基于补偿法的预防性静态安全控制
2015-09-21阳育德冯彦维
阳育德,冯彦维,韦 化
(广西大学 广西电力系统最优化与节能技术重点实验室,广西 南宁 530004)
0 引言
电力系统静态安全控制是保证电力系统安全稳定运行的重要措施,控制策略可以为电力系统规划建设和制定运行方式提供指导。其属于安全约束最优潮流[1]SCOPF(Security Constrained Optimal Power Flow)问题的研究范畴,目的是通过对控制变量的优化调整,使得电力系统在基态(正常运行状态,下同)以及事故状态下,满足系统对安全性的要求。SCOPF问题一般是一个同时包含连续和离散变量的非线性、非凸、大规模的优化问题,具体可以分为以下2种类型:(1)预防控制的安全约束最优潮流PSCOPF(Preventive Security Constrained Optimal Power Flow)[1],不考虑预想事故状态下系统的发电再调整,仅通过调整基态的系统控制变量(如发电机有功出力、发电机机端电压等),使得在该控制变量下发生事故后系统不发生越限故障;(2)校正控制的安全约束最优潮流CSCOPF(Corrective Security Constrained Optimal Power Flow)[2],基态及预想事故状态下采用不同的控制决策,通过进行事故发生后的发电再调整消除系统的越限情况。
现代电力系统的发展给SCOPF问题的求解带来了新的挑战。日益扩大的电力系统规模以及预想事故,使得SCOPF问题的求解规模越来越大,直接导致求解速度下降,计算结果对电力系统运行指导的时效性大幅降低,甚至由于计算机内存空间的限制而无法进行计算[3]。针对这些问题,学者们主要在2个方面进行了相关的研究探索。在模型求解之外,文献[4]提出采用网络压缩方法,把预想事故系统等值为与故障关联度较高的局部网络,从而压缩预想事故的系统规模,但事故的网络等值计算工作量较大;文献[5]提出采用事故过滤技术,在预想事故集中筛选出起主导作用的事故,减少加入到优化模型中的预想事故数量,需要循环执行多次SCOPF计算,执行效率不高。在模型的优化求解部分,文献[6-7]提出采用奔德斯分解法,把SCOPF问题分解为一个基态主问题以及与各个预想事故相关的子问题,对主从问题进行协调分解计算,有效控制了求解规模,但其理论上要求所求问题在可行域内为凸,而SCOPF问题一般情况下不满足该条件;文献[8]提出基于连续线性规划技术的方法,将该优化问题分解为非线性潮流和线性控制灵敏度计算子问题以及基于灵敏度的线性规划控制子问题,需要进行大量的灵敏度计算,求解过程较复杂;文献[9]在采用直流安全约束最优潮流(DC SCOPF)求解交流安全约束最优潮流(AC SCOPF)问题,提高了计算速度,但计算误差大,并且无法考虑电压的安全约束。
在电力系统中广泛使用的PSD-BPA、PSSSA等分析计算软件,都采用补偿法进行N-1快速轮断计算,计算结果得到工程技术人员的认可,并应用在电力系统的规划以及运行分析当中。针对SCOPF当中的静态PSCOPF问题,本文把补偿法运用到问题的优化求解过程中,通过建立等效模型,在优化过程中采用补偿法进行事故状态的快速计算,将其加入到安全约束当中,对不满足电力系统N-1安全准则的预想事故进行优化控制计算。所提方法避免了对事故状态的潮流求解,极大地缩小了问题的规模,在满足静态安全控制要求的基础上,大幅地缩短了计算时间,提高了求解效率,从而快速得到指导全网发电机组出力调整的最优控制策略。
1 问题的数学模型
传统的PSCOPF问题模型,通过将基态和事故状态的潮流方程以及安全约束方程联立进行优化求解[10-11]。 优化模型如式(1)所示:

其中,目标函数 f(x0,u0)可以是发电机有功出力变化量最小、发电费用最小、系统有功损耗最小等电力系统运行当中关心的参数;k=0,1,…,Nc组成该计算模型所考虑的预想事故集,下标k=0表示基态参数,k=1,2,…,Nc表示预想事故状态的参数;等式约束hk(xk,u0)表示系统的潮流方程,不等式约束包含系统控制变量u0以及状态变量xk,u0表示自变量,用于调整系统状态,事故前后保持不变,xk表示因变量,表示当前自变量u0下的系统状态分别为它们的上、下限约束。可以看到,当系统预想事故集包含Nc个预想事故时,模型中将包括Nc+1组等式方程以及Nc+1组不等式方程,模型大小主要由预想事故数量决定。因此,问题的求解时间将随着系统规模以及预想事故数量的增加而急剧上升,甚至由于超出计算机的可用内存而无法计算。
通过对PSCOPF问题的进一步分析可知,基态的作用是进行潮流调整,以满足当前系统的运行要求;预想事故状态的作用是校验事故发生后系统安全约束越限的情况[10]。由于控制变量在事故前后维持不变,事故后需要校验的只有状态变量,如果事故发生后的系统状态可以通过基态的系统参数直接求解得到,则预想事故后的系统潮流方程无需加入到求解模型当中。因此,上述PSCOPF问题可以转化为如下的等效模型[12-13]:

由式(2)可以看到,略去预想事故后的系统潮流方程之后,状态变量由基态参数通过函数表达式xk(x0,u0)表示,模型的等式部分只包含了基态潮流方程。预想事故集的变化只影响模型的不等式部分,同时考虑Nc个预想事故时,相比于传统的联立模型(1),减少了Nc组等式方程。并且可以注意到,在等效模型当中若不考虑预想事故的安全约束,模型本身就是一个传统的最优潮流OPF(Optimal Power Flow)问题。通过模型的等效转化,把复杂的PSCOPF问题转化成为了近似OPF模型,缩小了求解模型规模的同时,结构也得到了优化。求解式(2)等效模型的关键在于如何求得事故后系统的状态表达式xk(x0,u0)。
2 预想事故状态计算
求解事故发生后系统的状态实际上是一个静态安全分析 SSSA(Steady-State Security Analysis)的过程。为了提高SSSA的效率,一般采用快速分析方法,比如直流潮流法、灵敏度分析法以及补偿法[14]。直流潮流法通过把非线性电力系统潮流问题简化为线性电路问题,从而使分析计算方便快捷,但是精度差,并且只能校验过负荷,不能校验电压越界的情况;灵敏度分析法将线路开断视为正常运行情况的一种扰动,以节点注入功率的增量模拟断线的影响,计算精度较高,但计算过程复杂,计算节点注入功率增量的计算量较大[15];补偿法是指,当网络中支路开断的情况下,可以认为该支路未被开断,而在其两端节点处引入某一待求的电流增量或功率增量(或称补偿电流或补偿功率)来模拟支路的开断[16],是一种方便快捷地取得系统拓扑关系发生变化下系统电压的方法。
其中,补偿法求解快速,计算结构简单,故障判断准确,求解效率明显高于直流潮流法以及灵敏度分析法,有利于提高优化计算的效率。并且通过电压这一电力系统关键状态参数可以方便地求取系统的其他状态变量。因此,本方法采用补偿法求取事故下的系统状态变量的表达式xk(x0)。
假设系统发生断线事故k,采用补偿法对节点m、n之间的线路进行开断计算。可以视为在m、n之间并联一条与开断线路等值的负阻抗支路,即Z′mn=-Zmn。假设增加并联支路后网络的节点注入电流不变,可通过向节点m、n分别注入补偿电流Ikmn和-Ikmn的方法,在不改变原网络结构的情况下来模拟线路的开断。根据叠加原理,把图1(a)所示线路开断后的网络等效地拆分为图1(b)、(c)2 个网络[15,17]。

图1 补偿法原理示意图Fig.1 Schematic diagram of compensation method
图1(a)表示追加并联负阻抗为Z′mn的支路模拟线路断开后的网络;图1(b)表示追加并联负阻抗前的网络;图1(c)表示注入补偿电流Ikmn后的网络。N表示网络节点数。因此,线路开断后的电压Uk可表示为:

其中,U0表示网络改变前的系统电压;ΔUk表示网络改变后系统电压的变化量,其根据图1(c)网络通过向节点m、n注入补偿电流Ikmn和-Ikmn求得;U0表示系统正常潮流的节点电压,根据基态可求出。向网络中注入的电流向量可表示为:


其中,Y表示该网络的导纳矩阵;待求补偿电流Ikmn通过等值发电机原理求得(在此不详细介绍),其表示如式(6)所示。

如果把整个系统看成追加阻抗为Z′mn的支路的等值电源,式(6)中MTY-1M-Zmn的物理意义是追加的并联支路回路的等效阻抗,MTU0表示这个等值电源的空载电动势。结合式(3)和式(5)可得到线路开断后的节点电压:

其中,E表示N×N阶的单位对角矩阵;Zmn表示节点m、n 之间的线路阻抗;Lk=E-Y-1M(MTY-1M-Zmn)-1MT表示网络发生断线事故k的电压关联矩阵。
上述式(7)通过矩阵形式表示为:

其中,l表示除对角线外矩阵的非零值。
由式(8)可以看到,Lk是一个结构简单并且稀疏的线性矩阵表达式,只有对角线以及与开断线路两端节点m、n有关的列为非零值,其余位置的值全为零。Lk的表达式完全由系统的网络拓扑参数构成,不包含任何的状态变量。每一个预想事故对应的Lk只需要计算一次就能满足优化控制计算过程中对事故电压的计算要求。
PSCOPF问题主要考察系统发生事故后有功潮流转移所引起的线路传输功率越限故障。根据采用补偿法所求电压,预想事故状态下线路的有功功率表达式如下:

其中,Pkij表示预想事故后连接节点i、j的线路有功功率;Yij与αij分别表示连接节点i、j的线路导纳的幅值和幅角;Uki、Ukj与 δki、δkj分别表示预想事故后节点i、j的电压幅值与幅角,可根据式(8)求得。
3 误差影响及控制
补偿法在计算过程中做了一个重要的假设:事故发生后除断线事故两端节点外的节点注入电流或者注入功率不变。而实际上在断线事故发生后所有的节点注入电流或者功率都会发生变化。并且叠加法应用的前提是线性方程,上述补偿法将其应用在非线性的电力系统潮流问题中,都不可避免地引入计算误差。由于优化过程中PV节点的电压幅值作为控制变量在事故前后保持不变,为避免由于误差造成PV节点电压的偏移,所求PV节点电压幅值直接采用事故前的电压值。
在等效求解模型中,事故后系统状态的作用是对基态的控制变量进行约束,而基态经过完全潮流方程的校验。因此优化计算的结果完全满足基态运行要求,误差的存在仅会对越限故障的控制结果造成影响。而其中的负误差(补偿法计算结果小于实际值)会造成对实际事故状态变量约束的不足,使得经过优化调整后的系统进行N-1校验时仍会有线路功率轻微的越限。为保证对越限故障的有效控制,可以对约束进行“紧缩”处理。本文主要考虑事故后系统线路功率越限故障以及对其的控制,在此仅对事故线路约束的误差处理进行介绍。加入误差因子ε后,事故后线路有功功率约束表示为:

其中,Pij表示线路传输的有功功率;分别表示线路功率有功功率上、下限。误差因子表示补偿法计算值与实际功率值的相对误差百分数。ε取值越大,对约束收缩得越紧,可以获得更可靠的控制结果,但随着可行域的减小,该优化问题的目标函数值同时会受到影响。在实际应用中可以根据补偿法在系统计算中的误差设置合适的ε值,在保证控制结果有效性的基础上,获得理想的优化控制结果。
4 具体模型及求解
基于补偿法考虑多预想事故的PSCOPF问题具体求解模型如下。控制变量包括:发电机有功出力、发电机机端电压;考虑的系统故障为线路有功功率越限[18-20]。上标0表示基态变量,上标k表示预想事故状态变量。
a.目标函数:

其中,P0Gi、PG0i分别表示第i台发电机当前有功出力和初始有功出力;SG表示发电机集合。该式采用发电机改变量最小作为目标函数,以尽可能减小对发电机出力的调整。
b.等式约束:

其中,P0Di、Q0Di分别表示节点的有功和无功负荷;Q0Ri表示节点i的无功源无功出力;Yij、αij分别表示节点i、j之间线路导纳的幅值和幅角;U0i、δ0i分别表示节点i的电压幅值和幅角;N表示系统节点数;SN表示所有节点集合。式(12)是系统基态的潮流方程。
c.不等式约束:

其中,上、下划线分别表示变量或约束的上、下限;SR表示无功源节点集合;S0L、SkL表示线路集合;Sk表示预想事故集合。式(13)描述了基态发电机有功出力、无功电源出力、电压及线路功率约束。式(14)描述了事故状态电压及线路功率约束(虽然事故电压不作为故障进行优化计算,作为电力系统的重要运行指标,依然加入到了安全约束当中),其可根据补偿法由式(8)、(9)求得。
由于模型不涉及离散变量,本文所求解的问题是一个连续非线性规划问题。现代内点法由于其收敛速度快、鲁棒性强、可以方便地处理各类约束,特别适合求解如PSCOPF一类的大型电力系统问题,在电力系统优化领域得到了广泛的应用,因而采用内点算法进行求解该模型[21-24]。
5 算例测试
采用MATLAB2013(a)编程实现所提方法。运行环境为普通台式计算机,Intel Core i3四核处理器,主频3.2 GHz,2 GB内存,32位操作系统。对IEEE 30、IEEE 118、IEEE 300节点标准系统以及某 S-1047节点仿真系统进行对比测试,验证本文所提方法的有效性以及快速性。
5.1 有效性测试
采用IEEE 30以及IEEE 118节点系统对本文所提方法的有效性进行测试。SSSA采用补偿法进行系统N-1线路开断计算,考虑系统发生输电线路N-1断线事故后的线路有功功率越限故障。预想事故由断线线路序号表示,括号内表示线路连接的两端节点号。
5.1.1 IEEE 30节点测试系统
该系统有30个节点、41条线路、6台发电机,总有功负荷283 MW。系统结构如图2所示。根据该系统的补偿法误差分析,误差因子取ε=1.5%,电压限制取0.9~1.1p.u.。对该系统进行线路N-1静态安全分析,筛选出事故集为线路 1(1-2)、2(1-3)、4(3-4)、5(2-5)、6(2-6)、9(6-7)。
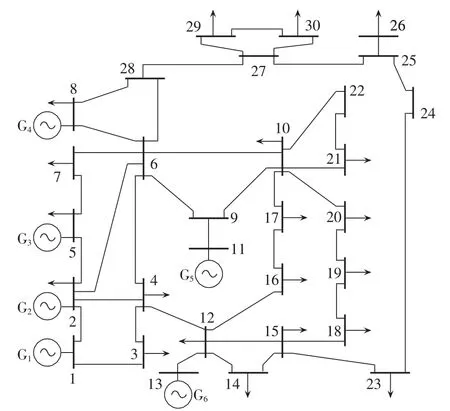
图2 IEEE 30节点系统Fig.2 IEEE 30-bus system
把事故集合中的所有事故作为预想事故集加入到基于补偿法的等效模型当中同时进行优化控制计算。系统的各发电机有功出力及机端电压的调整结果如表1所示,表中机端电压为标幺值,后同。
由表1可知,优化后系统发电机总有功改变量为75 MW,系统总有功出力由优化前的292 MW调整为289 MW,基本保持不变。因为PSCOPF问题的本质是根据系统的安全性要求,重新调整系统的潮流分布,从而预防事故发生后越限故障的发生,潮流分布的变化对系统有功损耗的影响造成了优化前后总有功出力的细微差别。调整发电机有功出力以及机端电压后的得到系统新的基态,在此基础上再次进行SSSA计算,校验故障线路的功率。校验结果如表2所示。
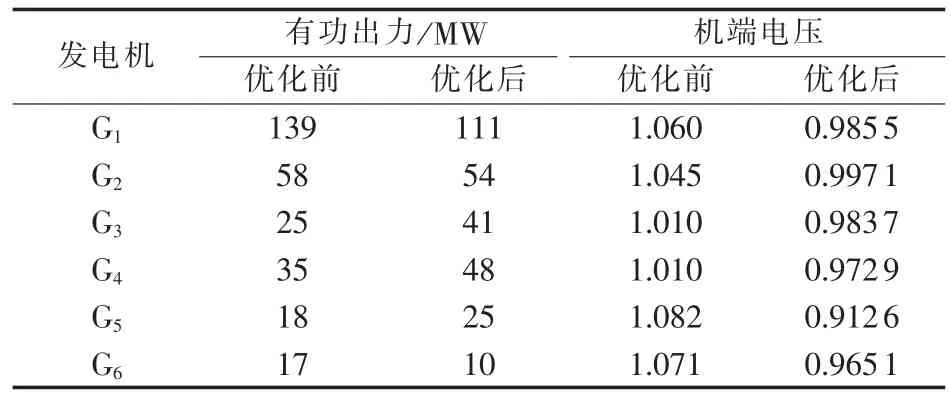
表1 IEEE 30节点系统发电机优化结果Table 1 Results of generator optimization for IEEE 30-bus system

表2 IEEE 30节点系统线路功率控制结果Table 2 Results of branch active-power control for IEEE 30-bus system
由表2可知,进行控制计算后,越限故障线路功率都得到了有效的控制。由于引入了误差因子,所以优化后的值并没有完全到达约束上限,但部分已经接近限制值。优化过程中起主导约束作用的是线路1、2和5、9开断事故,部分线路功率都接近了约束的上限。在该系统中,线路1、2作为发电机G1的2个电能输出通道,当G1出力过大时会造成其中一条线路断开后另一条线路功率越限。因此,发电机G1的有功出力应该保持在出线的功率限制以下,以保证系统N-1安全性。同时,节点5和节点7接有重负荷,由发电机G3以及线路5和线路9为其供电,线路5、9中任意一条线路退出运行都会造成另外一条线路功率增加,并导致线路功率越限。在保证负荷供电不受影响的情况下,应通过增加发电机G3的出力,提高该区域内部的电能供给能力,减少线路5和线路9上的传输功率,从而消除事故后的功率越限故障。
从表1中可以看到,优化后的发电机G1出力为111 MW,降到了线路功率限值以下。发电机G3有功出力由优化前的25 MW提高到了41 MW,线路5、9一同承担的功率为由92 MW减少到76 MW,从而使得其中任一线路发生断线事故后另一线路都不会超出功率约束80 MW的限制,其余发电机则做出相应的出力调整,以满足系统的功率平衡,这与通过实际分析的调整结果是一致的。
为说明控制结果的现实有效性,参照表1的发电机出力及机端电压结果调整系统的基态,采用潮流法SSSA对其进行N-1验证,表3表示ε取值不同时的校验结果。

表3 IEEE 30节点系统潮流法静态安全分析校验结果Table 3 Verification results of static security analysis based on power flow for IEEE 30-bus system
表3列出了没有加入误差因子(ε=0)时,采用所提方法进行优化后仍存在线路功率越限的2个开断事故。可以看到,即使不进行误差控制(ε=0),大部分原有故障都已得到了有效的控制,整个系统的N-1越限故障只有线路1、5开断造成的线路7、9功率轻微越限,取得了很好的控制效果。本例采用ε=1.5%,优化控制的结果则完全通过了N-1线路开断计算的校验,所有越限故障都得到了消除,使得计算结果更具有效性。
5.1.2 IEEE118节点测试系统
采用规模更大的IEEE118节点系统对所提方法有效性进行进一步的验证。误差因子ε取3%,电压限制取0.9~1.1 p.u.。该系统包含118个节点,186条线路,16台发电机,总有功负荷4227 MW。通过补偿法SSSA计算得到预想事故集为线路15、29、30、34、35、50、87、88、113、115、123、124、126、146。
采用本文所提出的方法对由开断事故线路集合中的14条线路组成的预想事故集进行优化控制计算。发电机有功出力以及机端电压的优化结果如表4所示。
本文方法基于补偿法进行优化控制,所以其结果完全满足补偿法SSSA,表2中已经进行了验证,该系统的补偿法校验结果在此不再列出。采用基于潮流法的SSSA对优化结果进行验证,结果如表5所示。
由表5可知,ε=0时的优化结果会使得线路124开断造成的线路126功率轻微越限,其余线路越限均得到了有效控制。本算例采用ε=3%时,则所有线路功率越限故障全部都控制在限制内。
通过IEEE 30以及IEEE 118节点系统的测试,表明本文所提方法能够对复杂大系统进行多预想事故的有效优化控制。并且通过设置合适的误差因子可以使得优化结果完全满足系统的预防性控制要求,采用潮流计算进行验证,表明结果具有现实应用意义。在实际计算中发现,补偿法的线路功率计算误差一般不超过3%,ε取0~3%可满足控制的要求,并且其与系统规模的大小并无关系,完全可以适应大规模系统的计算。

表4 IEEE 118节点系统发电机优化结果Table 4 Results of generator optimization for IEEE 118-bus system

表5 IEEE 118系统潮流法静态安全分析校验结果Table 5 Verification results of static security analysis based on power flow for IEEE 118-bus system
5.2 快速性测试
在第1节等效模型的介绍当中提到等效模型在理论上具有比传统联立求解模型更快的计算速度以及更好收敛特性。下面对其进行相关的验证测试。测试所指传统方法是指采用联立事故前后潮流方程求解PSCOPF问题的方法,同样采用MATLAB进行编程实现。
首先研究模型规模与预想事故数量的关系。由于求解模型规模的大小直接影响计算时间,为更加客观地进行比较,排除收敛过程不同所造成的干扰,在此用求解过程中单次迭代计算所用的时间表征模型规模大小。在IEEE 118以及IEEE300节点系统上进行对比测试,做出单次迭代计算时间与预想事故数量关系图,如图3所示。

图3 单次迭代时间与预想事故数量关系Fig.3 Relationship between single iteration time and postulated contingency number
图3中,时间曲线斜率越大说明模型规模受预想事故数量影响越大。随着预想事故数量的增加,实线和点划线呈超线性增加的趋势,增长十分迅速,IEEE 118节点系统以及IEEE 300节点系统考虑50个预想事故的求解时间比考虑单个预想事故时分别增加了70倍以及90倍,并且系统的规模越大计算时间的增长速度越快。而虚线和点线呈近似线性的缓慢上升,考虑50个预想事故,2个测试系统的单次迭代时间都仅增长了13倍,远低于联立求解方法。本文所提方法表现出对预想事故数量的低灵敏度特性。
选取 IEEE 30、118、300节点系统以及 S-1047节点仿真系统对不同预想事故数量的迭代求解过程进行综合测试比较。测试结果如表6所示。

表6 计算时间对比Table 8 Comparison of computation time
由表6可以看到,所提方法在收敛性上要普遍好于传统联立求解方法,求解时间具有明显优势。随着预想事故数量的增加,这种优势越来越明显。进一步分析可以发现,预想事故数量的增加,传统方法耗时增量主要来自于矩阵规模的扩大所增加的矩阵运算时间;本文所提方法所耗时间增量的其中一部分来自处理各个预想事故的变量计算上,如S-1047测试系统中,预想事故由5个增到14个时,求解时间增加9 s,其中有3.2 s来自于增加的预想事故状态计算。而预想事故状态的计算是相互独立的,满足并行计算的要求,采用并行计算技术同时进行多个预想事故参数的计算可以进一步提高计算速度。
6 结语
本文提出预防性静态安全控制的快速计算方法,通过建立等效的求解模型,缩小了问题模型的规模,优化了模型结构;优化过程中采用补偿法进行预想事故参数计算,对预想事故状态安全约束的越限情况进行快速校验;最后运用内点法对模型进行求解,实现对多预想事故的PSCOPF问题的快速优化计算。在多个测试系统进行对比测试及分析,验证了所提方法的有效性,并且在达到优化控制效果的前提下,比传统方法具有更好的收敛特性及模型对预想事故数量的低灵敏度特性,占用内存少,计算速度快。配合基于补偿法的SSSA结果,可以快速完成对电力系统静态安全稳定的分析与优化控制计算,对于考虑多预想事故的大规模复杂电力系统,可以指导全网发电机进行预调整从而有效地预防电力系统潜在故障的发生,提高电力系统的静态安全性与可靠性。
