某无人机载监视雷达天线稳定系统设计
2015-09-15陈美芳
陈美芳,王 虎
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
某无人机载监视雷达天线稳定系统设计
陈美芳,王 虎
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
稳定系统是雷达的重要分系统之一。文中在传统设计方法的基础上,将结构设计和伺服控制进行高度集成,充分考虑各自的特点,通过合理设计和精心布局,找到了一种重量轻、体积小、精度高的无人机载稳定系统。文中对无人机载监视雷达稳定系统的组成、结构设计、伺服控制以及关键技术进行了阐述。实践证明,该稳定系统的各项指标均满足性能和实际使用要求。该设计为今后类似的设计提供了宝贵的经验。
监视雷达;稳定系统;结构设计;伺服控制
引 言
无论和平时期还是战争时期,雷达监视装备在必要的保障和及时获知敌情方面一直发挥着重要的作用。相对于航天系统,机载雷达监视系统具有一系列优势:灵活机动、快速进出战场和热点地区、成本较低等[1-2]。世界各国使用的监视雷达系统分为有人机载和无人机载2种。尽管有人机载监视雷达仍具有相当的应用市场,但是无人机载监视雷达的作用亦越来越明显,发展也越来越快。无人机载监视雷达天线稳定系统在设计过程中还存在如下诸多难点[3]:
1)受到使用环境和条件的限制,无人机对雷达的重量和尺寸有着严格的要求。文中的雷达天线尺寸为700 mm × 260 mm;天线重量≥17 kg;稳定系统的重量要求为伺服控制器≤0.6 kg,扫描器(含转接板)≤4.4 kg。
2)方位、俯仰扫描范围较大(文中的俯仰转动范围为-95°~ +95°)。
3)系统对天线座的伺服带宽、传动精度、指向精度等性能指标要求高(文中的指向稳定精度为俯仰优于0.15°)。
由此可见,无人机载监视雷达天线稳定平台是个复杂的系统,不仅对体积和重量有严格的控制,还要能够对结构和伺服控制系统进行很好的协调和匹配。为了解决上述难题,保证雷达天线稳定系统的各项指标满足要求,本文在传统设计方法的基础上将机电进行高度集成,充分考虑结构和伺服控制各自的特点,从系统指标出发,为雷达总体方案的实现提供了保证。
1 稳定系统组成
文中的稳定系统由平台(扫描器)和伺服控制器2部分构成,系统的组成结构图如图1所示。

图1 系统组成结构图
2 系统设计
2.1 扫描器结构设计
扫描器为一轴分体式结构形式,由扫描器前端和扫描器后端2部分组成,天线安装在两者之间。扫描器前端和扫描器后端固定在天线舱的顶板上。载机的安装架刚度一般,由于需同时考虑温度的影响,因此采用天线驱动端轴承“固定”、另一端轴承“游动”的安装方式。
扫描器主要由扫描器前端、扫描器后端、俯仰驱动装置组成,其中俯仰驱动装置集成在天线单元内,如图2所示。

图2 稳定平台结构示意图
(1)扫描器前端
如图3所示,扫描器前端主要由支架、支座、扇齿、轴、轴承以及整体式旋转变压器等组成。支座与轴通过一对深沟球轴承构成主体承力结构,固定和支撑整个天线单元;支架通过螺栓与支座连接;扇齿与支座固定安装;俯仰角度信息反馈使用整体式旋转变压器。该扫描器前端结构紧凑,安装精度高,同时方便一端出线。

图3 扫描器前端结构图
(2)扫描器后端
如图4所示,扫描器后端主要由支架、支座、轴、轴承、波纹管以及转接板等组成,主要起固定和支撑整个天线单元的作用。为保证一端游动,轴承外圈通过支座端面和法兰固定,控制轴与轴承内圈的配合公差,保证轴伸缩时能自由游动。为了减小扫描器在工作时电缆的缠绕力矩,轴与转接板之间的电缆通过波纹管走线,经过固定在支架上的转接板,与舱内设备相连。

图4 扫描器后端结构图
(3)俯仰结构
通过前期方案论证,对直接驱动和间接驱动2种驱动形式进行了比较,结果采用了直流电机驱动。其优点是重量轻、驱动力矩大;缺点是有背隙,精度低。如图5所示,俯仰驱动装置由直流电机、减速机、驱动齿轮和偏心套组成,集成于天线单元内,与天线一起转动。为方便走线,伺服控制器也安装在天线内部。

图5 俯仰结构图
2.2 伺服系统设计
稳定平台伺服系统是基于计算机控制的数字式控制系统,其原理框图如图6所示,主要完成以下功能[4]:
1)接收惯性导航系统的数据,获得载机各姿态角变化,实现天线俯仰维的运动补偿控制。
2)接收任务管理的工作指令,完成相应工作方式的动作;同时,向任务管理反馈伺服控制分系统的各种状态信息。
3)具有零位校正和软件限位功能。
4)具有自动故障检测、故障BIT功能。

图6 伺服控制原理框图
为了在载机姿态变化的情况下,使天线在惯性空间中的指向稳定,伺服控制系统需要对载机的运动进行补偿,以隔离载机姿态变化对天线指向的影响。因采用方位相扫和俯仰机扫,所以伺服控制分系统主要对天线俯仰进行实时运动补偿。
利用捷联式惯性导航稳定技术,根据载机的各个姿态角进行姿态解算,对载机运动干扰进行软件补偿,以隔离载机的运动干扰,实现天线空间指向稳定。图7为运动补偿的控制方框图。

图7 控制方框图
3 关键技术的实现
3.1 轻、小型化结构设计
使用环境和条件对整个雷达系统的空间尺寸、重量,尤其是机载稳定系统,都提出了苛刻的要求。要设计出在有限的空间和重量条件下满足要求的天线座系统,“轻、小型化”设计技术就显得极其关键。为了满足指标要求,本文开展了以下工作:
1)准确分析雷达系统的运行工况,降低负载,确定最佳的外形布局;
2)通过合理的集成,优化内部结构设计,充分利用空间;
3)利用ANSYS有限元分析软件对各零部件的钢强度进行分析,去除冗余部分,减轻重量。
3.2 自适应支承技术
针对天线俯仰支承跨距大、轴系变形大的情况,在扫描器中采用2个调心滚子轴承作为支承。调心滚子轴承具有优越的调心性能,可以自动补偿由轴系挠曲变形等各种原因导致的轴线偏斜,当轴系变形较大时,不会出现轴承摩擦力矩增大、甚至转不动的现象[5]。
天线与两端轴连接成一个整体,在两端采用两调心轴承支承,两轴承的中心是固定的,与两端轴承座的安装中心重合,在两轴承座的同轴度指标很高的情况下,天线轴线与轴承座轴线保持一致,能达到很高的回转精度。
这种支承方式的优点是自适应能力强,能适应轴系因加工、装配、结构变形、外力、温差产生的偏斜,增加轴系抵抗变形的能力。但支承精度取决于两支承座孔的同轴度,对轴承座的加工、装配和调整精度以及地基的环境适应性提出了一定的要求。
3.3 刚强度优化设计
稳定平台是雷达系统结构中的重要环节,它在支撑雷达天线及相关配件重量的同时将驱动电机输出的驱动力矩逐级放大[6]。此外,当雷达系统工作时,因受环境因素的影响,无人机载天线座还要承受飞机过载、冲击等影响。因此,非常有必要对稳定平台系统的结构进行刚强度力学性能分析。
本文采用ANSYS有限元分析软件对稳定平台的各个零部件在不同工况下(加速度响应、正弦振动载荷)进行了较为详实的静力学分析。在1g加速度作用下的变形如图8所示(最大变形为0.042 mm),正弦振动载荷下应力分布如图9所示(最大应力为21.2 MPa),满足结构的刚强度要求。
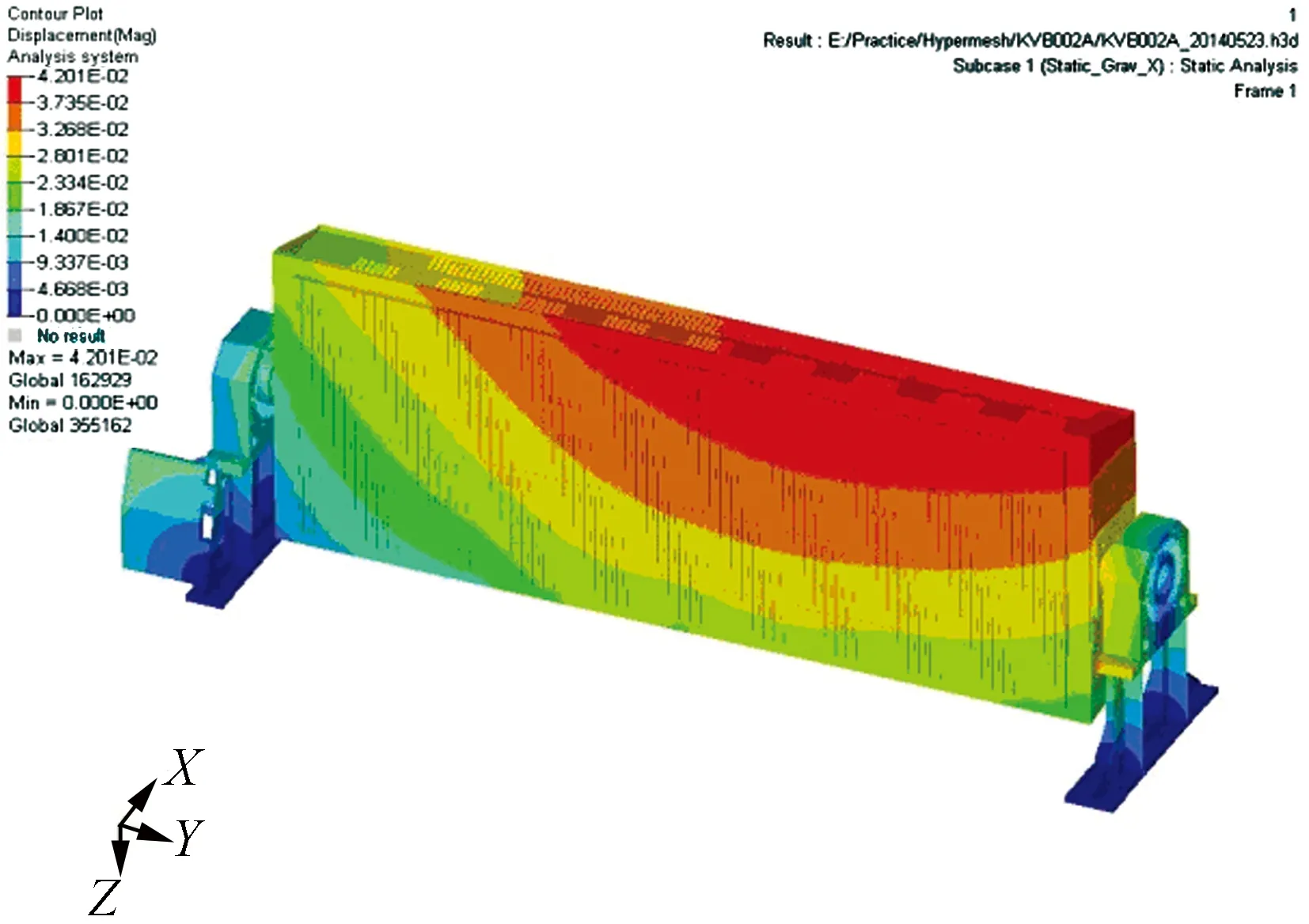
图8 加速度响应下天线座的变形图
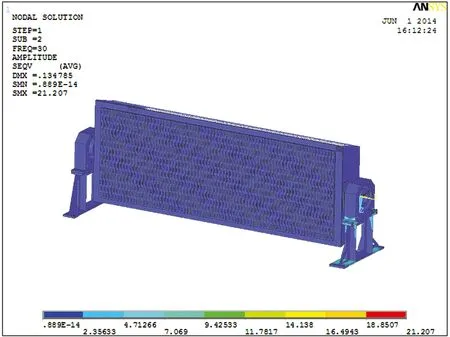
图9 正弦振动载荷下天线座的应力分布图
4 结束语
通过优化设计,稳定平台的重量和体积均能达到总体指标要求,且结构简单;经过分系统调试和雷达全机联调,该稳定平台满满足雷达的性能和精度指标要求,且性能良好、稳定。本文提供了一种可靠而又有效的系统设计方法,可为无人机载雷达产品的设计和研究奠定理论和实践基础,具有可观的应用前景。
[1] 刘亮, 吉波. 无人机载雷达现状及发展趋势[J]. 现代导航, 2014(3): 227-230.
[2] 杨晶梅. 军用无人机揭秘[M]. 北京:国防大学出版社, 2004.
[3] 段勇军, 张为晴. 无人机载SAR天线座系统设计与分析[J]. 现代雷达, 2013(8): 66-69.
[4] 高安帮. 机电一体化系统设计禁忌[M]. 北京:机械工业出版社, 2008.
[5] 吴凤高. 天线座结构设计[M]. 西安:西北电讯工程学院出版社, 1986.
[6] 岳振兴,周勤. ANSYS有限元分析及其在某雷达天线座结构设计中的应用[J]. 电子机械工程, 2004, 20(2): 18-20.
陈美芳(1981-),女,工程师,主要从事雷达系统机械传动方面的研制工作。
王 虎(1986-),男,工程师,主要从事雷达机电传动设计工作。
Design of a Stabilization System of Unmanned Airborne Surveillance Radar Antenna
CHEN Mei-fang,WANG Hu
(The38thResearchInstituteofCETC,Hefei230088,China)
The stabilization system is one of the most important parts of the radar. In this paper, the structure design and servo control are highly integrated based on the traditional design, with their characteristics considered fully. The light-weight, small-volume and high-precision stabilization system of an unmanned airborne surveillance radar antenna is completed through reasonable design and careful layout. The system composition, structure design, servo control and key technologies for the stabilization system are described. The test shows that all the technical parameters meet the performance and application requirements. It provides valuable experience for the design of similar systems.
surveillance radar; stabilization system; structure design; servo control
2014-11-05
国家科技支撑计划(2011BAH24B05)
TN820.8
A
1008-5300(2015)02-0026-03
