带可控臂的绳系卫星短距释放实验研究*
2015-09-17王加成金栋平
王加成 金栋平
(南京航空航天大学机械结构力学及控制国家重点实验室,南京 210016)
带可控臂的绳系卫星短距释放实验研究*
王加成 金栋平†
(南京航空航天大学机械结构力学及控制国家重点实验室,南京 210016)
通过绳系卫星轨道面内运动的天-地动力学相似,利用地面物理仿真平台实验研究绳系卫星短距离释放的控制问题.首先建立带控制臂的绳系卫星系统非线性动力学方程,获得天-地动力学相似条件,采用比例-微分反馈控制方法,对受控绳系卫星的姿态运动进行数值仿真.其次,利用地面物理仿真平台实现绳系卫星的天-地动力学相似环境,通过单根刚性臂实现卫星姿态运动和系绳摆动的两自由度运动控制.实验和数值对比结果表明,借助控制臂可以有效的对绳系卫星的释放进行控制.
绳系卫星, 动力学相似, 物理仿真, 释放, 控制
引言
未来空间任务的多样性要求开发新的航天飞行器,绳系航天器在构筑大孔径基线、捕捉空间碎片、轨道再入、动量转移等一系列航天任务中具有独特作用,是一种新型的航天飞行器系统[1].
国际上将绳系卫星作为一个宇航项目进行了多次在轨试验,例如NASA对绳系卫星控制机构作了多次改进,成功进行了SEDS-1和SEDS-2近地轨道绳系释放和回收试验[2-3].2007 年 9 月,欧空局YES2绳系卫星成功进行了31.7km导电系绳的在轨释放试验,试验表明YES2能够实现星间动量转移任务[4].日本为研究空间绳系机器人建立了STARS项目,并利用探空火箭对绳系机器人进行了多次控制试验[5-6].伴随这些试验的开展,许多学者对绳系卫星的运动与控制等进行了分析和数值仿真,如张力控制率策略[7]、后退时间区间控制仿真验证[8]、卫星空间分离研究[9]以及三自由度绳系卫星的最优控制等[10].与此同时,绳系航天器的地面物理仿真系统逐步建立和完善[11].例如,日本学者提出通过旋转的倾斜坡面来再现绳系卫星释放导致的Colioris效应[12]、利用自由落塔实现微重力环境下的卫星姿态控制[13]、地面气浮平台系统[14],以及南京航空航天大学提出通过喷气控制再现绳系卫星空间动力学环境的物理仿真系统[15-16].
本文通过天-地动力学相似原理建立绳系卫星系统实验非线性动力学模型,继而基于喷气控制实现等效的地面动力学环境,采用可控刚性臂产生的力矩控制绳系卫星的姿态,实现绳系卫星释放过程的姿态控制.实验结果表明,采用可控臂可以对绳系卫星的姿态进行精确控制.
1 天-地动力学相似
研究主星运行于圆轨道的面内绳系卫星系统,如图1所示.子星质量为m、半径为r,带有长度为l2的一刚性臂,并通过长度为l1的系绳与主星相连,φ1表示刚性臂摆角,φ2表示子星姿态角.考虑到主星质量远大于子星质量,因而忽略子星运动对主星轨迹的影响.定义固连于地球的惯性坐标系OXY和主星轨道坐标系oxy.设主星位置矢量为RM,子星相对惯性系和轨道系的位置矢量分别为RC和rC,rC=[x,y]T,这里

子星短距释放时,l1,|x|,|y|<<RM,子星受到地球的重力为

式中ω为主星轨道角速度.
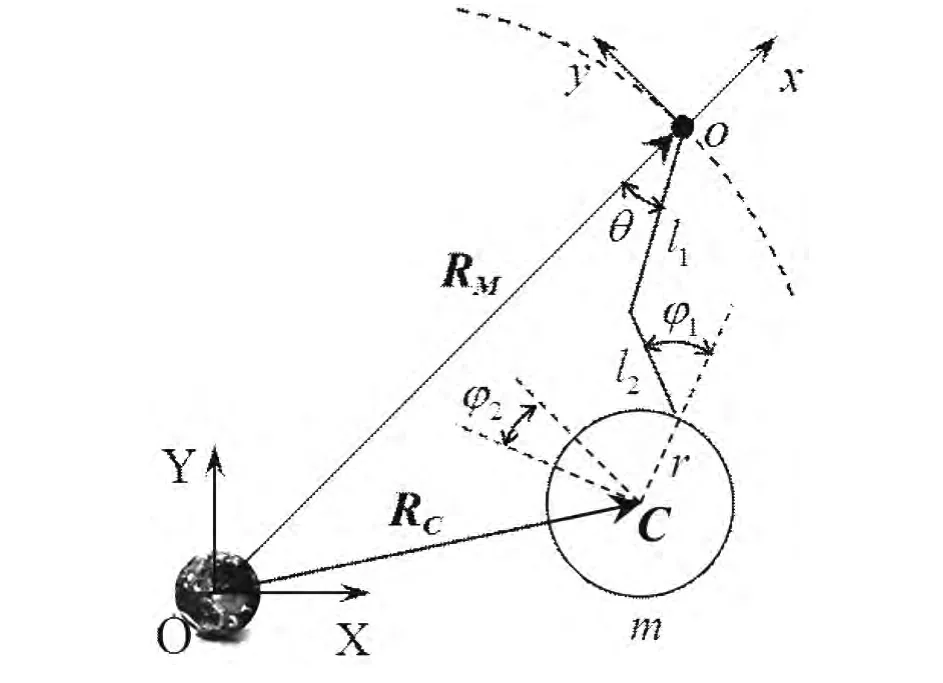
图1 绳系卫星力学模型Fig.1 The model of tethered satellite system
系绳张力

该张力相对子星质心的力矩是

式中 α=φ2-θ.根据=T+G和=M,得到绳系卫星非线性动力学方程

式中J为子星转动惯量.
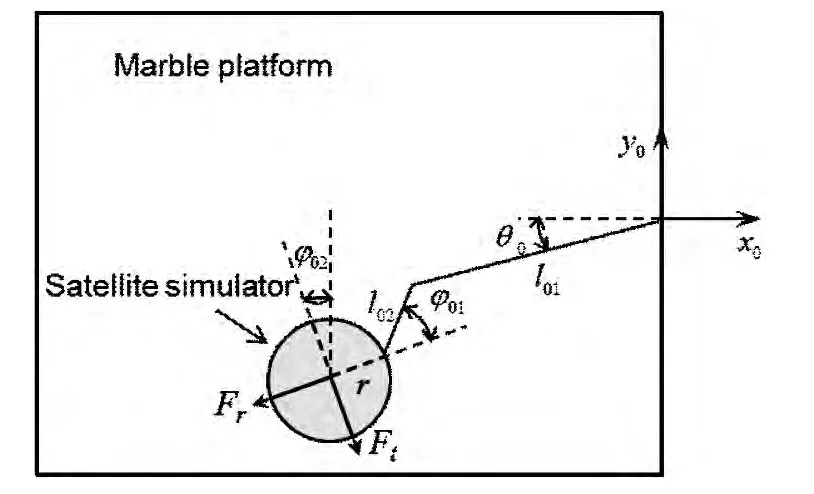
图2 物理仿真模型Fig.2 The physical simulation model
为了进行绳系卫星地面实验研究,构建地面物理仿真平台系统,如图2所示.该卫星仿真器在地面物理仿真平台上的动力学方程为

通过对比天-地动力学模型可见,若沿卫星仿真器x和y方向施加控制力Fx和Fy,并且令

则可获得天-地动力学相似.这里采用卫星仿真器上的两向喷气力Ft和Fr来实现该动力学相似环境,即
图书馆通过创建服务品牌,重塑图书馆新形象,提高用户对图书馆的认可度和满意度,促进图书馆事业的发展,从而推动图书馆的实践工作。图书馆服务品牌的构建,需要以用户的差异化、多样化需求为出发点,不断提炼服务品牌的理念,深化服务品牌的内涵,建立长效机制,涌现出让人耳目一新的服务品牌。近年来,建立了一系列全国性、区域性的知名服务品牌,比如“百城共读”“山东尼山书院”“浙江省图书馆文澜讲坛”、华南理工大学图书馆“智慧华图”等。

这样即可通过控制这两向喷气力来模拟绳系卫星的空间力学环境.
2 短距释放控制
绳系卫星从主星弹射释放时易产生初始扰动,这种扰动会使卫星姿态运动发散,因而需要施加控制以使释放过程渐近稳定.本文采用施加刚性臂以产生控制力矩的方法对卫星姿态加以控制,同时系绳俯仰运动渐近稳定.例如,无刚性臂控制时,根据方程(5)可得

式中l3=l2+r.施加刚性臂,并采用比例-微分反馈控制,即

关于参数kp,kd的选择,考虑到系绳摆角θ非常小,简化方程(5)第三式并做线性化处理可以得到

对于式(11)的二阶线性系统,考虑其欠阻尼的情况,该系统的稳定性需满足

建立以kp,kd为坐标的参数区域,如图3所示.考虑到实际情况下,刚性臂控制角φ1不宜过大,故选择控制参数kp=1,0.4≤kd≤1.将式(10)代入方程(5)得到
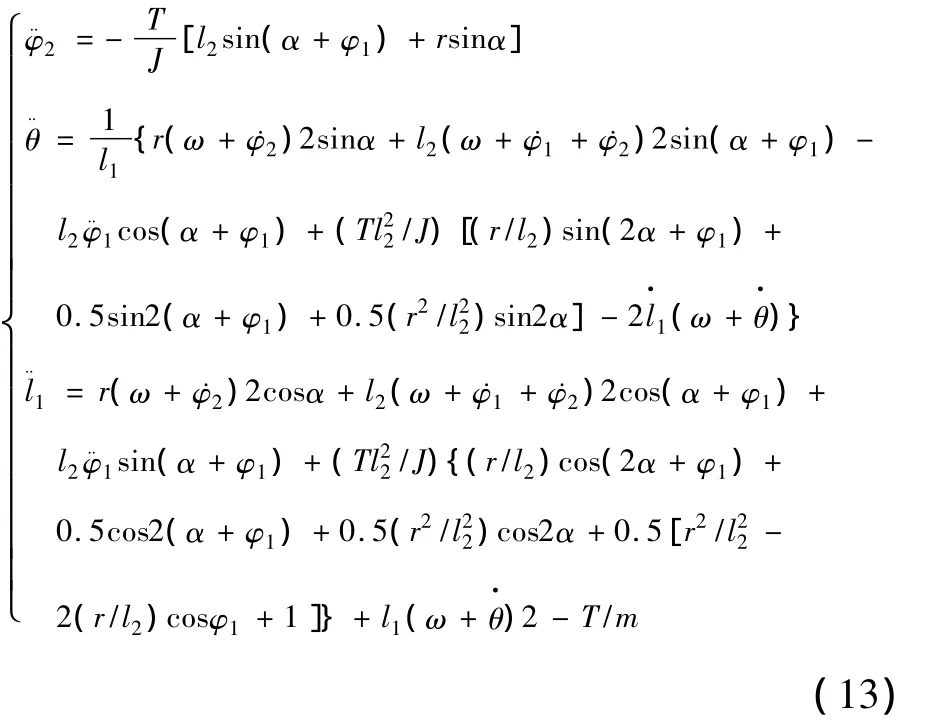
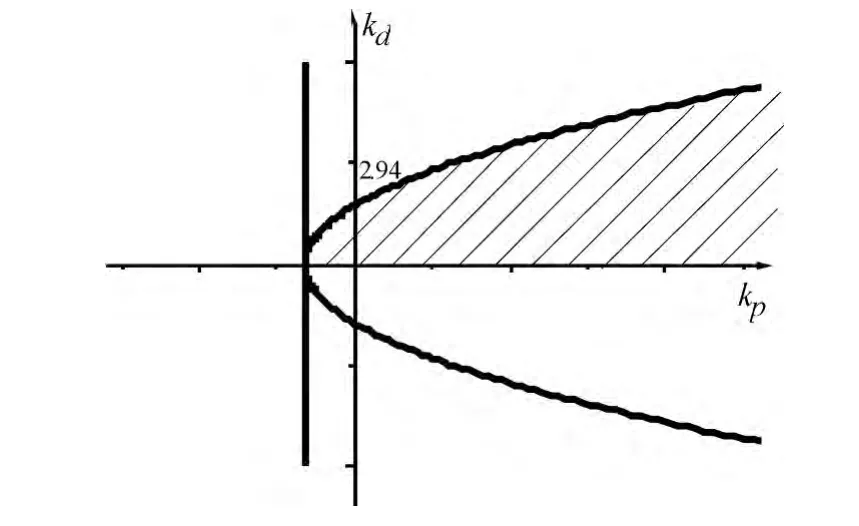
图3 稳定参数区域Fig.3 Stability region in parameter plane

图4 控制效果Fig.4 The control effect
3 绳系卫星物理仿真系统
采用绳系航天器地面仿真平台系统进行实验验证,如图5所示.该平台由一块水平花岗岩石、绳系卫星仿真器、光学动态测量系统、收放机构等组成.系绳为Dyneema纤维材料.自行设计的绳系卫星仿真器如图6所示,主要组成部分为:气瓶、减压阀、空气比例电磁阀、气浮轴承、压力传感器、机载计算机、D/A转换器、电源、电源转换器、无线通讯模块、功率放大器、喷口、动量轮、控制机械臂等.
仿真器底部三个气浮轴承支撑其无摩擦的悬浮于花岗岩平台上.气浮轴承采用直径50mm圆形平板气浮轴承,它运用多孔介质技术使气流通过上百万亚微米级细孔,均匀穿过整个轴承表面,与气浮平台之间形成厚度小于5 μm级气膜.气浮轴承额定气压4MPa,单个气浮轴承负载达350N.
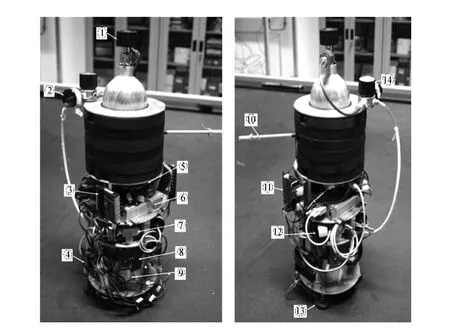
图6 卫星仿真器Fig.6 Satellite simulator
绳系卫星仿真器气源系统如图7所示.碳纤维气瓶利用二氧化碳作为气源,容积1.1L,工作压力30MPa.气源一路为气浮轴承提供4MPa压力以支撑仿真器,另一路输出至空气比例电磁阀控制喷气力输出.

图7 气源系统示意图Fig.7 Schematic diagram of air supply system
仿真平台的光学动态测量系统,如图8所示.采用德国GOM公司研制的PONTOS三维动态测量系统进行测量.该系统高性能图形工作站、高速相机、传感器控制器及闪光控制器等构成,相机最高采样频率60Hz.动态测量系统对绳系卫星仿真器上的荧光标志点进行位置捕捉,通过图像处理软件得到各点的像素坐标,识别精度在60 μm以内.图形工作站在获取各点的像素坐标后,经计算转为实际物理量并通过无线通讯模块发送至仿真器上的机载计算机和系绳收放机构进行控制.

图8 光学动态测量系统Fig.8 Optical dynamic measuring system
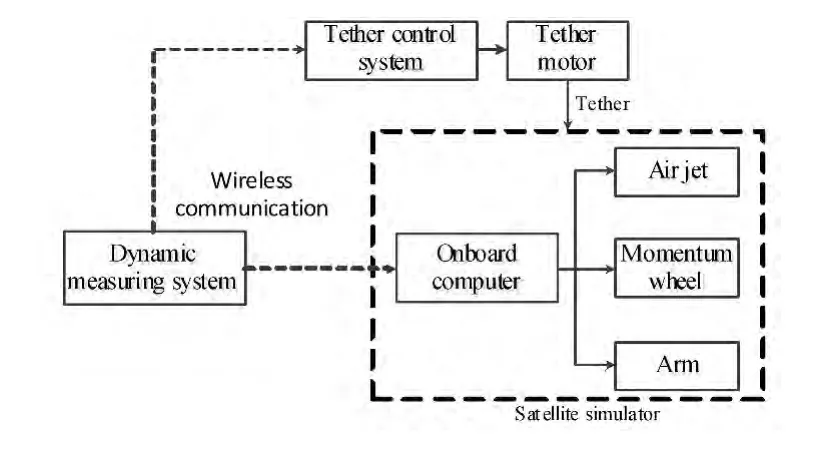
图9 卫星仿真器控制系统Fig.9 The control system of satellite simulator
绳系卫星仿真器的控制系统包括喷气组件、动量轮、系绳收放组件和可控机械臂,可实现对仿真器位置和姿态控制,控制流程如图9所示.动态测量系统测得仿真器位置和运动状态,根据控制算法计算各部分模拟量和控制量,然后利用无线通讯模块分别将数据发送至机载计算机和系绳收放机构,同步控制系绳卷线电机、喷气组件、动量轮和可控机械臂.
4 实验结果
(1)无控制情况,给予初始扰动 φ2=0.7rad/s,结果如图10和11所示.
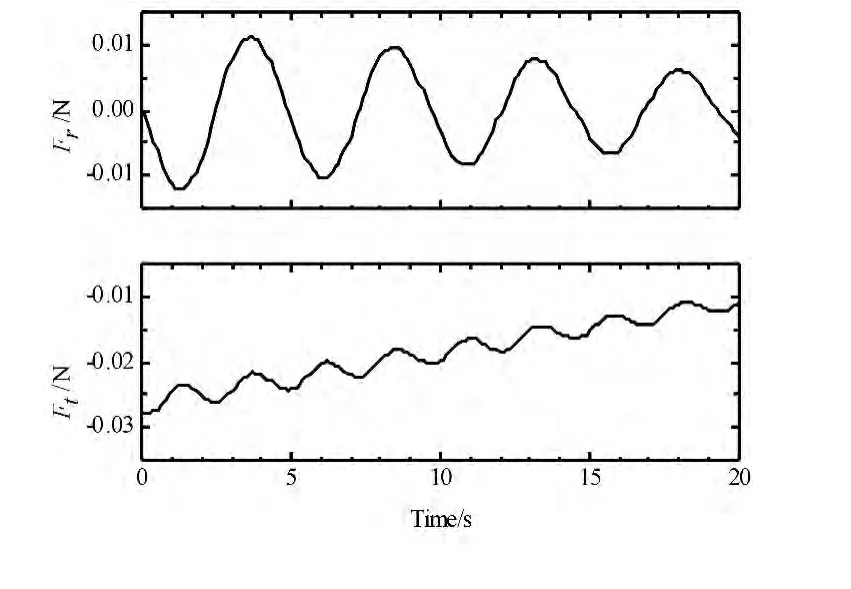
图10 不加控制时喷气力输出Fig.10 Propulsion forces without control

图11 不加控制实验与数值对比Fig.11 Comparison between experiment and simulation without control
(2)利用刚性臂施加控制,选择控制参数kp=1,kd=0.4,0.8,如图12和13所示.

图12 施加控制时喷气力输出Fig.12 Propulsion forces with control

图13 施加控制实验与数值对比Fig.13 Comparison between experiment and simulation with control
图11给出了不加控制时,卫星姿态与系绳摆角的实验与数值对比结果,实验中卫星姿态与系绳摆角因初始扰动呈振荡摆动,与数值结果相符.实验与数值结果的姿态角振荡峰值分别为0.478rad和0.530rad.图13给出了施加控制时,卫星姿态与系绳摆角的实验与数值对比结果,实验基本实现了控制要求,通过刚性臂力矩输出控制卫星姿态,实现了对卫星在姿态和系绳摆角两个自由度上的控制,经4-5个周期即可将初始扰动抑制下来,与数值仿真吻合.选取±0.04rad作为稳态值的误差带,系统性能指标的实验与理论对比结果如表1所示.

表1 性能指标对比Table 1 Comparison of performance
从对比结果中可以看出:实验结果中,姿态角振荡峰值在施加控制情况下明显小于未施加控制的情况,同时参数kd从0.4增大到0.8,使峰值从0.354rad 减小到 0.316rad,稳定时间从 12.25s减小到9.81s,与数值解的变化趋势吻合,验证了控制方法的可行性与有效性.因此选择适当的控制参数,可使卫星姿态快速稳定.在控制末端卫星仿真器姿态和系绳摆动有极小的摆动偏差,偏差小于0.03rad,这是由于刚性臂控制电机微小摄动及卫星仿真器本身控制偏差所致.
5 结论
针对圆轨道绳系卫星短距离释放姿态控制问题,本文构建地面物理仿真平台来实现绳系卫星天-地动力学相似环境,并采用可控刚性臂控制卫星姿态和系绳摆动.气浮实验表明,采用比例-微分反馈控制方法实时计算量小,对机载计算机不会造成负担,同时能够有效抑制初始扰动对于姿态和系绳摆动的影响.实验结果中,施加控制后卫星姿态角振荡峰值明显减小,同时将控制参数kd从0.4增大到0.8,使得姿态振荡峰值从0.354rad减小到0.316rad,使稳定时间从 12.25s 缩短到 9.81s,与数值结果相符.说明采用基于可控刚性臂的比例-微分反馈控制方法是可行、有效的,能够在利用系绳张力控制绳系卫星到达指定位置的同时,使绳系卫星姿态和系绳摆角达到同时稳定的目标.
1 金栋平,文浩,胡海岩.绳索系统建模、动力学与控制.力学进展,2004,35(3):304~313(Jin D P,Wen H,Hu H Y.Modeling,dynamics and control of cable systems.Advances in Mechanics,2004,35(3):304 ~ 313(in Chinese))
2 Dobrowolny M,Stone N H.A technical overview of TSS-I.The first tethered-satellite system mission.II Nuovo Cimento,1994,17(1):1~12
3 Carroll J A,Oldson J C.Tethers for small satellite applications.In:AIAA/USU Small Satellite Conference.Logan,Utah,1995,1 ~16
4 Kruijff M,Vanderheide E.Qualification and in-flight demonstration of a european tether deployment system on YES2.Acta Astronautica,2009,64(9):882~905
5 Nohmi M,Yoshida S.Experimental analysis for attitude control of a tethered space robot under microgravity.Space Technology,2004,24(2~3):119~128
6 Nohmi M,Tanikawa J.Simulation analysis of a tethered space robot for space experiment on sounding rocket by JAXA/ISAS.In:Proceedings of the IEEE International Conference on Mechatronics and Automation.Xian,China,2010
7 Pradeep S.A new tension control law for deployment of tethered satellites.Mechanics Research Communications,1997,24(3):247~254
8 Williams P.Application of pseudospectral methods for receding horizon control.Journal of Guidance,Control,and Dynamics,2004,27(2):310~314
9 卢丽颖,孟宪红,邢依琳.卫星空间分离动力学研究.动力学与控制学报,2014,12(2):165~169(Lu L Y,Meng X H,Xing Y L.Dynamic study of satellite space separation.Journal of Dynamics and Control,2014,12(2):165~169(in Chinese))
10 Jin D P,Hu H Y.Optimal control of a tethered subsatellite of three degrees of freedom.Nonlinear Dynamics,2006,46(1~2):161~178
11 陈辉,文浩,金栋平,胡海岩.绳系卫星在轨试验及地面物理仿真进展.力学进展,2013,43(1):174~184(Chen H,Wen H,Jin D P,Hu H Y.Experimental studies on tethered satellite systems.Advances in Mechanics,2013,43(1):174 ~184.(in Chinese))
12 Kojima H,Furukawa Y,Trivailo P M.Experimental verification of periodic libration of tethered satellite system in elliptic orbit.Journal of Guidance,Control,and Dynamics,2011,34(2):614~618
13 Nohmi M,Yoshida S.Experimental analysis for attitude control of a tethered space robot under microgravity.In:Proceedings of 54thInternational Astronautical Congress.Bremen,Germany,2003
14 Chung S,Kong E M,Miller D W.Dynamics and control of tethered formation flight spacecraft using the SPHEREStestbed.In:Proceedings of the AIAA Guidance,Navigation,and Control Conference and Exhibit.San Francisco,CA,2005,1~26
15 文浩,金栋平,胡海岩.绳系卫星收放控制地面实验研究.振动工程学报,2010,23(1):7~11(Wen H,Jin D P,Hu H Y.Ground-based experimental study on deployment and retrieval control of tethered satellite.Journal of Vibration Engineering,2010,23(1):7~11(in Chinese))
16 Hu H Y,Wen H,Jin D P.Dynamic control and groundbased experiments of a tethered satellite system.In:Proceedings of IUTAM Symposium on Nonlinear Dynamics for Advanced Technologies and Engineering Design.UK,2010
*The project supported by the National Natural Science Foundation of China(11002068,11202094),A Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions,and the Research Fund of State Key Laboratory of Mechanics and Control of Mechanical Structures(Nanjing University of Aeronautics and astronautics(0113Y01)
†Corresponding author E-mail:jindp@nuaa.edu.cn
EXPERIMENTAL RESEARCH ON SHORT DISTANCE DEPLOYMENT OF TETHERED SATELLITE SYSTEM WITH CONTROLLABLE ARM*
Wang Jiacheng Jin Dongping†
(State Key Laboratory of Mechanics and Control of Mechanical Structures,Nanjing University of Aeronautics and Astronautics,Nanjing210016,china)
Based onphysical simulation experiment,an attitude control problem concerning the in-plane motion of a tethered satellite system with short distance deployment is studied by means of dynamics similarity between the groundbased experiments and the on-orbit system.Starting with nonlinear dynamic of the tethered satellite system with controllable arm,dynamics similarity conditions between the ground-based experiments and the on-orbit system are obtained.using the proportion differential feedback control strategy,a numerical simulation is performed to the attitude motion of the controlled tethered satellite.Subsequently,the similar on-orbit environment is realized by experimental platform.The ground-based test is conducted,the control of the attitude motion tethered satellite the tether swing is achieved only using single rigid arm.Finally,the comparison of experimental and numerical results demonstrate that the of rigid arm can effectively control the deployment of the tethered satellite.
tethered satellite system, dynamics similarity, physical simulation, deployment, control
10.6052/1672-6553-2015-011
2014-11-03 收到第 1 稿,2014-12-14 收到修改稿.
*国家自然科学基金资助项目(11002068和11202094)、江苏高校优势学科建设工程资助项目、机械结构力学及控制国家重点实验室自主研究课题资助(0113Y01)
E-mail:jindp@nuaa.edu.cn