1是在不断变化的,因此在建立数学模型的分析过程中,若以高边为基准线,按照测定的α1( 高边顺时针转到爪1的角度)和目标合力角度αk( 高边顺时针转到偏置合力方向的角度)建立方程,需要考虑α1、αk各处于不同位置的情况,需要建立的方程非常多,求解较为复杂,因此数学模型建立中需要以爪1位置α1为基准线,通过比较偏置合力和支撑爪1相对位置αk变化来求解控制方案,如图2所示。
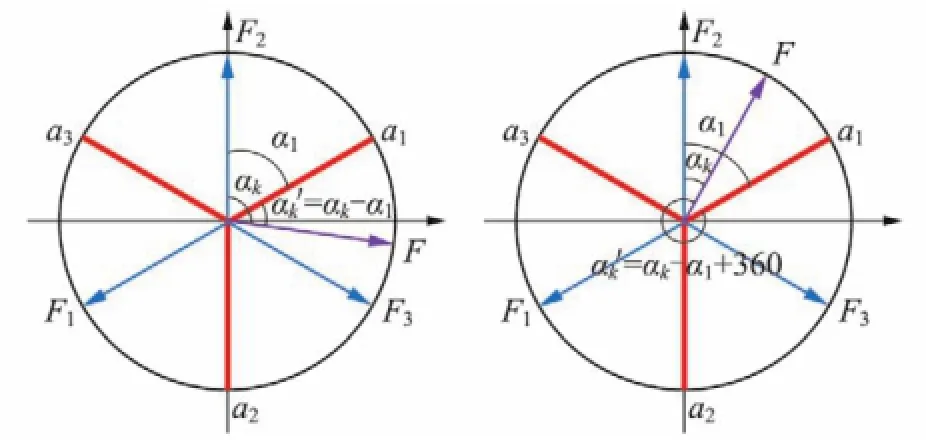
图2 α1为基准线模型图
3 控制方案分析
当导向合力F处于已划分好的某一区域时,分别将F1、F2、F3向合力F方向分解为F1x、F2x、F3x和垂直于F方向分解为F1y、F2y、F3y,再运用力学矢量法建立方程组。
3.1120°区域划分
由于三支撑爪间彼此间隔为120°,若将整个控制平面分为3个区块,随着目标导向力矢量F的变化,则必有一个力处于目标导向力的不利区内取最小值,如图3。
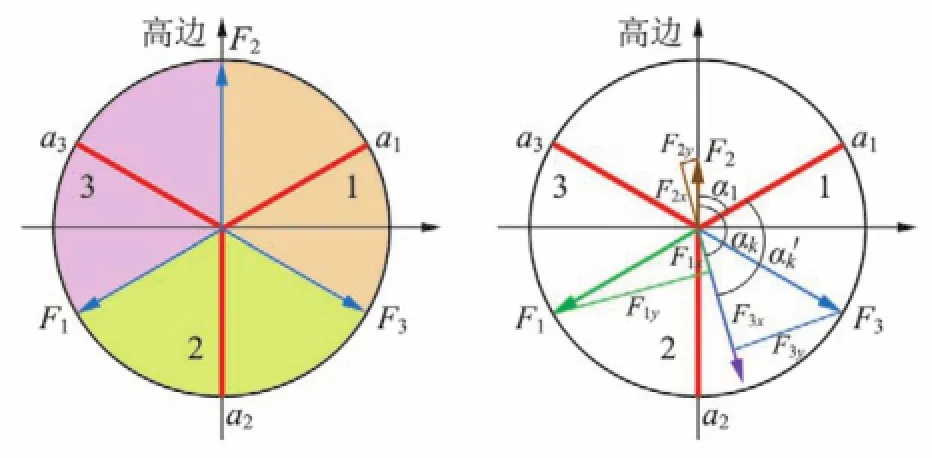
图3 120°划分区域模型
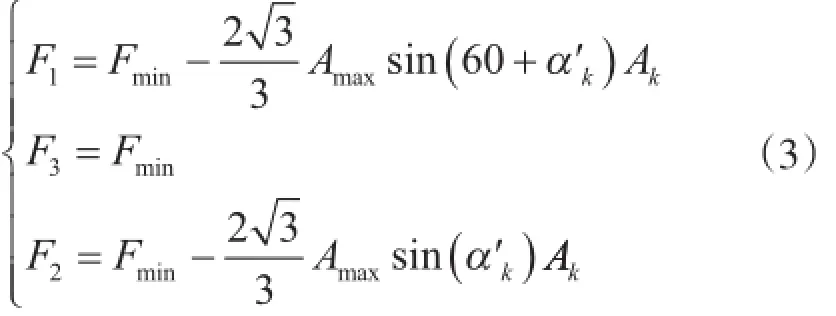
(1)当导向合力F处于区域1时,即αk'≥300°或αk'≤60°,那么F1就处于不利区,此时爪1对应的F1取最小值Fmin,按矢量分析法建立方程组后,解得
(2)当导向合力处于区域2时,即60°≤αk'≤180°,F2处于不利区,此时爪2对应的F2取最小值Fmin,解得

(3)当导向合力处于区域3时,即180°≤αk' ≤300°,F3处于不利区,此时爪3对应的F3取最小值Fmin,解得
3.260°区域划分
若将整个控制平面分为6个区域,随着目标导向力矢量F的变化,则必有一个力处于有利区取最大值或处于不利区取最小值,如图4所示。
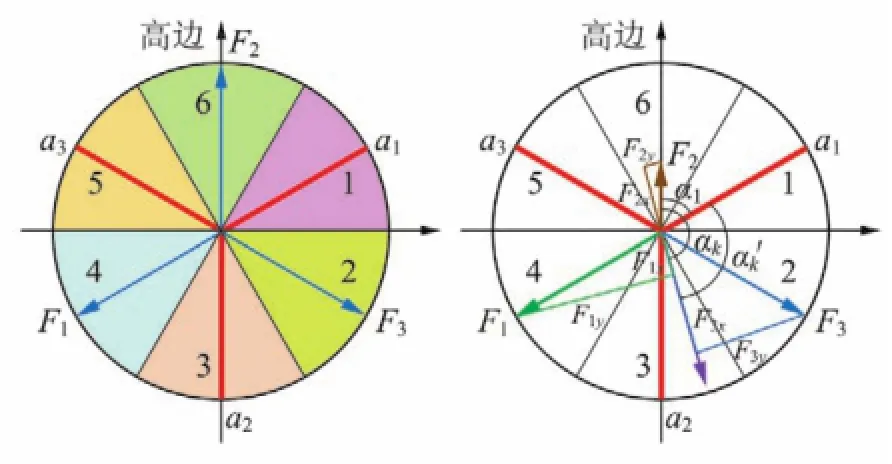
图4 60°划分区域模型
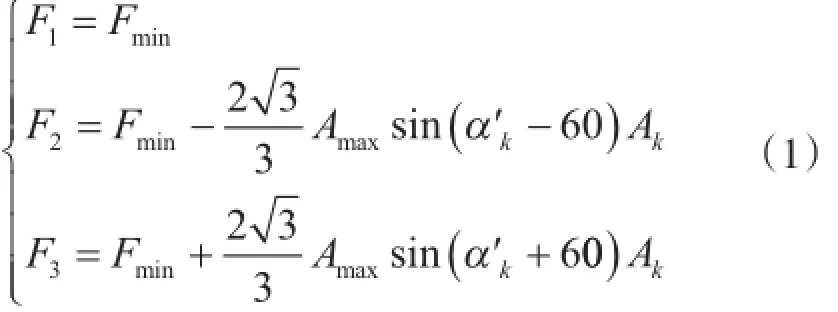
(1)当导向合力F处于区域1时,即αk'≥330°或αk' ≤30°时,那么F1就处于不利区,此时爪1对应的F1取最小值Fmin,按矢量分析法建立方程组后,解得
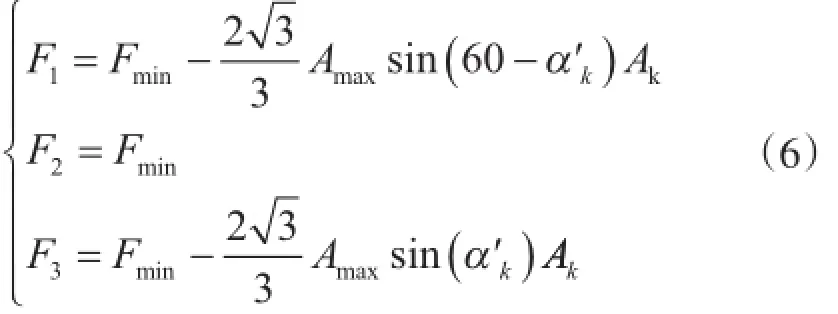
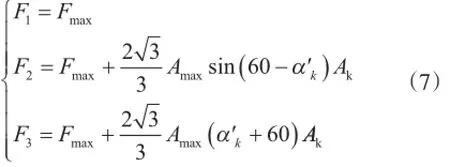
(2)当导向合力F处于区域2时,即30°≤αk' ≤90°时,那么F3就处于有利区,此时爪3对应的F3取最大值Fmax,按矢量分析法建立方程组后,解得
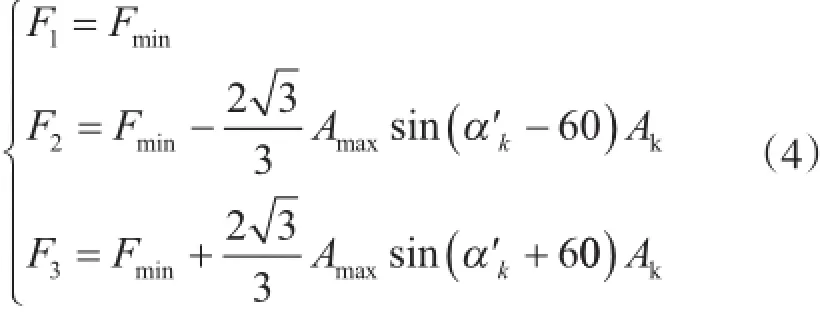
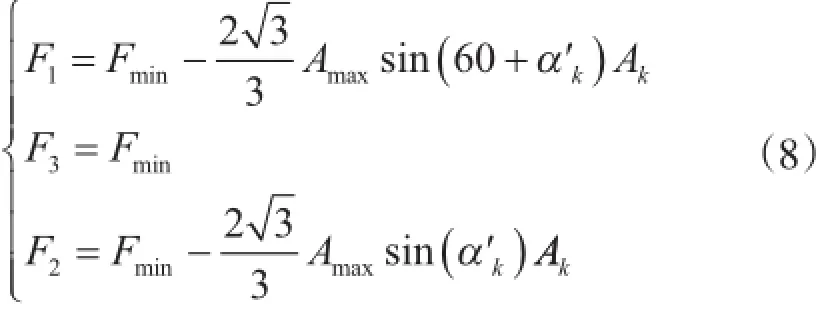
(3)当导向合力F处于区域3时,即90°≤αk' ≤150°时,,那么F2就处于不利区,此时爪2对应的F2取最小值Fmin,按矢量分析法建立方程组后,解得
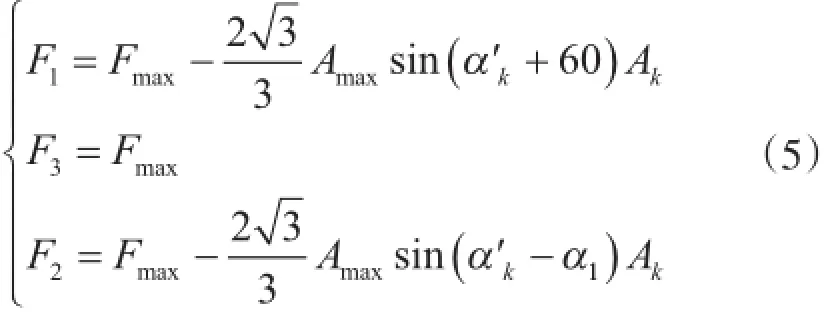
(4)当导向合力F处于区域4时,即当150°≤αk'≤210°时,那么F1就处于有利区,此时爪1对应的F1取最大值Fmax,按矢量分析法建立方程组后,解得
(5)当导向合力F处于区域5?时,即210°≤α'k≤270°时,那么F3就处于不利区,此时爪3对应的F3取最小值Fmin,按矢量分析法建立方程组后,解得
(6)当导向合力F处于区域6时,即270°≤αk' ≤330°时,那么F2就处于有利区,此时爪2对应的F2取最大值Fmax,按矢量分析法建立方程组后,解得
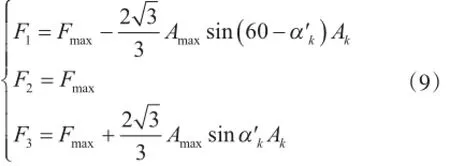
式中,α1为高边方向顺时针旋转到爪1位置的角度,°;αk为高边方向顺时针旋转到偏置合力方向的角度,°;αk' 为爪1位置顺时针旋转到偏置合力的角度,°;F1,F2,F3分别为三支撑爪的应力,kN;Fmax为最大液压力,kN;Fmin为最小液压力,kN;Amax为360°可控偏置合力,kN;Ak为工作效率,%。
式(1)~(3)为120°划分区域内,不同的偏置合力矢量对应的各支撑爪的应力大小。式(4)~(9)为60°划分区域内,不同的偏置合力矢量对应的各支撑爪的应力大小。
4 分析控制方案的趋势变化
定义Ak=100%,Fmax=20, Fmin=0.7, α1=30°时,随着偏置合力角αk的变化,120°区域划分下,各支撑爪的支撑力(F1,F2,F3)的变化趋势如图5所示,60°划分区域下各支撑爪应力变化趋势如图6所示。
由图5和图6可知,120°划分区域只考虑当合力矢量处于不利区时,不利区内的支撑爪取最小值,但是并没有限制有利区内的支撑爪的应力为最大,从而在最大值处产生较为明显的波动变化;而60°划分区域内同时限制了有利区内的支撑爪应力最大,不利区内的支撑爪应力最小,随着偏置合力矢量的变化,各支撑爪应力皆平稳变化,减小了钻具的震荡波动,降低了井下事故风险。
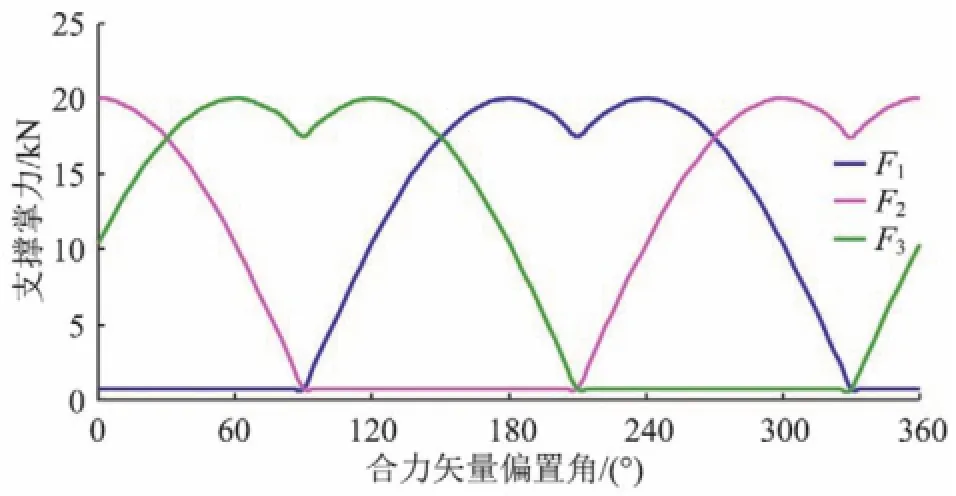
图5 120°划分区域应力变化趋势
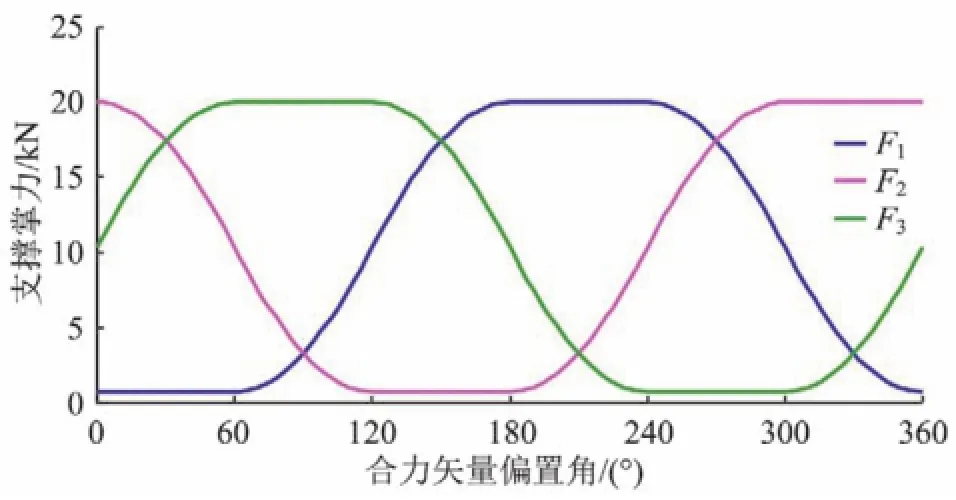
图6 60°划分区域应力变化趋势
5 旋转导向控制示意图
如图7,静态推靠式旋转导向在实际应用时是按照预定的轨迹信息,将目标导向力传给井下处理器,井下处理器通过按照已定的控制方案计算出各支撑爪应力大小,并通过井下处理器传送给控制阀,再传达给各支撑爪,各支撑爪按计算出的控制方案支出,使工具受到井壁的反向支撑力,从而使钻头按目标方向进行钻进,钻进的同时井下随钻监控系统将测得的井斜角、方位角、工具面角以及爪1当前相对高边位置和地质状况通过井下传感器传达到地面监控系统,地面工作人员通过对监控数据的分析,确定下一次工作方案的调整[4-6]。
6 结论
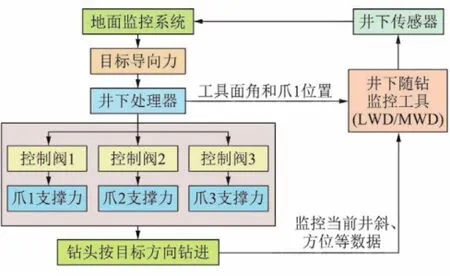
图7 旋转导向控制系统示意图
(1)当目标导向力方向一定时,根据旋转导向控制平面内三支撑爪结构,把整个平面分为3个区块,控制平面内存在对导向力的不利区,得到120°划分区域控制方案,把整个平面分为6个区块,控制平面内同时存在对导向力的不利区和有利区,得到60°划分区域控制方案。
(2)考虑到边界性问题和简化方程数量,数学模型的建立过程中以爪1位置为基准线,通过比较目标合力与爪1的相对位置的变化,求解控制方案。
(3)根据2种控制方案下各支撑爪应力表达式,作出支撑爪应力变化趋势图,得出120°划分区域下的各支撑爪应力在偏置合力角的某一变化区间会有明显波动,而60°划分区域下的在同一区间各支撑爪应力变化平稳,控制时相对稳定,更适合井下复杂工作环境,减少钻进风险,增大工具使用寿命。
(4)给出了整个旋转导向控制系统工作示意图,表述了其具体工作步骤,为现场工作人员及今后科研人员提供清晰直观的理解。
[1]闫文辉,彭勇.旋转导向钻井工具导向执行机构设计[J].天然气工业,2006,26(11):70-72.
[2]杨剑锋,张绍槐.旋转导向闭环钻井系统[J].石油钻采工艺,2003,25(1):1-5.
[3]杜建生,刘宝林,夏柏如.静态推靠式旋转导向系统三支撑掌偏置机构控制方案[J].石油钻采工艺,2008,30(6):5-10.
[4]汪海阁,王灵碧,纪国栋,等.国内外钻完井技术新进展[J].石油钻采工艺,2013,35(5):1-12.
[5]雷静,杨甘生,梁涛,等.国内外旋转导向钻井系统导向原理[J].探矿工程:岩土钻掘工程,2012(9):53-58.
[6]江波,李晓军,程召江,等.一种静止推靠式旋转导向钻井系统的设计方案[J].石油钻采工艺,2015,37(3):19-22.
(修改稿收到日期2015-06-16)
〔编辑薛改珍〕
Analysis and optimization of static push-the-bit rotary steering control scheme
LI Shibin1, WANG Yeqiang1, ZHANG Ligang1, XU Yueqing2
(1. Petroleum Engineering College, Northeast Petroleum University, Daqing 163318, China; 2. Daqing Drilling Engineering and Technology Research Institute, Daqing 163318, China)
The rotary steering drilling technique has become an indispensable core technology in the present drilling operations. In this paper, a mechanical model was built according to the principle of static push-the-bit rotary steering control and in conjunction with the actual need of drilling engineering. According to the principle of maximum supporting claw force in the favorable area and minimum supporting claw force in the unfavorable force, this paper presents two control schemes: dividing the area by 120° and 60°. While optimizing the mathematical model, the stress on each supporting claw is decomposed to the bias resultant force direction and to the direction perpendicular to the bias resultant force. Using mechanics vector analytic method, a mechanic equation is built under different bias resultant vector, and then solves the related equation to find the stress expressions of each supporting claw at different areas. This paper analyzes the stress changes of each supporting claw at different areas, compares the changing trend and optimizes the more steady control scheme so as to increase the service life of the instruments, reduce drilling accidents and reduce drilling costs.
rotary steering drilling; push-the-bit rotary steering; control scheme; change trend
TP13;TE928
A
1000 – 7393( 2015 ) 04 – 0012 – 04
10.13639/j.odpt.2015.04.004
国家自然科学基金项目”基于应力-渗流-损伤多场耦合的清水压裂机理及储层筛选研究”(编号:51274069);东北石油大学青年自然科学基金“致密砂岩储层体积压裂应力场改造控制机理研究”(编号:NEPUQN2014-26)。
李士斌,1965年生。2006年获大庆石油学院油气井工程专业博士学位,主要从事油气井压裂理论和技术领域的研究工作,教授,博士生导师。E-mail:lishibin_2001@sina.com。
引用格式:李士斌,王业强,张立刚,等.静态推靠式旋转导向控制方案分析及优化[J].石油钻采工艺,2015,37(4): 12-15.
