某皮卡选换挡操纵装置人机工程设计理论及应用
2015-09-23喻少高安徽江淮汽车股份有限公司安徽合肥230601
喻少高(安徽江淮汽车股份有限公司,安徽 合肥 230601)
某皮卡选换挡操纵装置人机工程设计理论及应用
喻少高
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
文章通过汽车人机工程理论与我公司设计开发的皮卡选换挡操纵座相结合阐述了选换挡操纵装置设计在人机工程方面的应用与实践,以完善选换挡操纵装置人机工程方面的设计思路。
选换挡操纵装置;人机工程
10.16638/j.cnki.1671-7988.2015.12.014
CLC NO.: U463.8Document Code: AArticle ID: 1671-7988(2015)12-35-05
引言
人机工程学是一门研究和应用范围都极为广泛的综合性边缘学科,是技术科学、解剖学、心理学、人类学等学科的交叉。国际人类工效学学会(International Ergonomics Association,lEA)对它的定义是:人因工程学是研究人在某种工作环境中的解剖学、生理学和心理学等方面的各种因素;研究人和机器及环境的相互作用;研究在工作、家庭生活中和休假是怎样统一考虑工作效率、人的健康、安全和舒适等问题的学科[1]。
人机工程学是以人——机——环境作为基本的研究对象,通过揭示人、机、环境之间相互关系的规律,已确保人——机——环境系统达到最优化的总体性能。
人机工程学的内容具体包括几个方面:
(1)研究内容
人体特性的研究研究的主要内容包括人体形态特征参数、感知特性、反应特性以及在劳动中人的心理特征和人为差错等。
(2)人机系统的整体设计
人机系统设计的目的就是为了使整个系统工作性能最优化,这就必须解决机器与人体相适应的问题,即如何合理地分配人机功能,二者的配合以及有效地交流信息等。
(3)研究人与机器间信息传递装置和工作场所的设计
人与机器之间的信息传递包括显示器向人传递信息,控制器则接收人发出的信息两个方面。其中,显示器的研究包括视觉显示器、听觉显示器以及触觉显示器等各种类型显示器的设计,同时还要研究显示器的布置和组合等问题;控制器设计则要研究各种操作装置的形状、大小、位置以及作用力等在人体解剖学、生物力学和心理学方面的问题。
(4)环境控制和人身安全装置的设计
为了克服不利的环境因素,需要设计一系列环境控制装置来保障人身安全。其中安全保障技术包括机器的安全本质化、防护装置、保险装置、防止人为失误装置、事故控制方法,救援方法等。
1、车辆人机工程学
人机工程学在车辆设计中的应用现已有专门的一门学科,车辆人机工程学,她就是将人机工程学的理论、方法应用于车辆工程领域,通过“人—车—环境”系统的人机工程学研究,提高驾乘人员的舒适性、安全性和工作效率,使系统的总体性能达到最佳匹配状态的学科。
车辆人机工程学的研究内容大致包括以下几个方面:
(1)车辆驾驶操作系统人机界面的优化设计。驾驶操纵系统人机界面设计的是否合理,对驾乘人员在驾乘过程中的安全性、舒适性、身心健康以及工作效率等方面,都有着重大的影响。
(2)车辆乘员的安全保护技术研究。提高车辆的安全性能,降低安全事故的发生率,包括两方面内容:一方面通过研究各种预防报警系统,防止事故的发生,另一方面需要利用有效的车内乘员保护技术来避免或减轻乘员可能遭受的伤害。
(3)车辆乘员的乘坐舒适性。乘坐舒适性主要取决于座椅与人体的人机界面能否为人提供舒适而稳定的坐姿,驾驶员—座椅—车辆系统能否有效地隔离或衰减来自路面不平度的激励而产生的振动,驾驶员—座椅—驾驶室系统的几何位置关系能否为驾驶员提供良好的视野和相对于各种操纵装置与显示装置的舒适位置。
(4)车辆的噪声控制。车辆噪声控制的目的是要保证车内驾乘人员的耳旁噪声满足人的听力保护允许标准,车外噪声满足动态环境噪声允许标准。
(5)车辆内部小气候坏境的宜人化控制。对车内小气候环境的宜人化控制的具体要求标准因车辆的类型,使用条件和运行环境的不同而异,其科学依据是人的热舒适性评价标准。
(6)车辆驾驶员的驾驶适宜性。所谓驾驶适宜性是指人具备圆满、不出差错的完成驾驶工作的素质。开展驾驶适宜性研究并制订科学的驾驶适宜性检查方法,对于驾驶员的选拔和科学化管理具有重要的指导意义。
(7)车辆的道路交通适应性。在设计车辆的性能时,既要充分考虑人的因素,又要充分考虑现在及将来的道路交通特性,如道路的等级、通行能力、管制等级等车—路关系的问题,从驾驶员的角度出发评价车辆对道路交通条件的适应性,使车辆的设计与交通设施的调整相互协调。
(8)人—车—路系统的综合优化。综合运用了人机工程学、汽车工程学、交通工程学、计算机仿真技术、图形图像技术和数据库技术的基本理论的“人—车—路一体化设计”概念将是未来几年摆在各个领域的科技工作者面前的共同课题。
随着车辆使用者群体特性的变化,车辆设计与制造技术的进步,道路交通环境的改善以及社会大环境的变化,车辆人机工程学面临的研究课题必将不断发生变化。
2、 选换挡操纵座的人机工程设计
选换挡操纵座的人机工程设计主要考虑车辆驾驶操作系统人机界面的优化设计、车辆乘员的乘坐舒适性、车辆驾驶员的驾驶适宜性。在实际应用过程中,主要从三个方面设计,一是手把外形,即手握部分的形状和尺寸;二是其操纵行程,包括操纵的角度和位移;三是操纵杆的位置布置。
首先我们通过一个 CATIA的模拟模型做一个选换挡操纵座与人体配合的总体感受。如图1所示。

图1 选换挡操纵座与人体的配合模拟模型
2.1手柄的外形设计
依据手的生理特点来分析和设计操纵杆外形。图 2为手的生理结构,由图可知,就手掌的生理结构来说,掌心部位的肌肉最少,指骨间肌和手指部分是神经末梢满布的部位,指球肌、大鱼际肌和小鱼际肌是肌肉丰富的部位,是手部的天然减震器。因此在设计这类手柄时,要防止手柄形状和振动力方向不能集中于掌心和指骨间肌。如果掌心长期受压受振,可能会引起难以治愈的痉挛,至少易引起疲劳和操作不准确。因此,操作者握住手柄时最好使掌心处略有空隙,使受力减少。

图2 手的生理结构
如图 3,常见操纵杆手柄有圆柱形、锭子形、球形、锥形、梨形等形状。而图3中(b)、(d)、(f)的手柄形状,在执握时,掌心与手柄的贴合面太大,操纵效果不好,只适合作为瞬间和受力不大的操纵手柄。因此优先考虑(a)、(c)、(e)所示的形状。
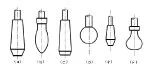
图3 常见操作手柄的形状
具体设计来说,为了减少对掌心部位的压迫可以将操纵杆的端部设计成平面或弧面,这样能使它与掌心留有一定的间隙。又因为操纵杆在操纵过程中,其运动多是前后或左右进行,手握部分可以设计成上部径围稍大于下部径围,这样可以防止操作过程中驾驶员手的滑脱。此外,手握部分不能设计的太光滑,以免操作过程中手的滑动,设计要有一定的纹理,这样可以产生摩擦力,从而防止手滑动。
在实际应用过程中,我公司设计了下图4所示的选换挡手柄,目前应用于皮卡等车型,手柄前方类似于梨形,后方及侧面类似于图 3中(C)所示的直杆结构,主体部分采用PW130617-Z=主皮纹(10°,130μ)的皮纹处理,背部盖板光滑透明。在左右选挡过程中,手掌的大鱼际肌和小鱼际肌作用在手球侧面部位,在向前换 1、3、5、R四个挡位时,手掌的大鱼际肌和小鱼际肌作用在手球后方及侧面部位,在向后换2、4、6挡时,手指的肌接触梨形下方,拉动球头。可见,此球头在使用过程中均能够合理利用手部肌肉完成选换挡,一定的纹理处理也防止了手的滑动。
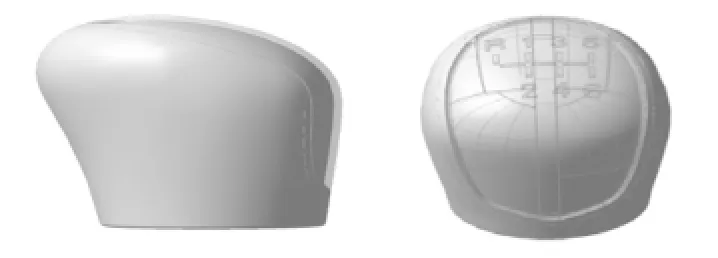
图4 某皮卡选换挡球头形状
操纵杆的长度取决于杠杆比要求和操作频率要求。为了克服大阻力而需要大杠杆比时,操纵杆只能加长。需要高操作频率时,操纵杆只能缩短。操纵杆的粗细一般为 22~32mm,把握手柄的直径一般设计为 32mm,太小会引起肌肉紧张,长期操作产生痉挛和疲劳。
2.2选换挡行程设计
在选换挡操纵座设计过程中,除了要考虑手柄的形状外,还要考虑它的选换挡操纵杆的行程,即操纵角度和操纵位移量。操纵杆的操纵角度和位移量不宜太大,如果太大的话,不仅占用较大的操作空间,而且在进行操作时由于运动消耗量大会使操作者加快疲劳感。所以,操纵杆的操纵角度和位移量应在一个适宜的范围内。操纵杆的操纵角度以30°~60°为宜,一般不超过 90°。操纵杆的位移量随操纵杆的运动方向不同而不同。当操纵杆前后运动时,最大为 350mm;左右运动时,最大为 150mm。角度和位移大小如图5所示。
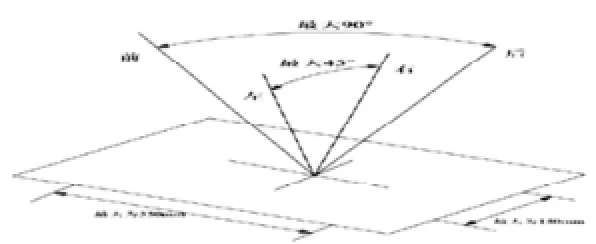
图5 操纵杆的角度及位移
皮卡车型设计角度如图6所示,换挡方向极限角度39°,选挡方向极限角度28.5°。换挡行程目标值如表1,换挡的前后行程最大极限160mm,左右选挡最大极限125mm。

图6 皮卡操纵座操纵角度(换挡39°,选挡28.5°)
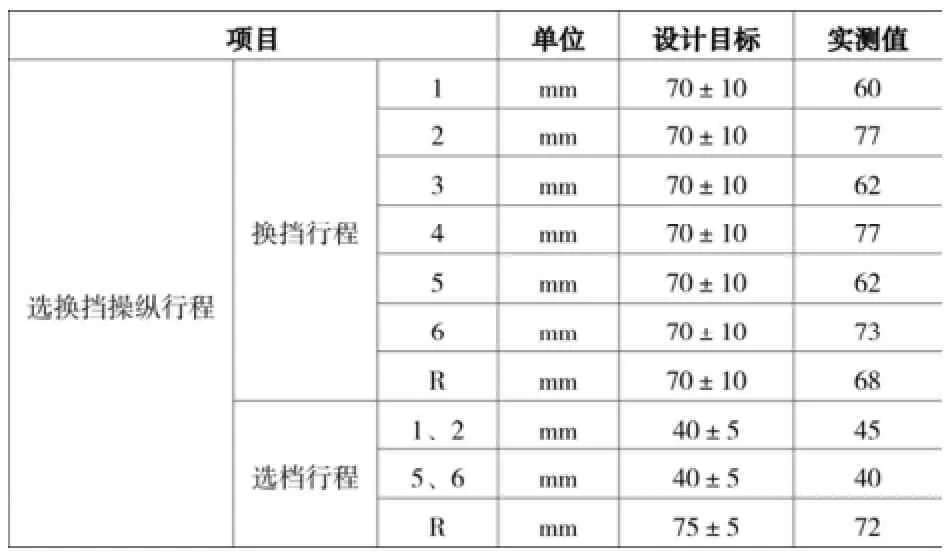
表1 皮卡选换挡行程设计目标及实测值
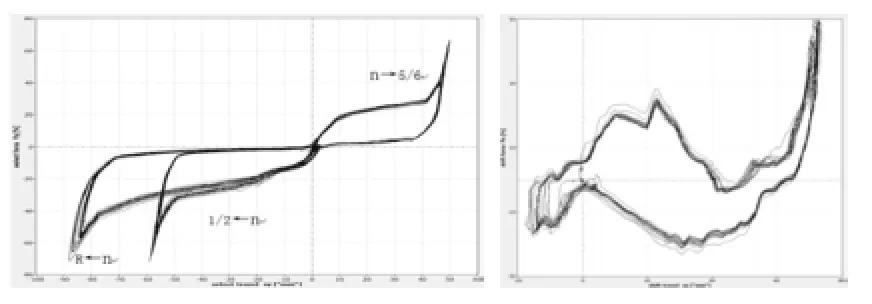
图7 选换挡行程测试实例

图8 选换挡静态间隙及实际行程实例及示意
通过换挡性能测试,实际换挡前后最大值 126,左右选挡最大值69,理论和实际均满足人际工程要求。
2.3选换挡操纵座布置位置选择
2.3.1手伸及界面介绍
驾驶员的手伸及界面是指驾驶员以正常驾驶姿势坐在座椅上,身系安全带,右脚置于加速踏板上,一只手握住转向盘时另一只手所能伸及的最大空间界面。此界面所提供的空间范围,为驾驶员的操纵范围。实验结果表明,驾驶员的手伸及界面是一形如椭球的封闭曲面,因此也称为手伸椭球。不同身材的男女驾驶员的手伸能力不同,对应有不同百分位的手伸及界面。
驾驶室内各种操作钮件的合理布置,是驾驶室设计中的一个重要方面。为了保证驾驶员注意力集中,操作方便、快捷、准确,仪表板及其周围的控制按钮、手柄及开关的位置、空间分布以及仪表和指示、警告灯的辨认识别等都应符合人机工程学的基本要求,必须布置在驾驶员的手伸及界面以内。这样驾驶员才能在不必大幅度改变正常驾驶姿态的情况下方便的操纵这些钮件。这是保证驾乘舒适和行驶安全不可缺少的条件[2]。
2.3.2操纵杆的布置
操纵杆位置的合适与否直接影响驾驶员的操作效率及舒适性。按人机工程学要求,操纵杆应布置在驾驶员只移动手臂而不移动身躯就可操作的范围内。通过CATIA等设计软件我们可以模拟驾驶员手伸空间的模拟,用于确定操纵杆在驾驶员手伸及范围内充分考虑人机工程学原理,使驾驶员在驾驶过程中最低限度的减少操作错误频率,而达到安全驾驶的目的。校核示意如图9、图10所示。
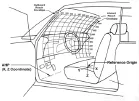
图9

图10
为使驾驶员能有一个较为舒适的控制过程,应尽可能的将操纵杆设置在人能够有较大施力的位置,且便于施力,坐姿状态下手握点应与肘同高。考虑到驾驶员能在小臂正常放置而上臂处于自然悬垂状下舒适地操作,可根据人体手臂的尺寸及驾驶员的舒适作业空间来布置操纵杆。并且上臂与前臂夹角的舒适范围角度为80~165°,操纵杆距H的X方向距离定为:Hx=280mm;操纵杆距H点的Y方向距离定为:Hy=330mm。Hx 和Hy 代表的意义如图11 所示。

图11 操纵杆的布置
在皮卡操纵座设计过程中,对于操纵范围的设计要求,综合国内外汽车行业标准,提出机械式变速杆在任意位置时,均应位于R点在Z平面上的投影,距R点距离≤600mm的区域范围内;变速操纵手柄球头与仪表板最小间隙大于50mm。如图10所示,皮卡操纵座操纵范围有一个半手柄在600mm范围之外,因出于左右置驾驶通用性的考虑,让步接收此设计方案。操纵座最前端与仪表板距离50.8满足要求。

图12 皮卡操纵座位置校核
对于操纵者手柄弯曲角度,参考德国汽车工业协会(VDA)推荐最舒适驾驶员姿态各夹角值,如表2所示。手大臂与竖直夹角约40°,手大臂与小臂夹角约120°基本满足要求。

图13 皮卡驾驶室操纵模拟
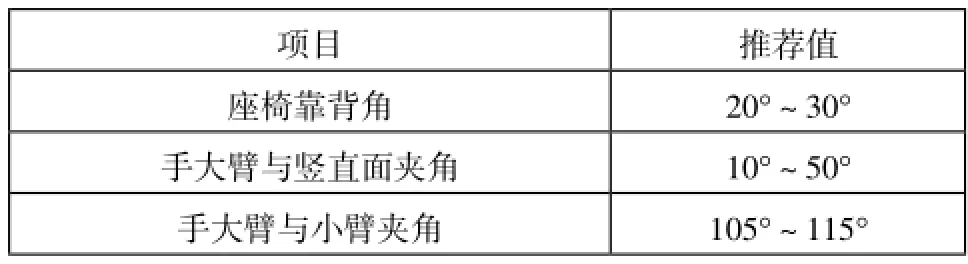
表2 德国汽车工业协会(VDA)推荐最舒适驾驶员姿态各夹角值
2.3.3操作舒适性模拟与评估
根据图14人体舒适坐姿模型以及表3人体各关节舒适角度 的数据,我们可以在CATIA中将人体模型按照这些角度调整,并产生如图15所示的人体舒适状态下的坐姿模型。

图14 人体舒适坐姿模型
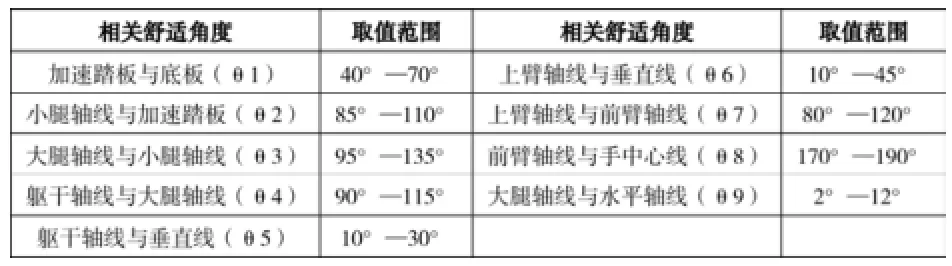
表3 人体各关节舒适角度

图15 人体舒适状态下的坐姿模型
对于操纵舒适性的评估,我们通过人体姿态评估功能模块来分析。通过人体姿态评估得到评估报告,从而对人体模型各部位的姿态进行定量的分析,从而得到关于操纵舒适性的评估报告。
在进行姿态评估前,我们首先要确定人体模型重要部位的首先角度。在 DOF1 方向上,根据坐姿舒适角范围建立人体模型的各个部位的首选角度,先为编辑活动范围划分区域,再为这些区域设立分值,利用人体模型姿态评估工具快速给出人体模型舒适度的评估结果。
以小臂的首选角度建立为例,简单叙述操纵步骤。
首先,由表 3 人体各关节舒适角度 可知小臂和大臂的夹角舒适性角度在 80~120°范围,因此小腿的首选角度为60~100°,如图16(a)中蓝色区域。再将蓝色区域划分为3个区域,因为区域越多,得到的分析结果越精确。其划分结果如图如图16(b)所示。

图16 首选角度设计
然后对各个角度区域进行设计分数值,各分数值如下所示:
0~60设计分值为50分 ;60~70设计分值为 80 分;
70~80设计分值为90分 ;80~100 设计分值为80分;
100~140设计分值为50分。
最后得出输出结果,其评价结果如图17所示。由图可知,该项评分值为94.4 ,符合标准。

图17 姿态评估分析结果图
用同样的方法对人体模型的左上臂、左小腿、左大腿的首选角度进行设定,如图 16所示,右侧部位的首选角度由左侧角度镜像得到。
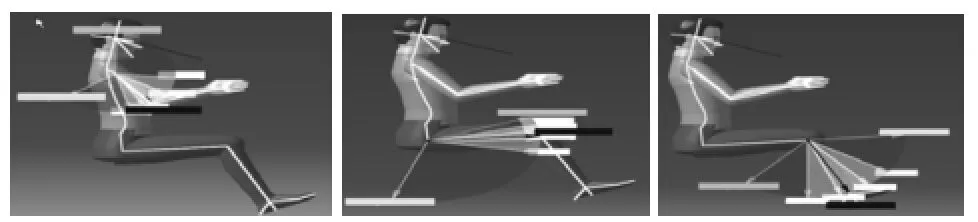
图18 左上臂、左大腿、左小腿的首选角度设定
在设计好首选角度以后,就可以进入姿态的分析阶段,通过人体姿态评估分析工具生成分析报告。图 19 就是在上述首选角度的设计下输出的分析报告。
在皮卡操纵座的设计过程中,我们缺少软件模拟的过程,主要采用主观评价进行评估。评估要求如表4所示。
3、总结
本文通过理论与实践相结合的方式,对选换挡操纵装置所涉及的人机工程理论及皮卡操纵装置设计中的人机工程设计实践进行了分析及阐述。深化了选换挡操纵装置人机工程设计的理论的同时,也找出了我们现在在选换挡操纵装置设计过程中人机工程设计考虑的不足之处,具体如下:
(1)驾驶员手伸空间模拟在选换挡操纵座设计中应用不足,设计之初应全面考虑手伸空间对驾驶的影响;
(2)驾驶员手大臂与竖直面夹角,手大臂与手小臂夹角在设计完成后校核不充分;
(3)人机工程评价措施以主观评价为主,因人而异,设计指标不可控,应研究增加客观评价措施。
[1] 吕杰锋,陈建新,徐进波.人机工程学(高等学校工业设计丛书)[M].北京:清华大学出版社,2009.
[2] 任金东.汽车人机工程学[M].北京:北京大学出版社,2010.
A pickup optional shift control theory of the man-machine engineering design and application
Yu Shaogao
( Anhui Jianghuai Automobile Co., Ltd., Anhui Hefei 230601 )
This paper describes the application and practice of the ergonomicsof the shift controls design in the pikupand the design idea of the ergonomics of the shift controls is developed.
the Shift controls; ergonomics
U463.8
A
1671-7988(2015)12-35-05
喻少高,就职于安徽江淮汽车股份有限公司。
